







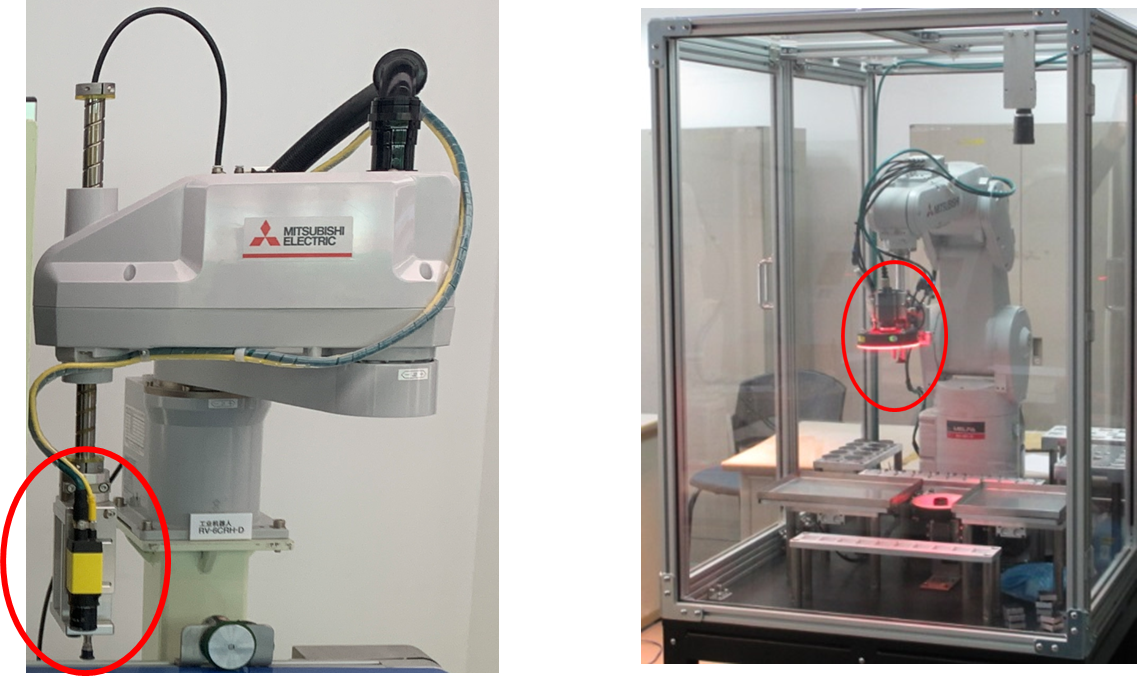
1、什么是手臂相机?
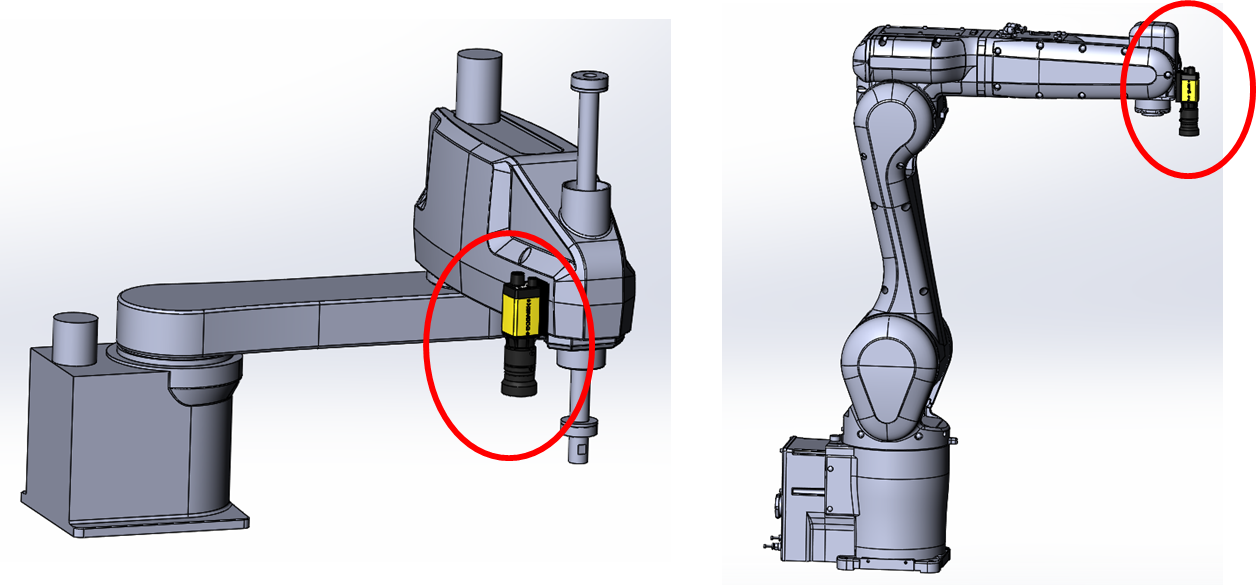
2、为什么使用手臂相机?
3、使用手臂相机时注意事项有哪些?
①相机识别工件后,相比应用已经非常成熟的抓手相机来说,工件的位置计算方法相对较难。
②手臂相机的相机视野中心求取方法(将工具点设到相机视野中心)跟抓手相机不同,并且很有可能无法跟抓手相机一样,将相机视野中心移动至指定目标位置(包含角度)。
如四轴机器人,手臂相机安装至J2轴手臂后,就丧失了2个自由度。当上下移动J3轴或者旋转J4轴时,手臂相机根本不动,因此没办法通过使用“TLXY”程序将工具点设置到相机视野中心。并且,当移动机器人控制点至指定目标位置时,通常手臂相机无法按照要求动作,如旋转角度C时,手臂相机无法跟随一起转动,无法调整相机高度等。
③手臂相机无法和抓手相机一样进行相对位置标定
如下图所示,以往抓手相机可以通过相对位置移动进行标定。
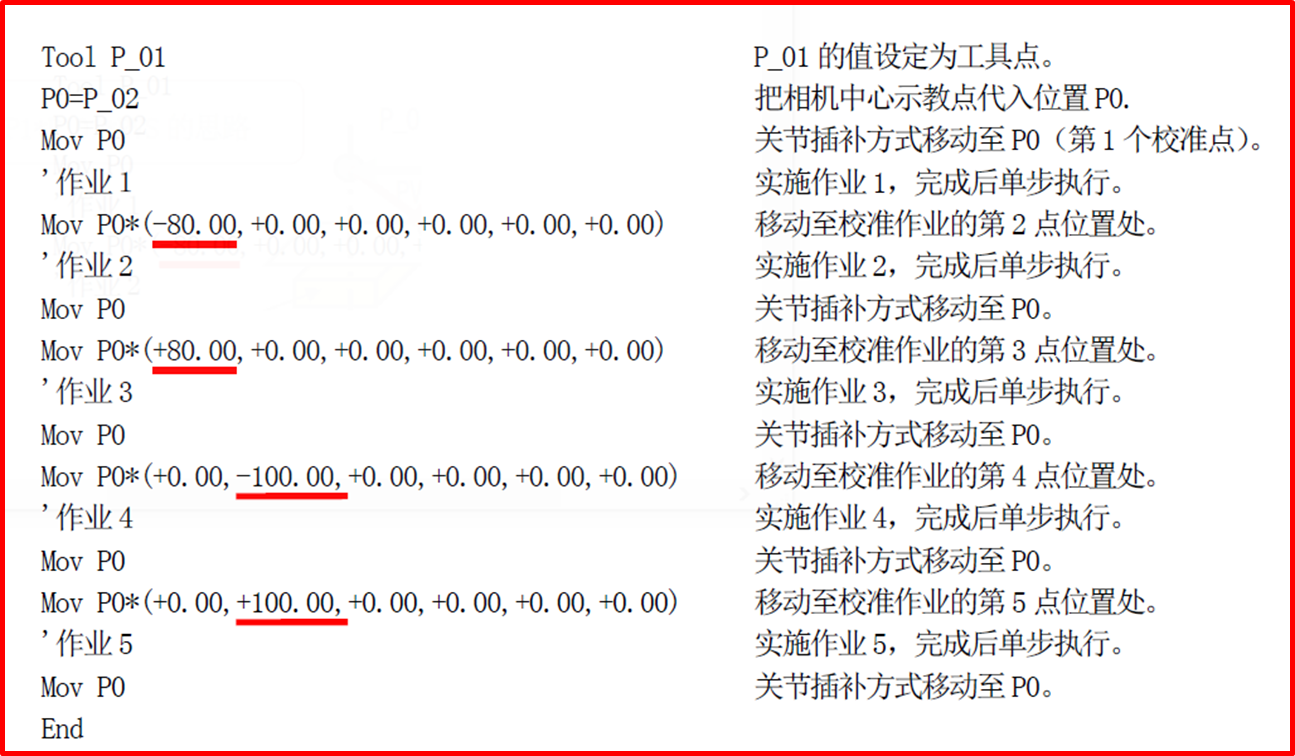
后续在工件位置计算时,利用相对位置计算方式求取工件位置。 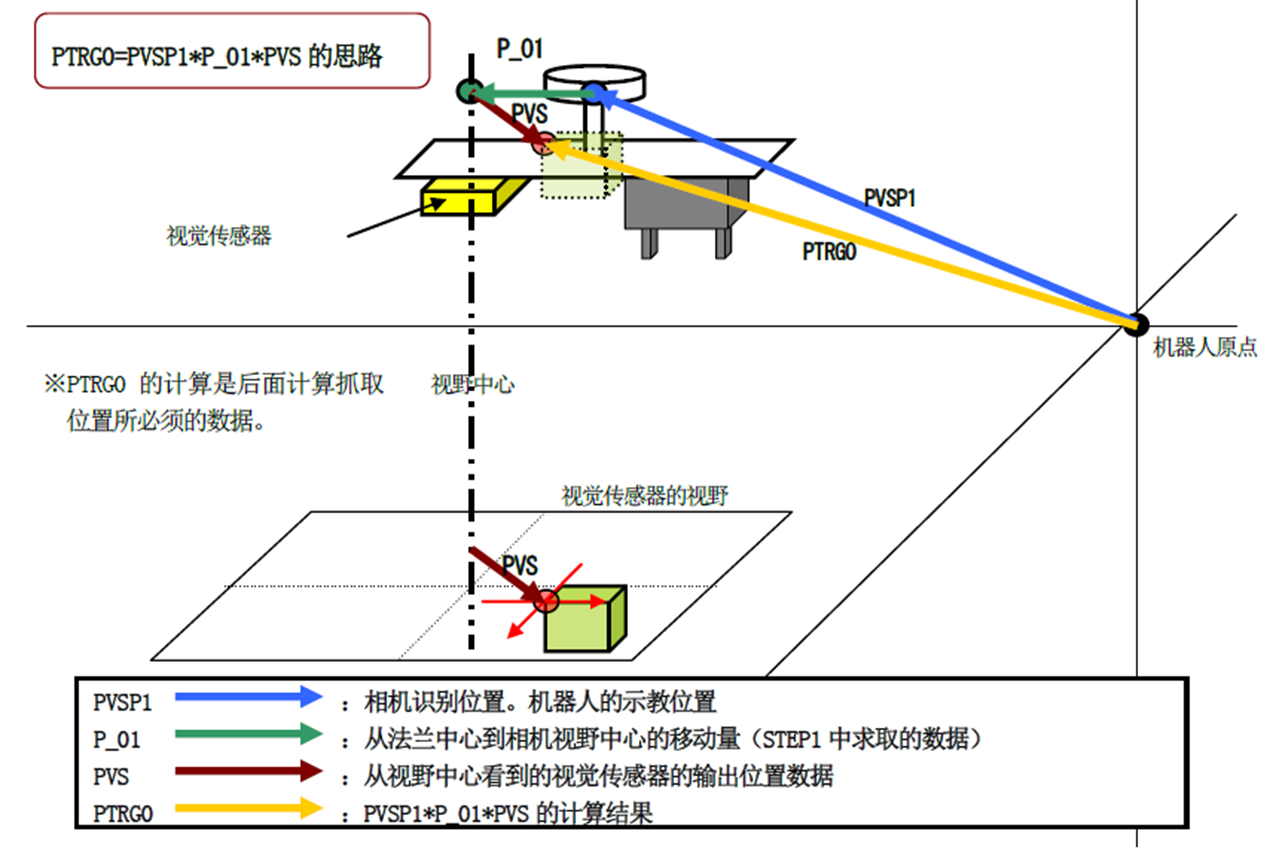
由于手臂相机无法跟抓手相机一样,通过旋转相机的方式,然后将工具点设定到相机视野中心。并且无法和抓手相机一样,与机器人控制点之间为一个固定的相对位置关系,因此无法跟抓手相机一样进行工具点设定及相对位置方式标定。
4、手臂相机不同位置处拍照算法考虑
跟抓手相机考虑方法不同,是通过绝对位置下坐标运算求取相机识别工件的位置。
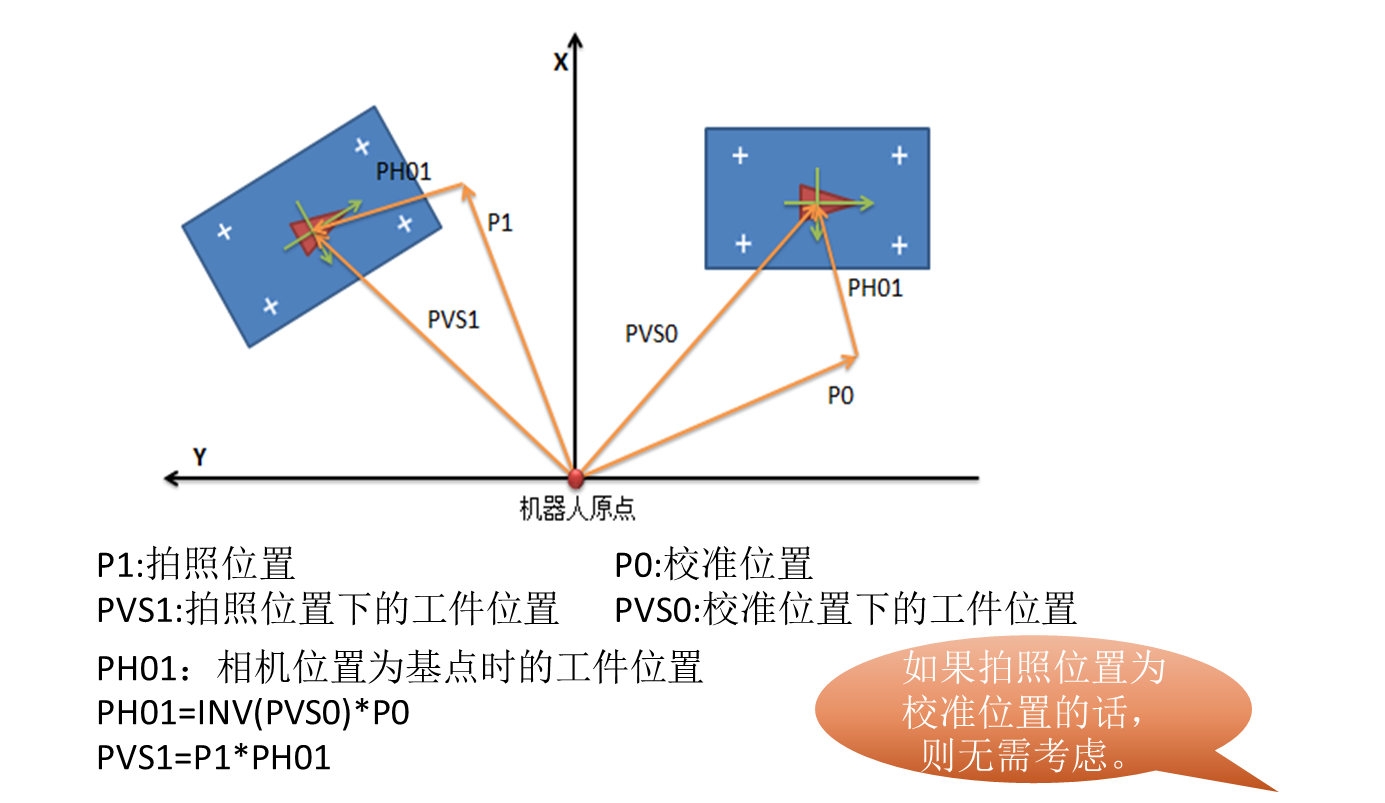
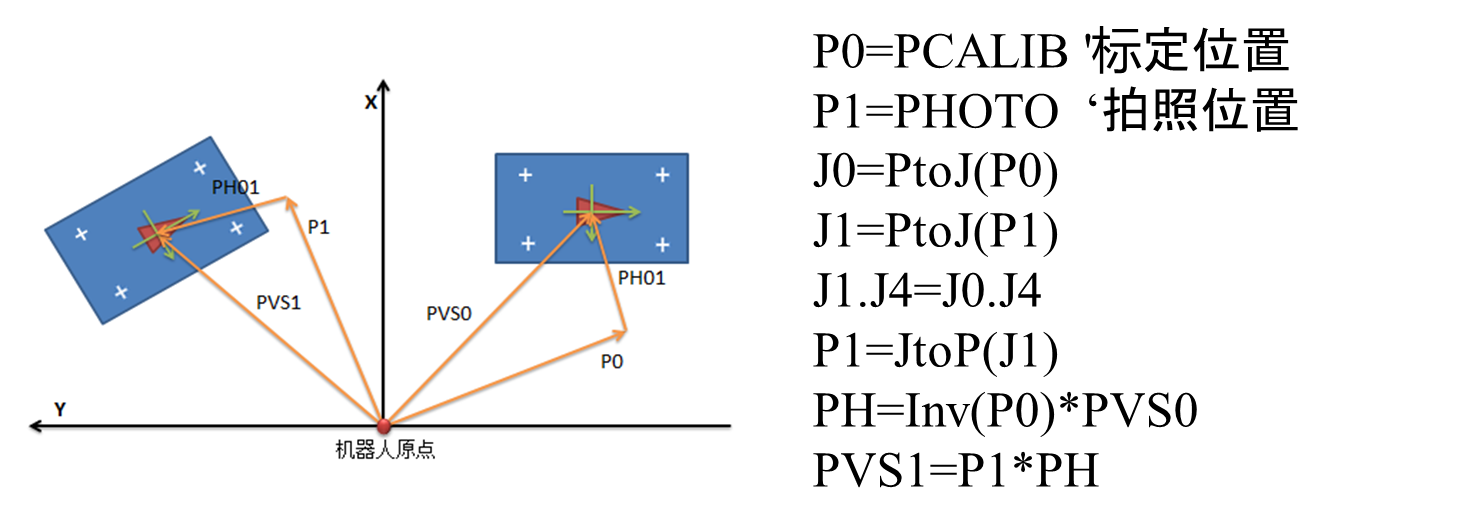
另外,在实际运算时还需要考虑新的拍照位置P1和标定位置P0的J4轴角度不一致,使得工具点位置不在相机视野中心,从而导致计算结果有误。因此,需要进行将新的拍照位置和标定时拍照位置保持一致处理。
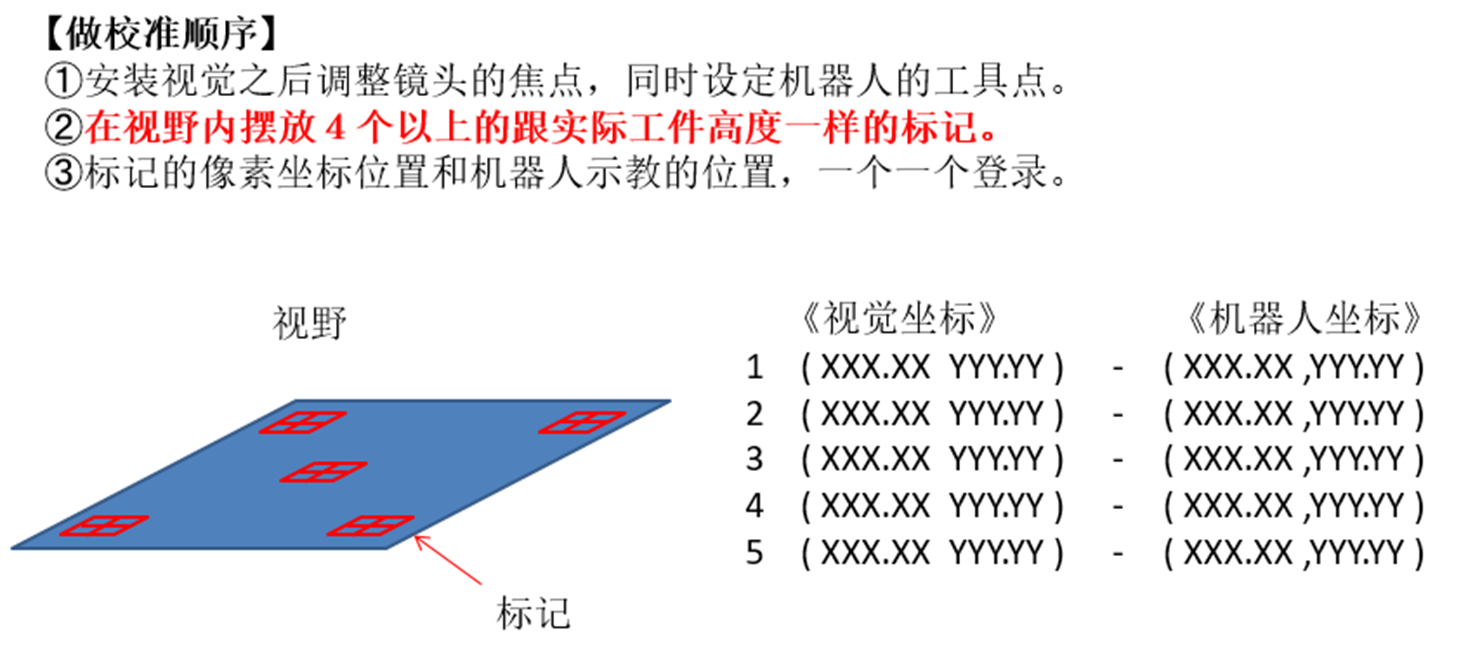
5、手臂相机标定方法考虑
手臂相机校准方法可以参考固定相机方式,在将抓手上尖针处设定为工具点后,分别将标志点的像素坐标和标志点的位置进行登录。
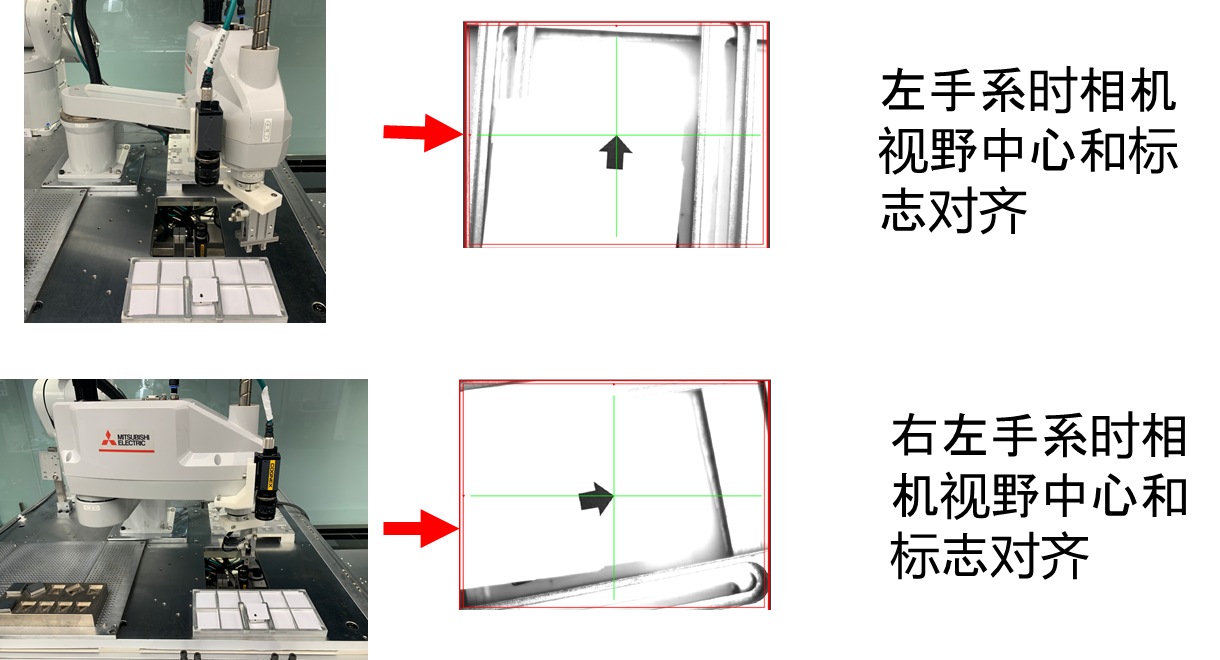
6、如果想将手臂相机视野中心设为工具点,如何做?
在相机视野中心建立一个十字交叉线,然后分别以左手和右手姿势使标志点跟相机视野中心重合。并分别将此时的点位数据保存下来。注意移动过程中只移动J1轴和J2轴。
接下来运行如下所示的程序后,可以求取相机视野中心的工具点数据PCamTool。

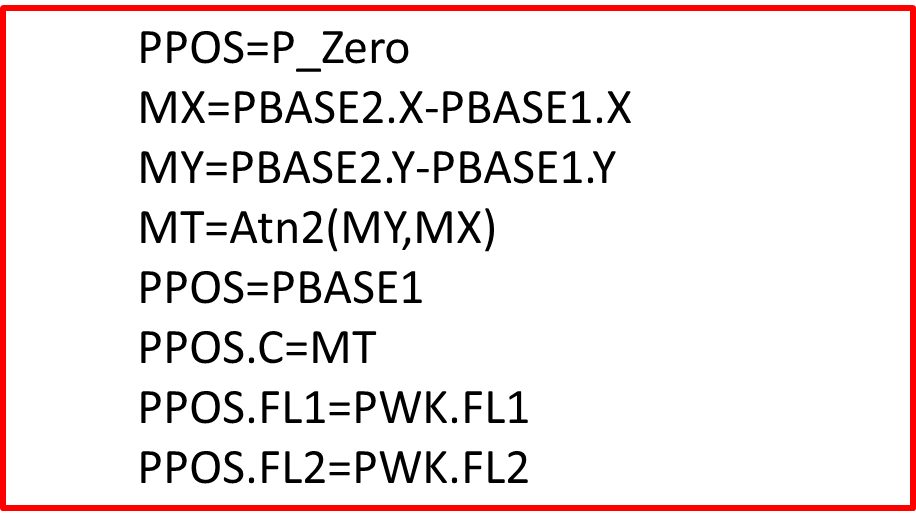
7、如何通过识别工件上的两个特征点计算工件位置?
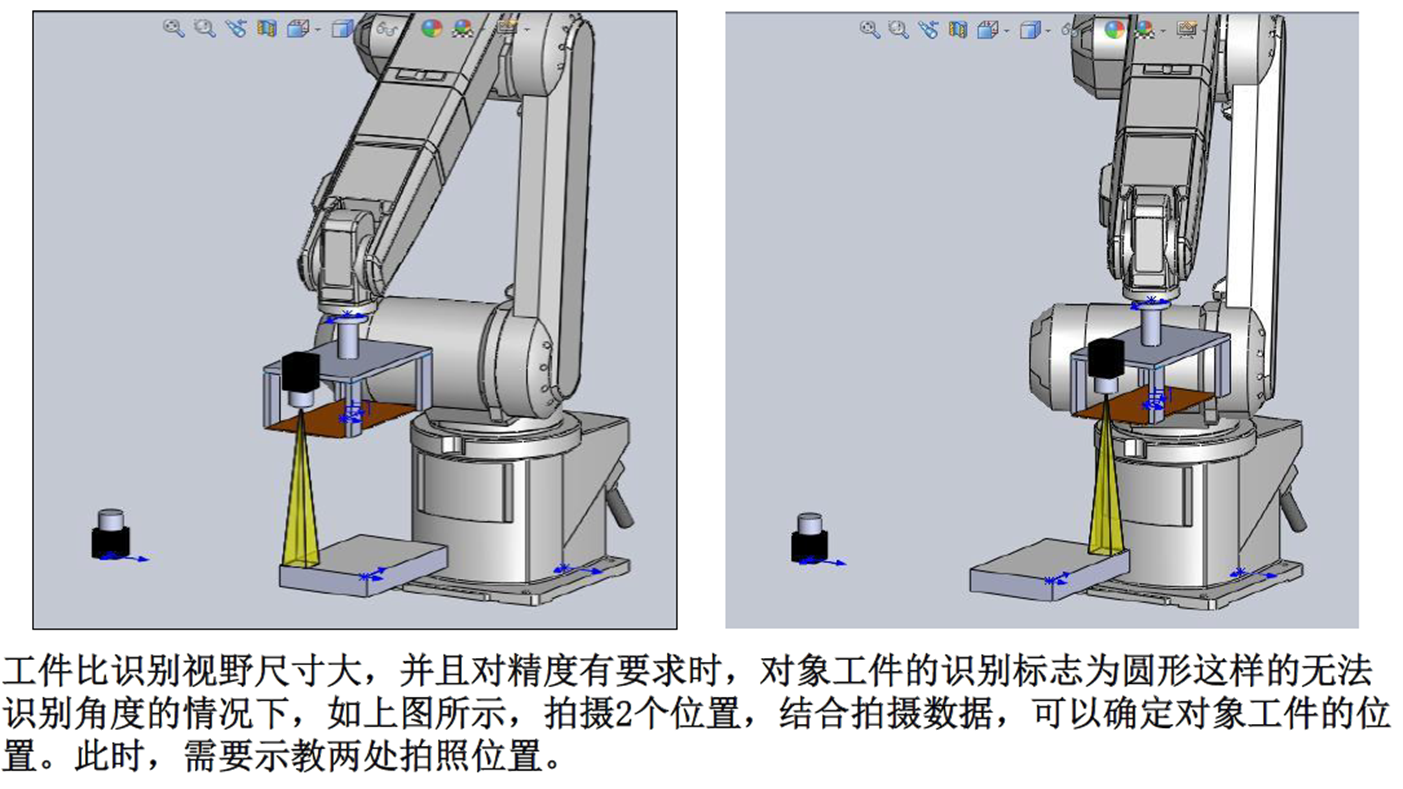
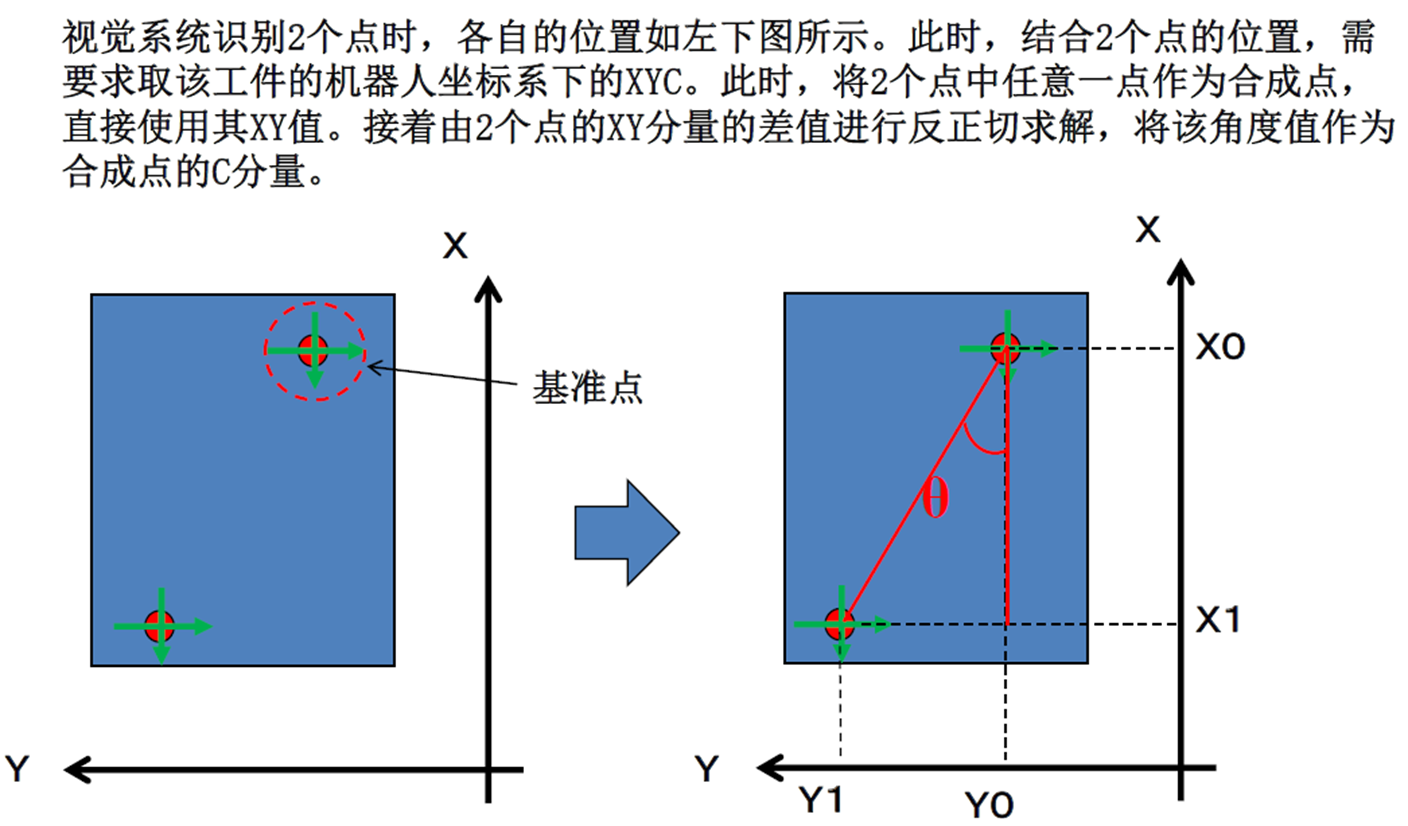
如果标志点1识别的位置为PBASE1,标志点2识别的工件位置为PBASE2,则通过两个点识别得到的工件的位置PPOS的算法如下所示:
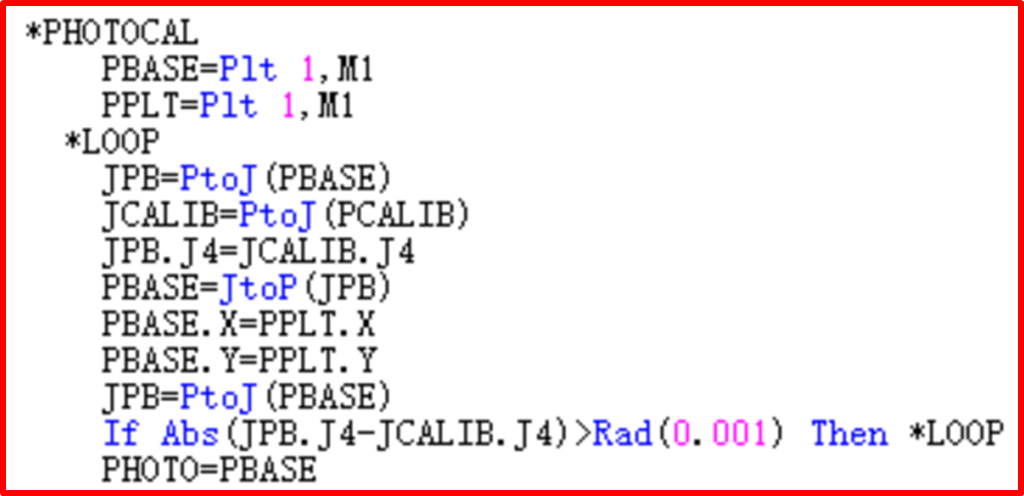
8、如何将手臂相机视野中心移动至指定位置?
当拍照位置很多,比如托盘上很多个拍照点位时,不希望一一示教时,不可以使用以往的托盘指令计算得到的点位后直接移动过去。因为托盘指令计算出来的点位转换成关节变量后,通常情况下J4轴的角度和标定时的角度不一致,导致机器人移动至该点位后,希望拍照区域不在相机视野范围内。此时,可以通过以下算法去计算拍照位置。
以上是手臂相机使用时相关算法考虑及注意事项。记住,手臂相机和抓手相机不同,当机器人旋转末端关节轴时,相机不跟随移动,此时相机和机器人的相对位置关系发生改变。因此,在后续相关位置计算处理时,需要将末端关节轴的角度全部使用一个固定的值处理,如一开始在进行相机标定时,将J4轴角度设为0度,从而方便后续处理。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









