








笔者为了更好的实现对仿生机械手的控制,通过串口指令来对仿生机械手从控制板的工作模式配置。如下表:
| 工作模式 | 模式指令 | 手指/手势指令 | xxx范围 |
| 无线模式 | Set_Wireless_Mode | Set_Steering_Thumb_xxx | 185-193 |
| 舵机模式 | Set_Steering_Mode | Set_Steering_Index_xxx | 179-192 |
| 手势模式 | Set_Gesture_Mode | Set_Steering_Middle_xxx | 183-195 |
| 复位模式 | Set_NRST_Mode | Set_Steering_Ring_xxx | 181-192 |
| 自检模式 | Set_Check_Mode | Set_Steering_Little_xxx | 180-190 |
| 校准模式 | Set_Calibration_Mode | Set_Gesture_xxx | 000-011 |
仿生机械手操作指令集表
串口配置界面
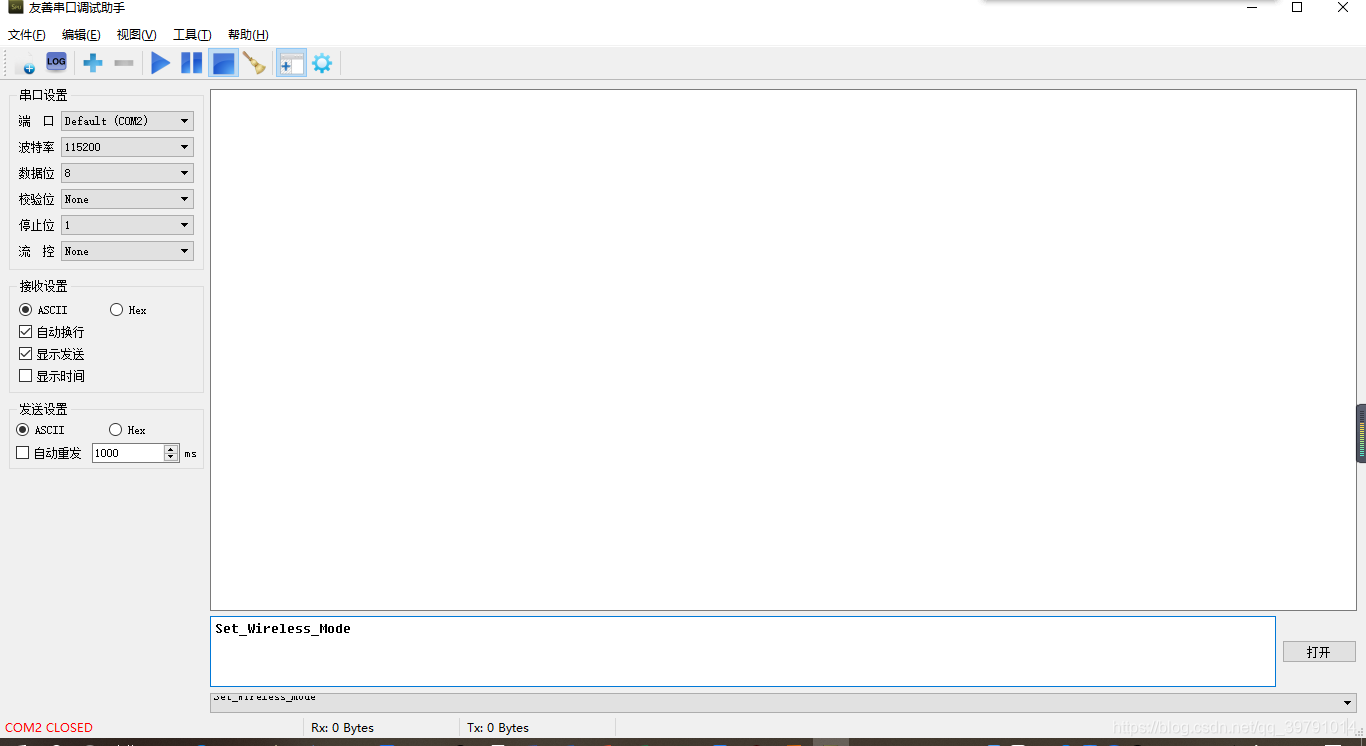
端口:选择与控制板对应的COM
串口波特率:115200
数据位:8
校验位:None
停止位:1
流控:None
发送设置与接收设置都选择ASCII,在发射缓冲区发送指令的末端必须回车换行,否则下发指令控制板无响应。
无线模式配置流程如下:
1. Set_NRST_Mode--复位控制板,保证控制板处于复位状态。
2. Set_Wireless_Mode--配置控制板为无线控制模式
3. 控制板按键选择接收模式
无线体感仿生机械手之数据手套远程操控仿生机械手测试视频















 1090
1090











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











