






最早的相机成像原理是基于小孔成像原理,当代的相机则是基于透镜成像。
透镜成像可以更好地控制进光量等成像参数,但是也会因为透镜本身的原因带来图像畸变等现象,因此需要进行相机标定。
视觉系统中有四种坐标:像素坐标、图像平面坐标、摄像机坐标、世界坐标。
像素坐标:图像阵列中的位置(u,v)
图像平面坐标:场景点在图像平面上的投影,坐标以摄像机主点为原点,和像素坐标的原点位置不同。
摄像机坐标:以摄像机(观察者)为中心的三维坐标
世界坐标:绝对坐标系中的三维坐标
相机标定内容分为两部分:
1.标定从像素坐标系到世界坐标系需要的参数;
2.标定相机的畸变参数。
标定内容:
1.摄像机内参和外参
2.径向畸变参数
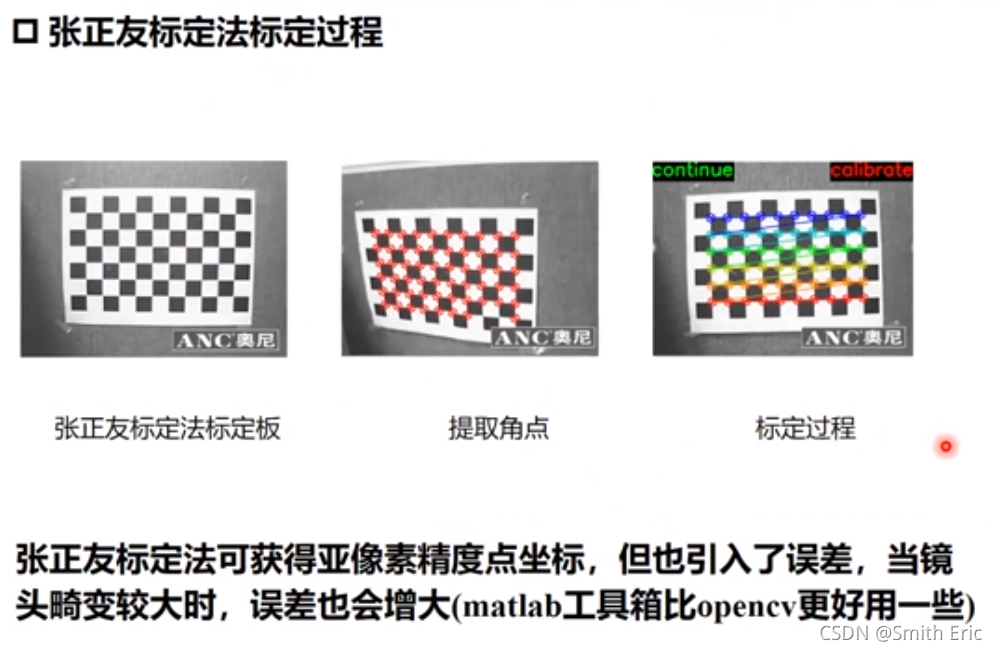
标定方法:张正友标定法(针对办公、家庭使用的桌面视觉系统(DVS)的标定)
特点:设备要求低、操作繁琐、鲁棒性高
条件:只需要相机在至少两个不同方向拍摄一张平面图案
实施步骤:
1.打印一张棋盘格A4纸(黑白间距已知),并贴在一个平板上
2.针对棋盘格拍摄若干张照片(10-20),至少两个方向。
3.在图片中检测特征点(Harris特征)
4.利用解析解估算方法计算出5个内部参数,以及6个外部参数
5.根据极大似然估计策略,设计优化目标并实现参数的优化。
以上的方法步骤在matlab和opencv之中均有集成。
参考
1.华中科技大学-机器人学
机器人学:建模、控制与视觉——华中科技大学_哔哩哔哩_bilibili https://www.bilibili.com/video/BV1x3411z7jQ?p=19
https://www.bilibili.com/video/BV1x3411z7jQ?p=19


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









