







- 目前在一些食品、药品、3C、光伏等行业,客户对节拍时间的要求越来越高。
- 根据项目的不同阶段,可以将提速分为以下三个阶段:
-
前期系统设计阶段
此处需要结合系统整体的要求,来决定机器人所在设备的节拍和精度要求 。一般前期系统设计阶段通过软件模拟方式来验证方案可行性。但是,当机器人的节拍和精度要求较高时,需要提前进行实机样例实验,以确认方案可行性。
在前期系统设计阶段,如果确认机器人节拍无法满足节拍要求时,可以尝试从以下几个方面去考虑:
由于前期设计阶段基本上已经决定了整个设备的节拍。因此,希望尽量把工作坐在前面,积极参与到项目的设计中,能够大幅度减少后期的工作量。
中期系统调试阶段
如果前期系统验证也没问题,实际现场机器人节拍距离客户要求还差一些的情况下,通常可以参考以下的流程去考虑:
①设备整体的工艺及动作确认
机器人只是设备中的一个组成部分,因此我们需要从设备整体去考虑。一般在提速之前,首先熟悉设备整体的工艺流程及动作。我们需要确认设备在哪个部分有较长停留,在哪个部分可以改善。当完成这些改善后,设备整体的节拍提升上去之后,机器人提速也就不再是个问题。
②机器人的逻辑动作确认
我们不要急着去看机器人程序,而是观察机器人的整体动作。看一下哪些部分动作有些卡顿、哪些动作有些绕远甚至多余、然后哪些动作又有较多停留。当熟悉这些动作之后,对于后续节拍优化就大概心中有数。
③机器人程序参数优化
最后才是机器人的程序参数优化。我们可以同步结合上一步观察的结果,确认对应的程序段,然后进行有针对的优化。
后期改善提升阶段
此时,改善提升的空间已经不大。很多情况下是设备运行初期已经有所保留,比如只将机器人的运行速度设到了70%。此时我们只需要将运行速度提高,同时观察设备的稳定性,如果没有问题的话,基本上就完成了调试。
有些设备可能前期系统要求不高,设备即使低速下也能达到要求时,可能就不会进行各方面的优化调试。此时,在进行设备改善提升时,可以参考中期系统调试阶段的方法进行优化。
机器人程序参数优化方法
最后,以三菱工业机器人为例说明机器人程序参数优化方法。
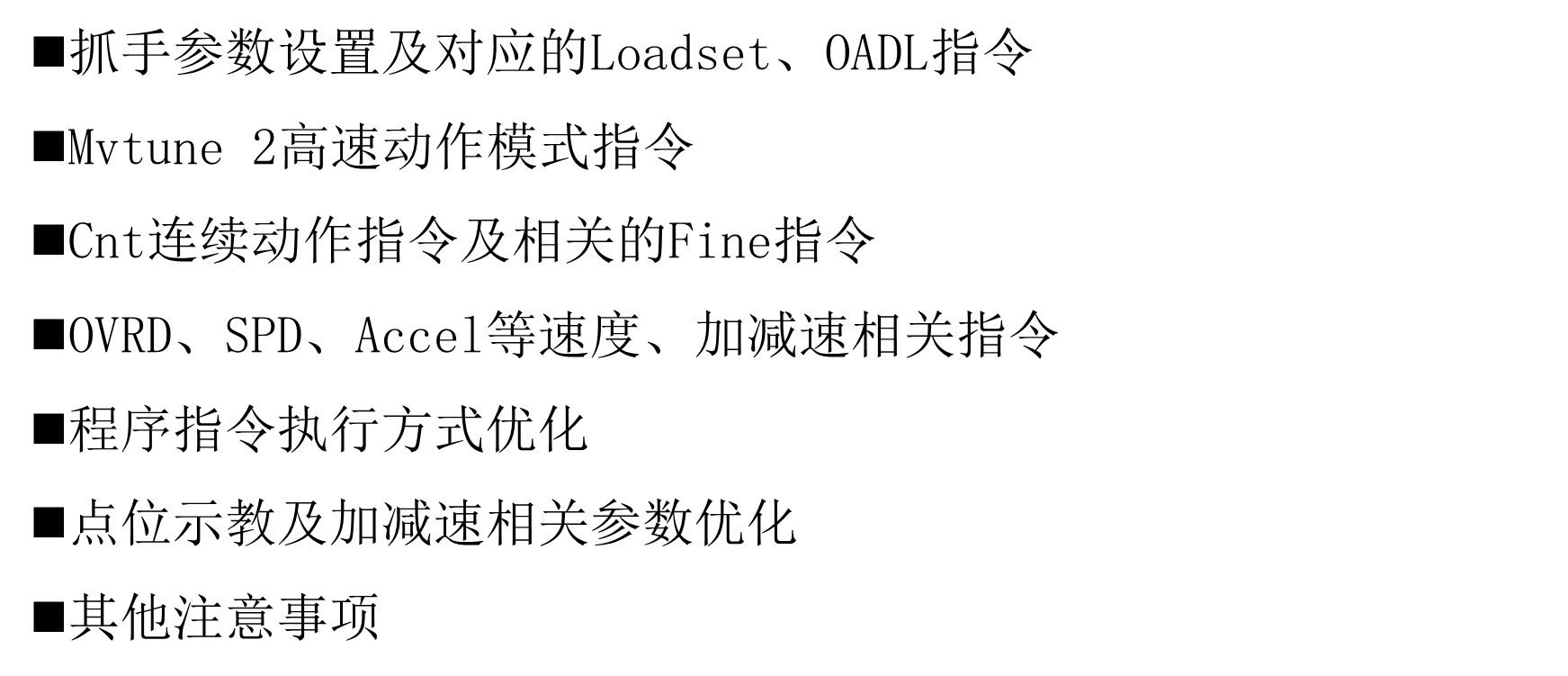
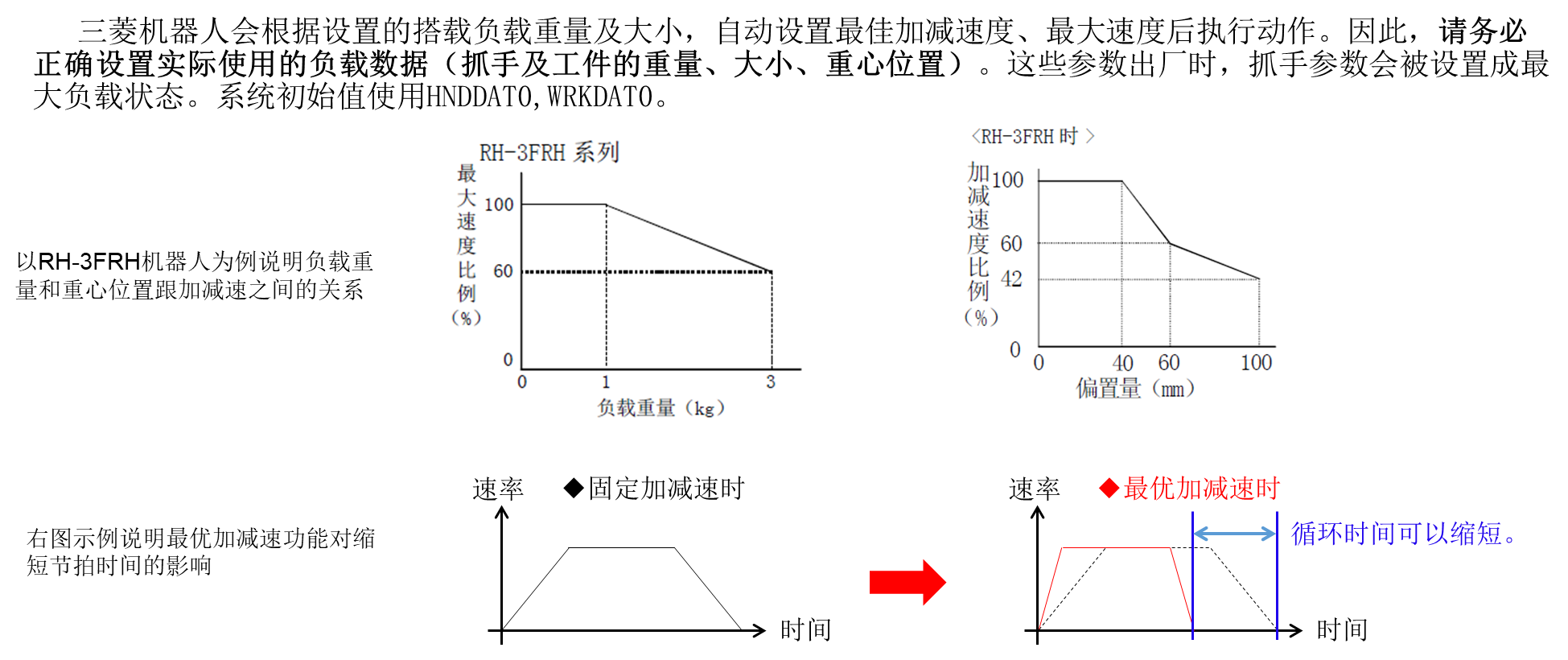
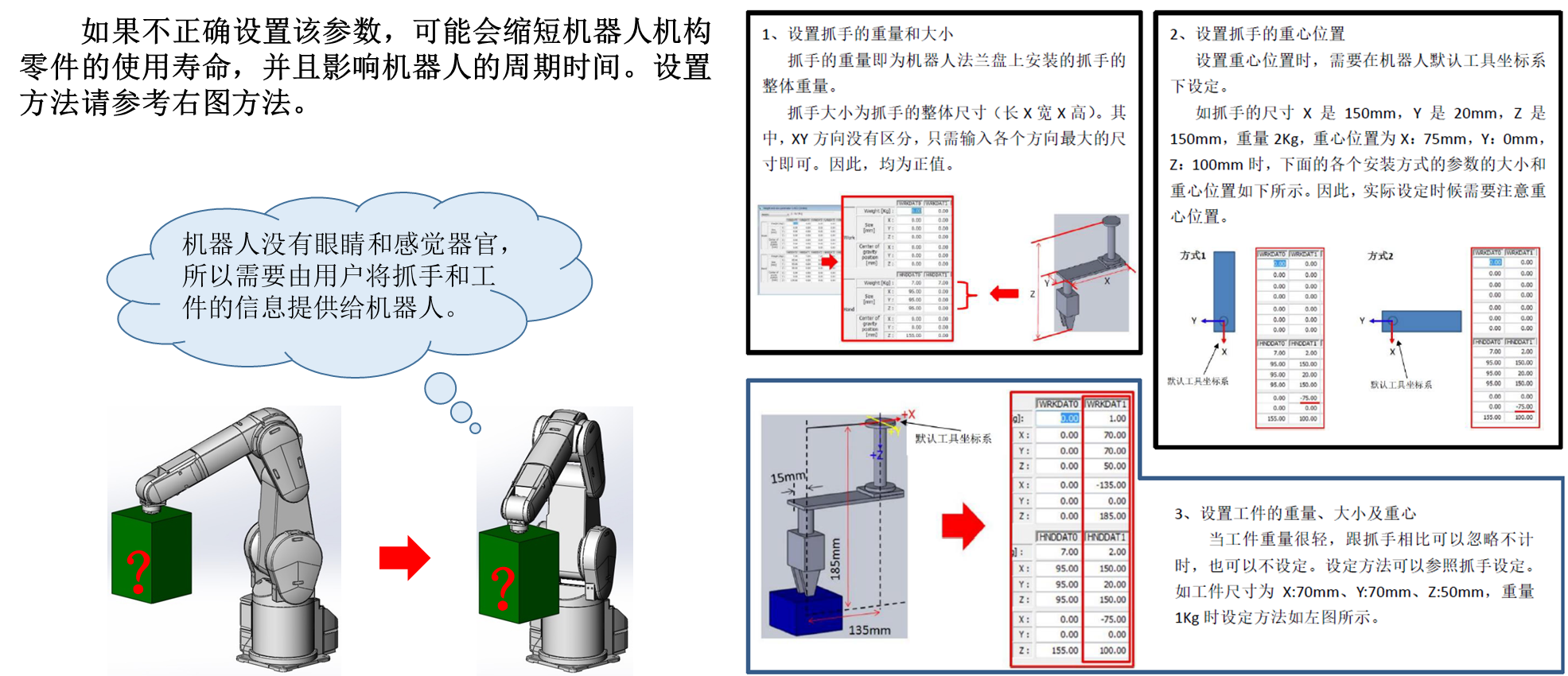
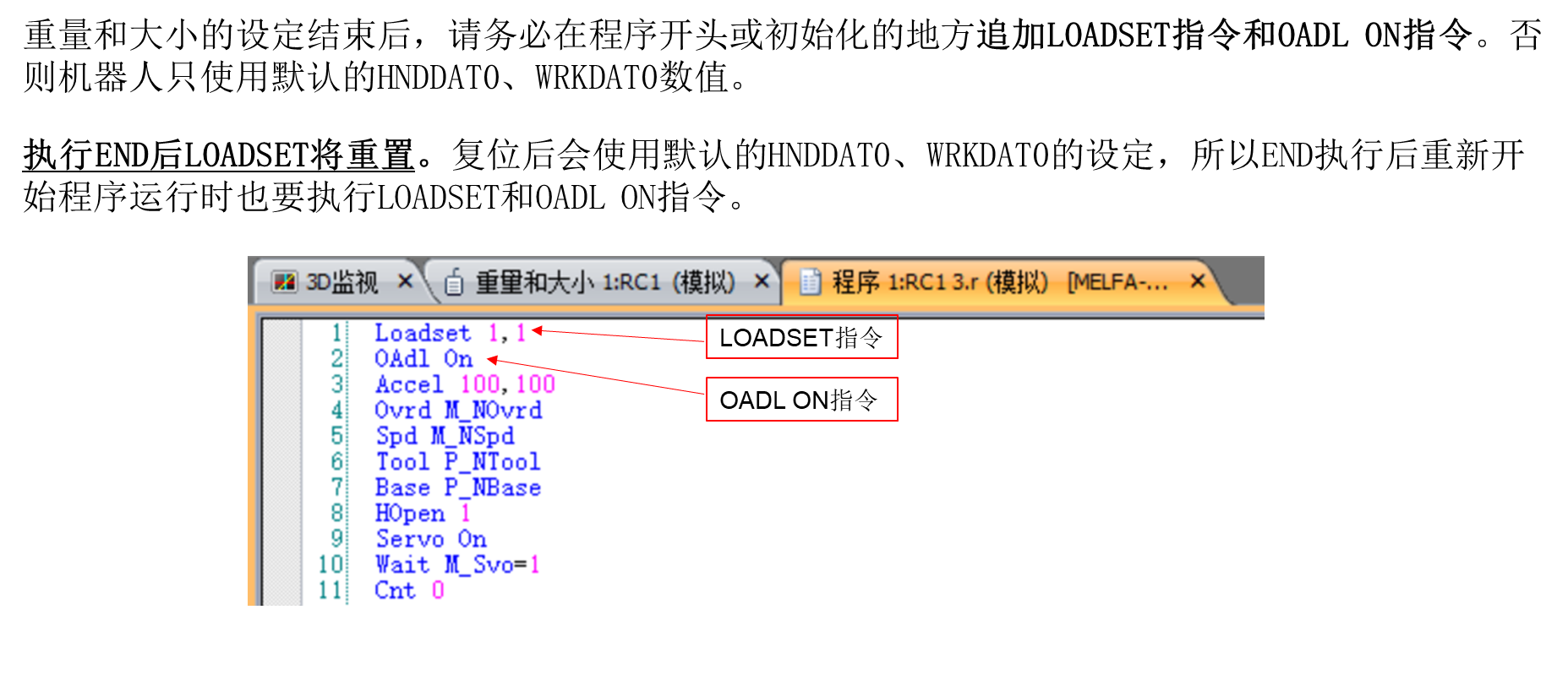
抓手参数设置及对应的Loadset、OADL指令
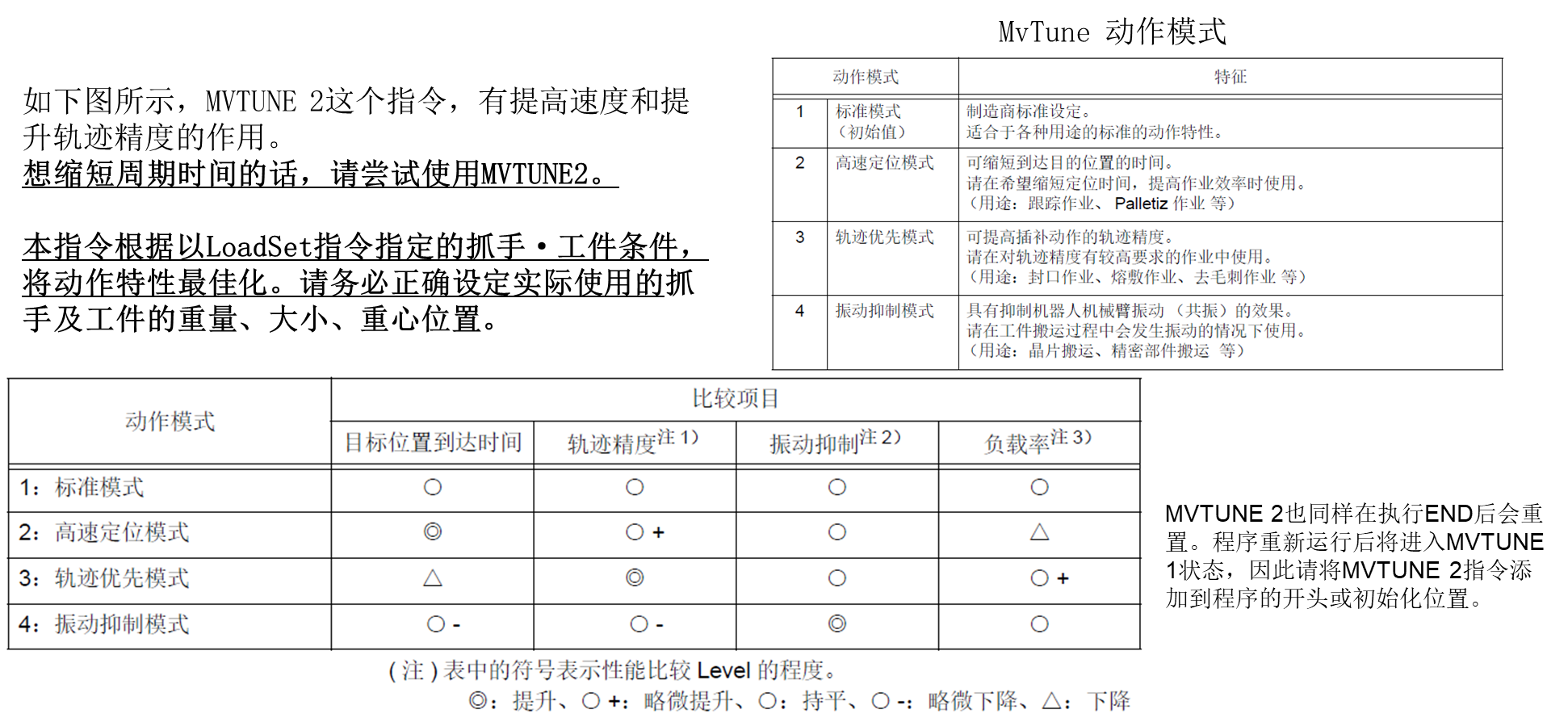
Mvtune 2高速动作模式指令
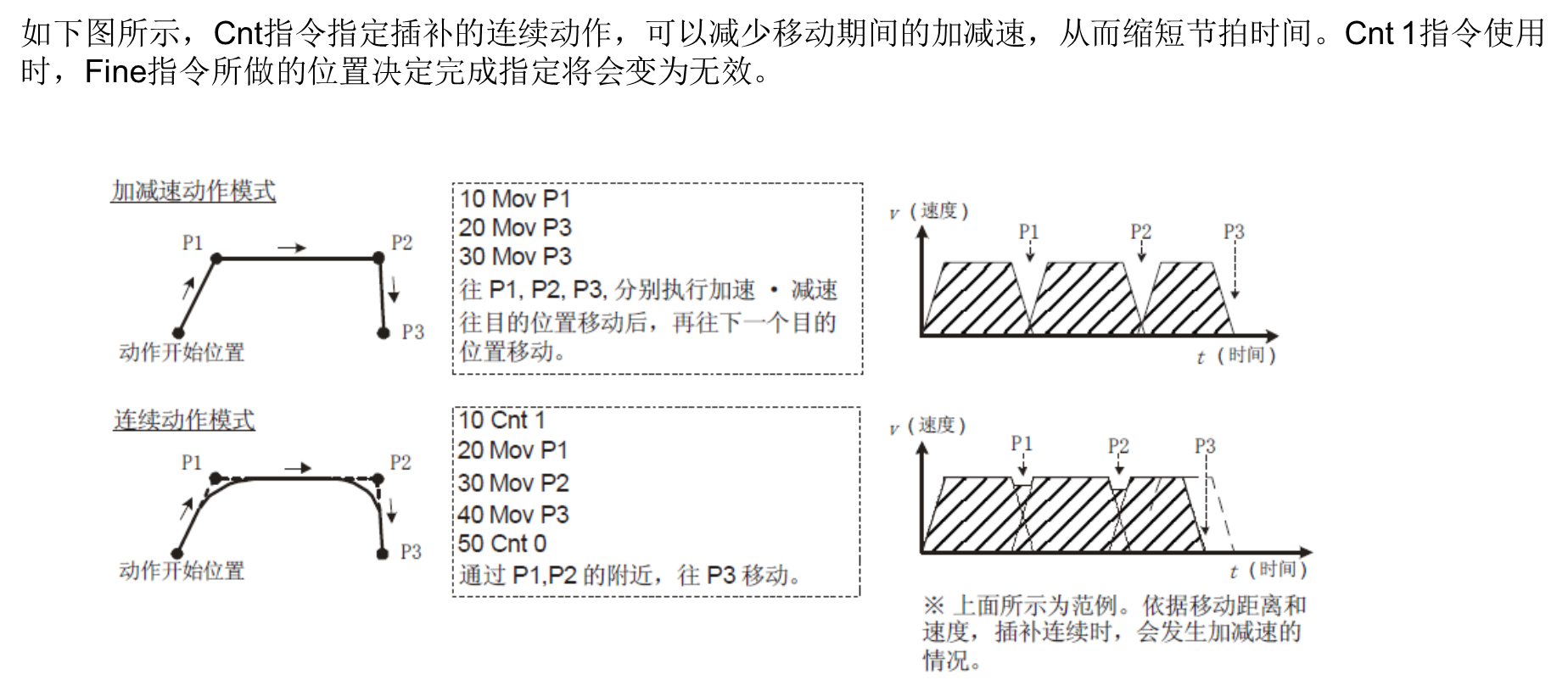
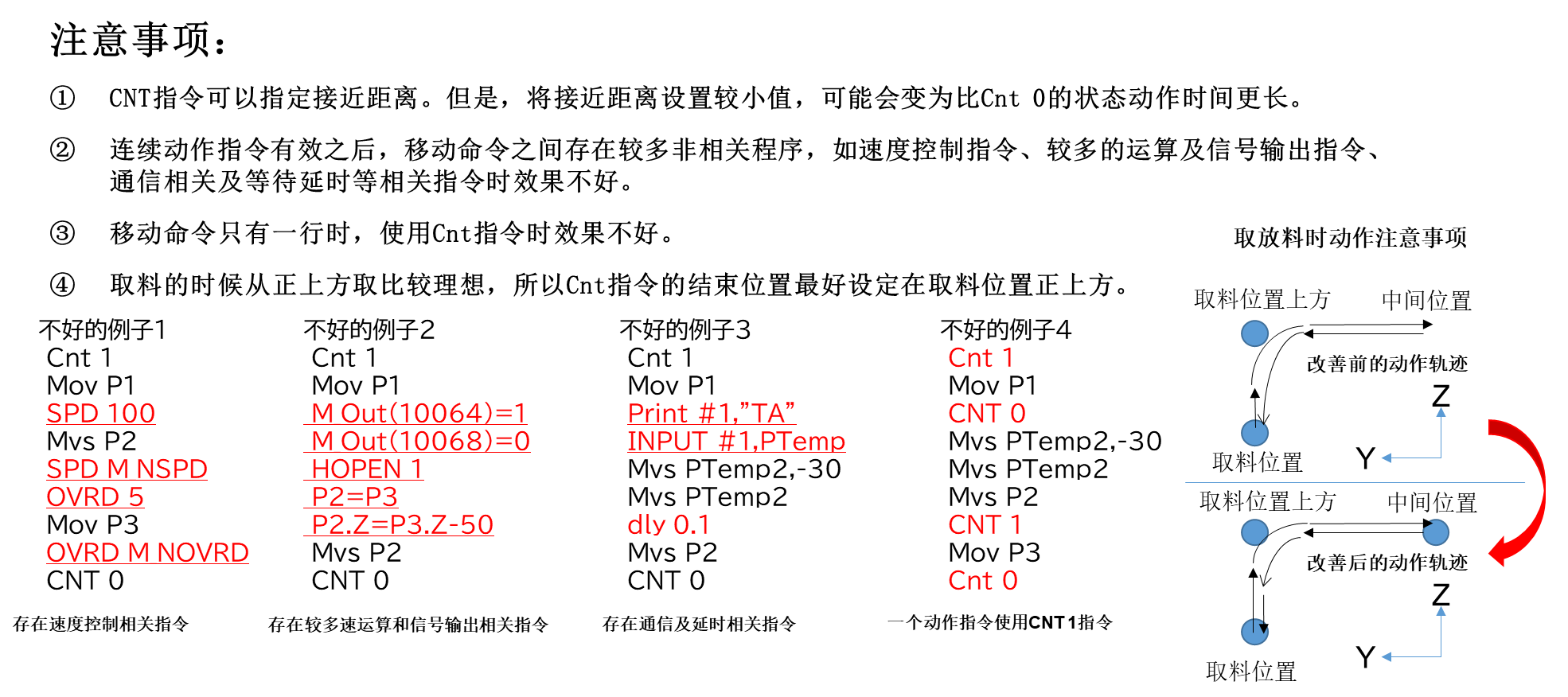
Cnt连续动作指令及相关的Fine指令
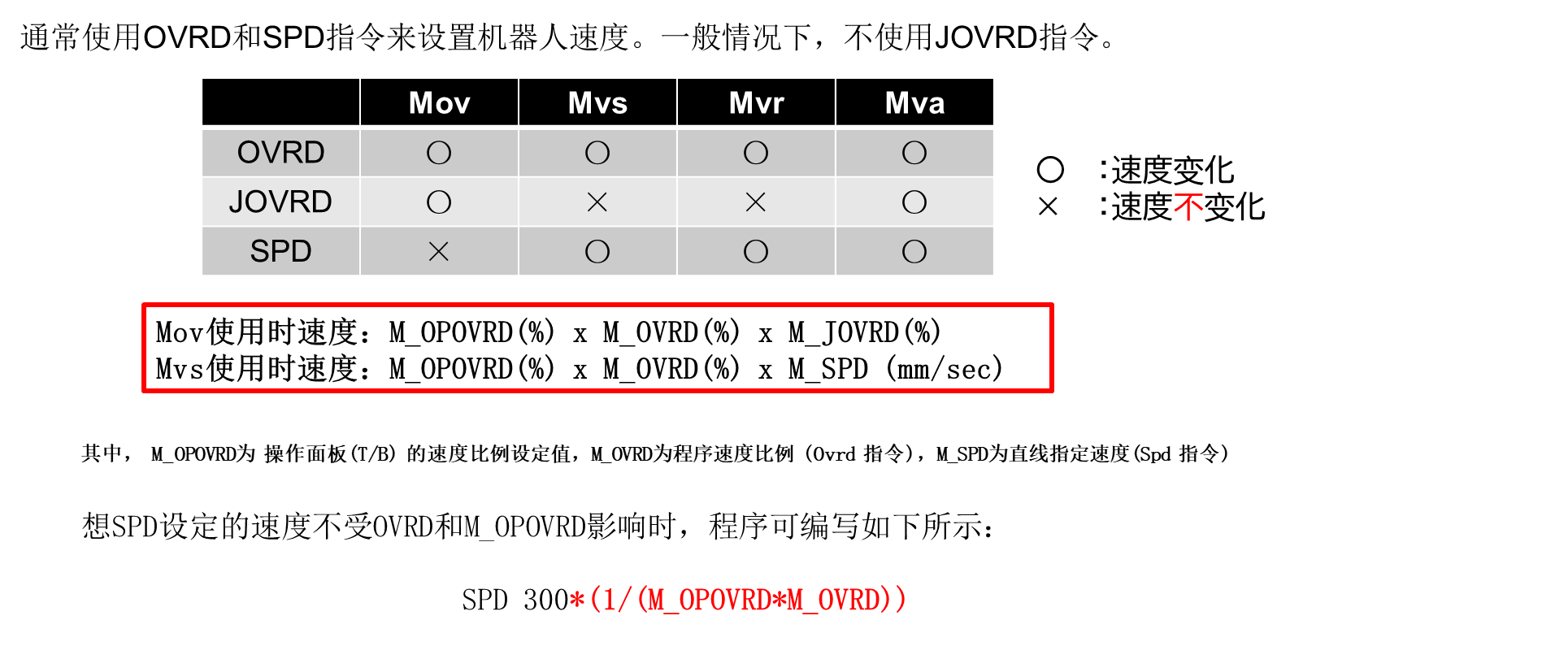
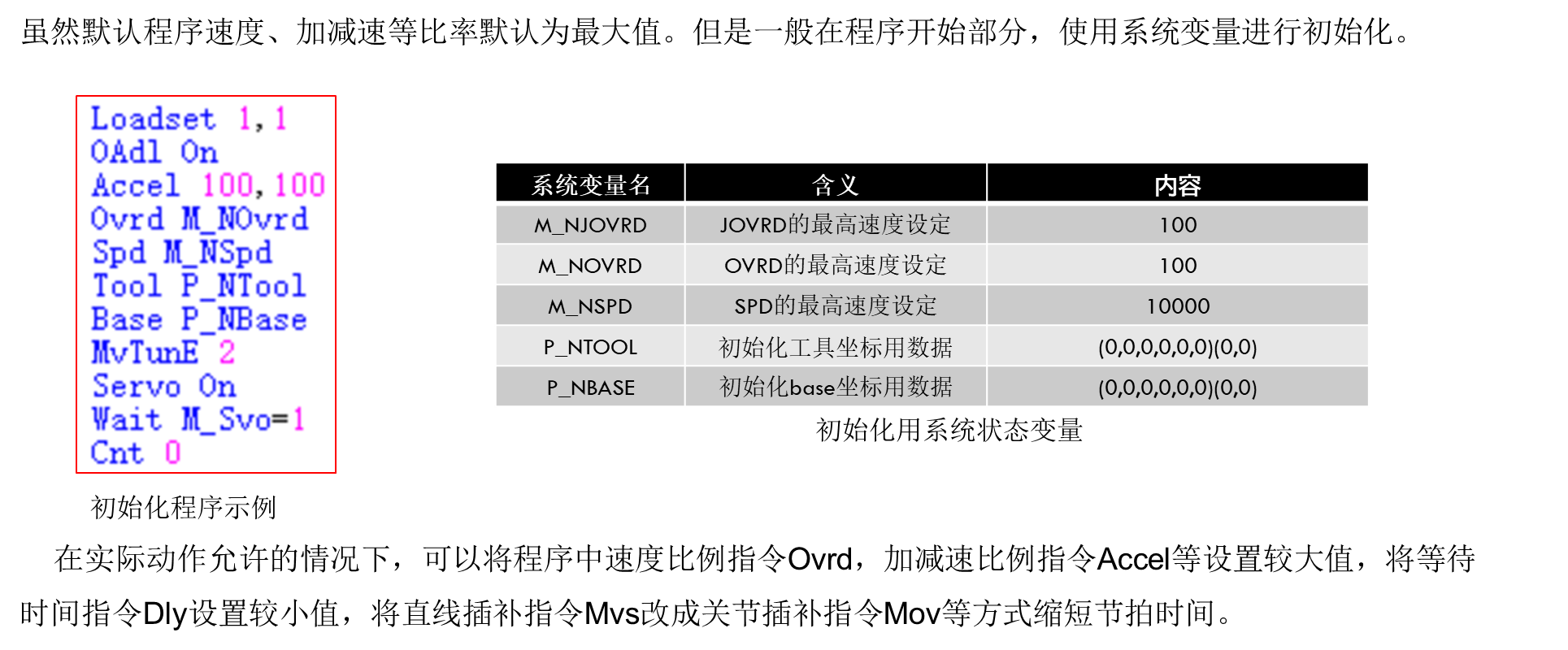
OVRD、SPD、Accel等速度、加减速相关指令
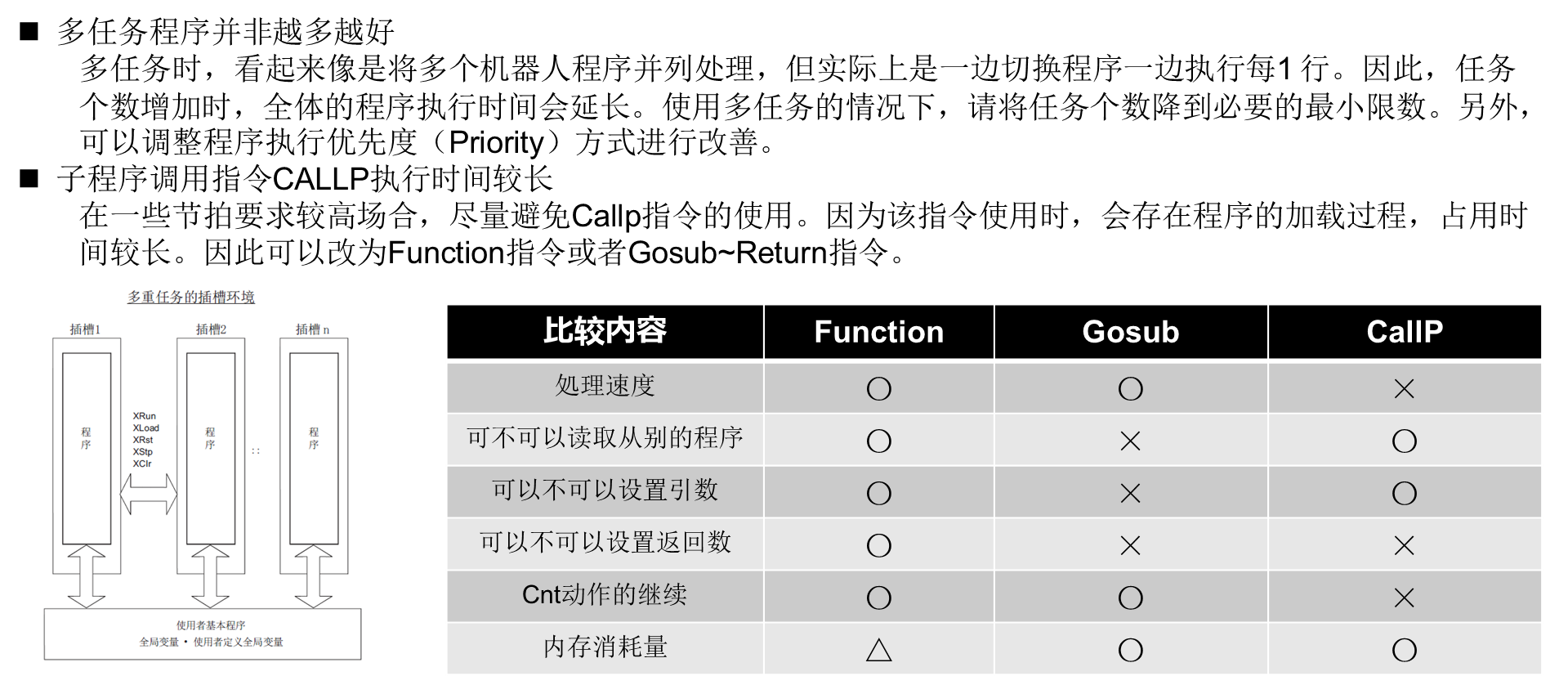
程序指令执行方式影响
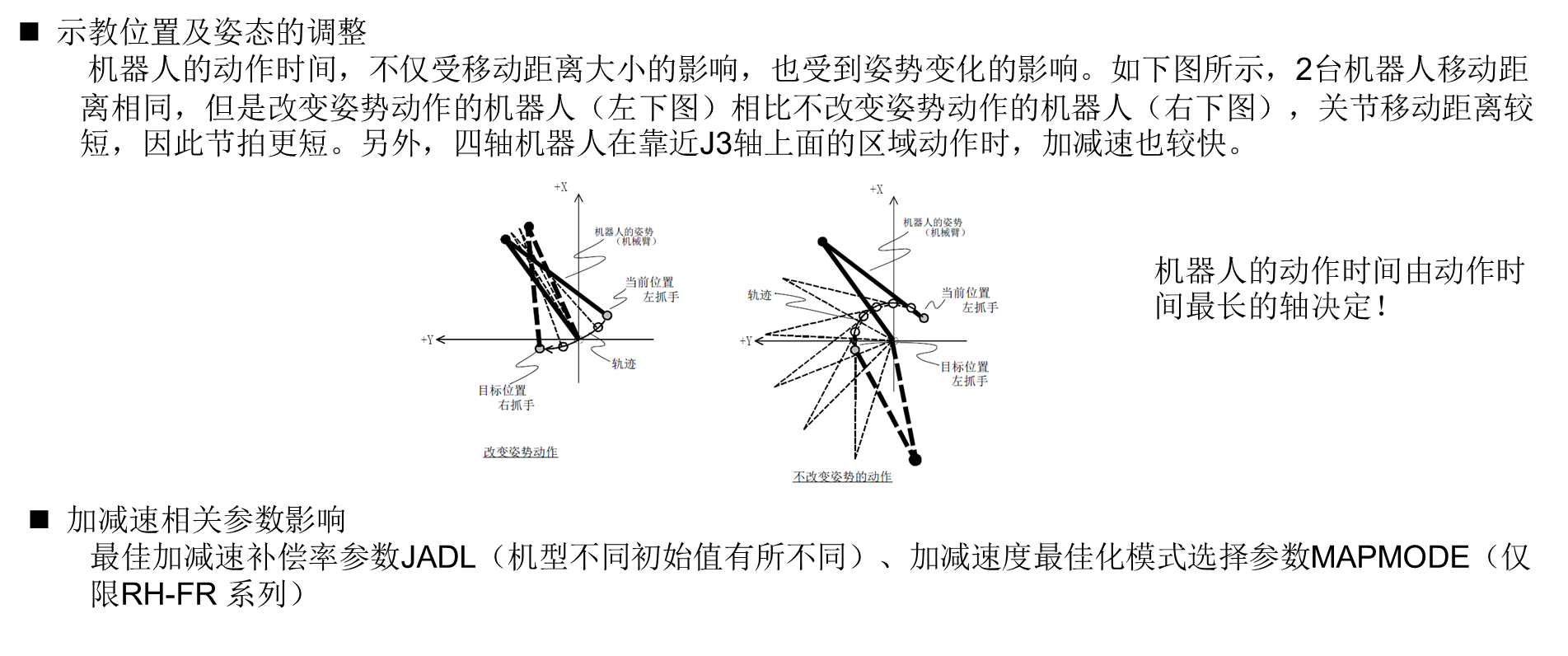
点位示教及加减速相关参数优化
 其他注意事项
其他注意事项


以上是机器人提速相关经验分享,希望对您有所帮助。

















 131
131

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









