







非标协议外设(lcd1602显示和dht11温湿度传感器)
一. LCD1602显示
1.1 简介

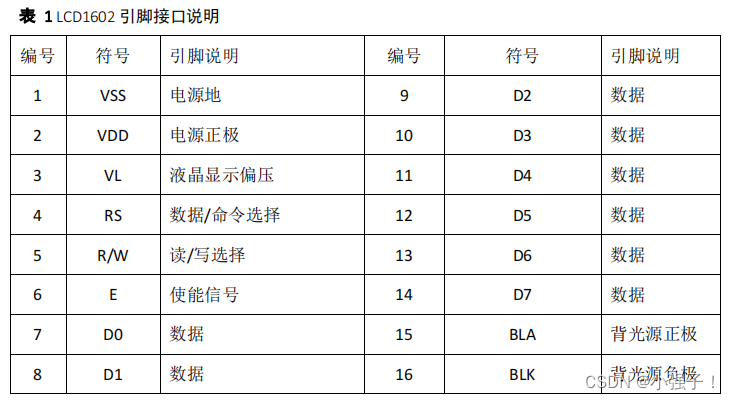
这块挑几个重点的讲解:
- 第 4 脚:RS 为寄存器选择,高电平时选择数据寄存器、低电平时选择==指令(选地址)==寄存器。
- 第 5 脚:R/W 为读写信号线,高电平时进行读操作,低电平时进行写操作。当 RS 和 R/W 共同为低电平时可以写入指令或者显示地址,当 RS 为低电平 R/W 为高电平时可以读忙信号,当== RS 为高电平 R/W 为低电平时可以写入数据==。
- 第 6 脚:E 端为使能端,当 E 端由高电平跳变成低电平时,液晶模块执行命令。
- 指令 9:读忙信号和光标地址。 BF:为忙标志位,高电平表示忙,此时模块不能接收命令或
者数据,如果为低电平表示不忙。
| RS | R/W | 操作 |
|---|---|---|
| 低电平 | 低电平 | 写入指令或显示地址 |
| 低电平 | 高电平 | 读忙信号 |
| 高电平 | 低电平 | 写入数据 |
1.2 开发过程
该模块我们需要弄清楚两件事情:1.在哪显示 2.显示什么
- 在哪显示
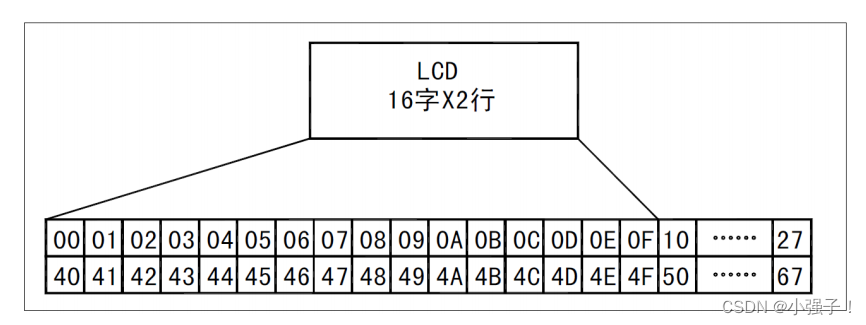
例如第二行第一个字符的地址是 40H,那么是否直接写入 40H 就可以将光标定位在第二行第一个字符的位置呢?
这样不行,因为==写入显示地址时要求最高位 D7 恒定为高电平 1 ==所以实际写入的数据应该是 01000000B(40H) +10000000B(80H)=11000000B(C0H)

- 显示什么
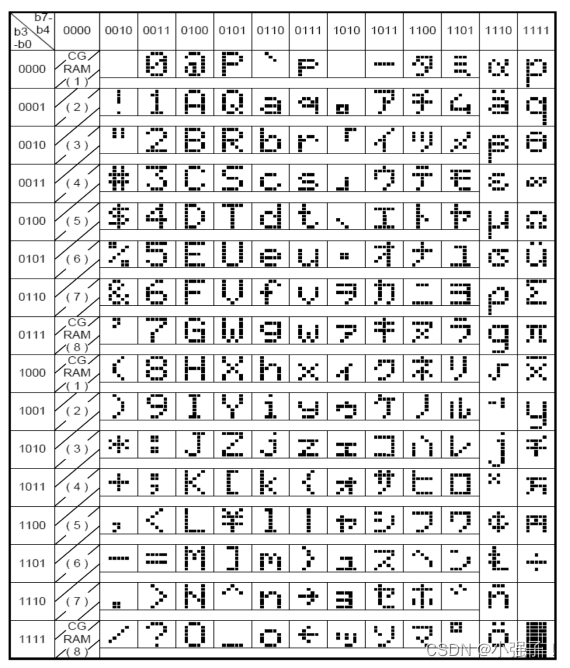
其实本质就是ASII码。
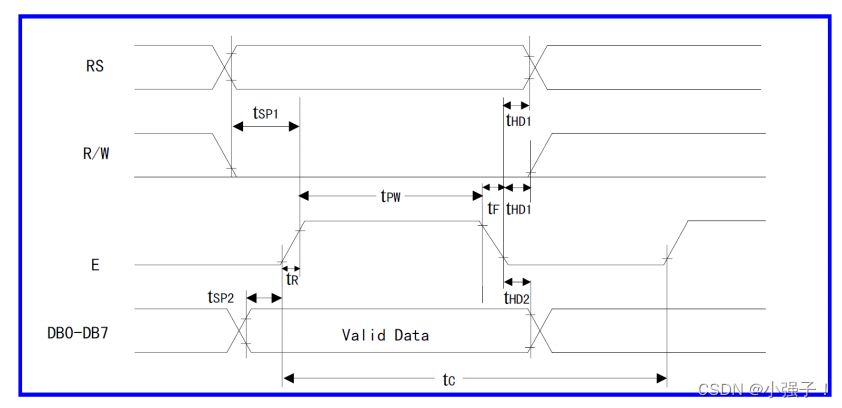
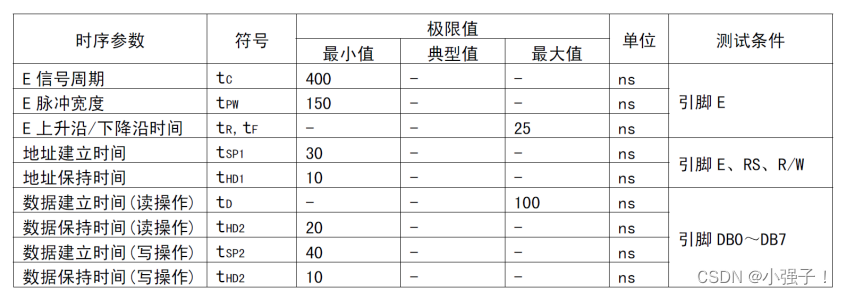
1.2 读写时序
RS=1–数据(内容) RS=0–指令(地址)
读操作时序
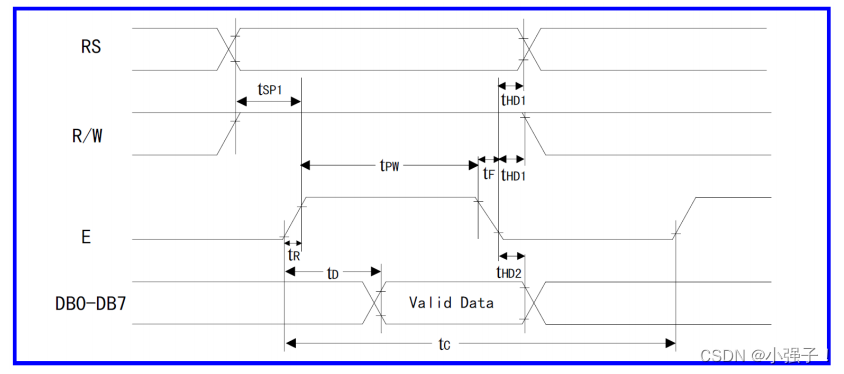
写操作
- 写指令代码
void Write_Cmd_Func(char cmd)
{
RS = 0;
RW = 0;
EN = 0;
_nop_();
databuffer = cmd;
EN = 1;
_nop_();
_nop_();
EN = 0;
_nop_();
}
- 写数据代码
void Write_Data_Func(char dataShow)
{
RS = 1;
RW = 0;
EN = 0;
_nop_();
databuffer = dataShow;
EN = 1;
_nop_();
_nop_();
EN = 0;
_nop_();
}
1.3 显示一个字符
#include <reg52.h>
#include <intrins.h>
#define databuffer P0
sbit RS = P1^0;
sbit RW = P1^1;
sbit EN = P1^4;
void Write_Cmd_Func(char cmd)
{
RS = 0;
RW = 0;
EN = 0;
_nop_();
databuffer = cmd;
EN = 1;
_nop_();
_nop_();
EN = 0;
_nop_();
}
void Write_Data_Func(char dataShow)
{
RS = 1;
RW = 0;
EN = 0;
_nop_();
databuffer = dataShow;
EN = 1;
_nop_();
_nop_();
EN = 0;
_nop_();
}
void Delay15ms() //@11.0592MHz
{
unsigned char i, j;
i = 27;
j = 226;
do
{
while (--j);
} while (--i);
}
void Delay5ms() //@11.0592MHz
{
unsigned char i, j;
i = 9;
j = 244;
do
{
while (--j);
} while (--i);
}
void LCD1602_INIT()
{
//(1)延时 15ms
Delay15ms();
//(2)写指令 38H(不检测忙信号)
Write_Cmd_Func(0x38);
//(3)延时 5ms
Delay5ms();
//(4)以后每次写指令,读/写数据操作均需要检测忙信号
//(5)写指令 38H:显示模式设置
Write_Cmd_Func(0x38);
//(6)写指令 08H:显示关闭
Write_Cmd_Func(0x08);
//(7)写指令 01H:显示清屏
Write_Cmd_Func(0x01);
//(8)写指令 06H:显示光标移动设置
Write_Cmd_Func(0x06);
//(9)写指令 0CH:显示开及光标设置}
Write_Cmd_Func(0x0c);
}
void main()
{
char pposition = 0x80 + 0x05;//0x80为硬件要求必加的
char dataShow = 'C';
Write_Cmd_Func(pposition);//选择要显示的地址
Write_Data_Func(dataShow);//发送要显示的字符
}
1.4 检测忙信号(读数据)


void check_busy()
{
char tmp = 0x80;
databuffer = 0x80;
while(tmp & 0x80){ //
RS = 0;
RW = 1;
EN = 0;
_nop_();
EN = 1;
_nop_();
_nop_();
tmp = databuffer;
EN = 0;
_nop_();
}
}
完整代码:
#include <reg52.h>
#include <intrins.h>
#define databuffer P0
sbit RS = P1^0;
sbit RW = P1^1;
sbit EN = P1^4;
void check_busy()
{
//这是硬件检测端口 硬件改变 ,就会变 只是刚开始是0x80
char tmp = 0x80;
databuffer = 0x80;
while(tmp & 0x80){ //
RS = 0;
RW = 1;
EN = 0;
_nop_();
EN = 1;
_nop_();
_nop_();
tmp = databuffer;
EN = 0;
_nop_();
}
}
void Write_Cmd_Func(char cmd)
{
check_busy();
RS = 0;
RW = 0;
EN = 0;
_nop_();
databuffer = cmd;
EN = 1;
_nop_();
_nop_();
EN = 0;
_nop_();
}
void Write_Data_Func(char dataShow)
{
check_busy();
RS = 1;
RW = 0;
EN = 0;
_nop_();
databuffer = dataShow;
EN = 1;
_nop_();
_nop_();
EN = 0;
_nop_();
}
void Delay15ms() //@11.0592MHz
{
unsigned char i, j;
i = 27;
j = 226;
do
{
while (--j);
} while (--i);
}
void Delay5ms() //@11.0592MHz
{
unsigned char i, j;
i = 9;
j = 244;
do
{
while (--j);
} while (--i);
}
void LCD1602_INIT()
{
//(1)延时 15ms
Delay15ms();
//(2)写指令 38H(不检测忙信号)
Write_Cmd_Func(0x38);
//(3)延时 5ms
Delay5ms();
//(4)以后每次写指令,读/写数据操作均需要检测忙信号
check_busy();
//(5)写指令 38H:显示模式设置
Write_Cmd_Func(0x38);
//(6)写指令 08H:显示关闭
Write_Cmd_Func(0x08);
//(7)写指令 01H:显示清屏
Write_Cmd_Func(0x01);
//(8)写指令 06H:显示光标移动设置
Write_Cmd_Func(0x06);
//(9)写指令 0CH:显示开及光标设置}
Write_Cmd_Func(0x0c);
}
void main()
{
char pposition = 0x80 + 0x05;//0x80为硬件要求必加的
char dataShow = 'C';
LCD1602_INIT();
Write_Cmd_Func(pposition);//选择要显示的地址
Write_Data_Func(dataShow);//发送要显示的字符
}
1.5 显示一行
#include <reg52.h>
#include <intrins.h>
#define databuffer P0
sbit RS = P1^0;
sbit RW = P1^1;
sbit EN = P1^4;
void check_busy()
{
char tmp = 0x80;
databuffer = 0x80;
while(tmp & 0x80){ //
RS = 0;
RW = 1;
EN = 0;
_nop_();
EN = 1;
_nop_();
_nop_();
tmp = databuffer;
EN = 0;
_nop_();
}
}
void Write_Cmd_Func(char cmd)
{
check_busy();
RS = 0;
RW = 0;
EN = 0;
_nop_();
databuffer = cmd;
EN = 1;
_nop_();
_nop_();
EN = 0;
_nop_();
}
void Write_Data_Func(char dataShow)
{
check_busy();
RS = 1;
RW = 0;
EN = 0;
_nop_();
databuffer = dataShow;
EN = 1;
_nop_();
_nop_();
EN = 0;
_nop_();
}
void Delay15ms() //@11.0592MHz
{
unsigned char i, j;
i = 27;
j = 226;
do
{
while (--j);
} while (--i);
}
void Delay5ms() //@11.0592MHz
{
unsigned char i, j;
i = 9;
j = 244;
do
{
while (--j);
} while (--i);
}
void LCD1602_INIT()
{
//(1)延时 15ms
Delay15ms();
//(2)写指令 38H(不检测忙信号)
Write_Cmd_Func(0x38);
//(3)延时 5ms
Delay5ms();
//(4)以后每次写指令,读/写数据操作均需要检测忙信号
check_busy();
//(5)写指令 38H:显示模式设置
Write_Cmd_Func(0x38);
//(6)写指令 08H:显示关闭
Write_Cmd_Func(0x08);
//(7)写指令 01H:显示清屏
Write_Cmd_Func(0x01);
//(8)写指令 06H:显示光标移动设置
Write_Cmd_Func(0x06);
//(9)写指令 0CH:显示开及光标设置}
Write_Cmd_Func(0x0c);
}
void LCD1602_showLine(char row,char col,char *string)
{
switch(row){
case 1:
Write_Cmd_Func(0x80 + col);
while(*string){
Write_Data_Func(*string);
string++;
}
break;
case 2:
Write_Cmd_Func(0x80 + 0x40 + col);
while(*string){
Write_Data_Func(*string);
string++;
}
break;
}
}
void main()
{
LCD1602_INIT();
LCD1602_showLine(1,5,"NO.1");
LCD1602_showLine(2,0,"jiayou");
}
二. DHT11温湿度传感器
2.1 简介
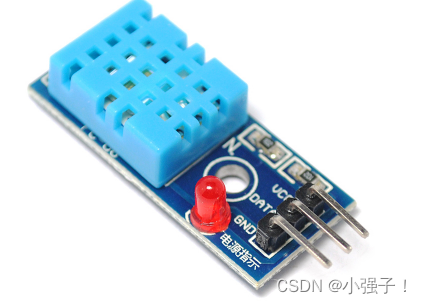
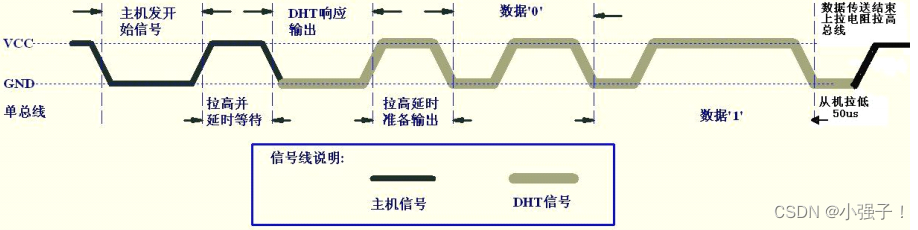
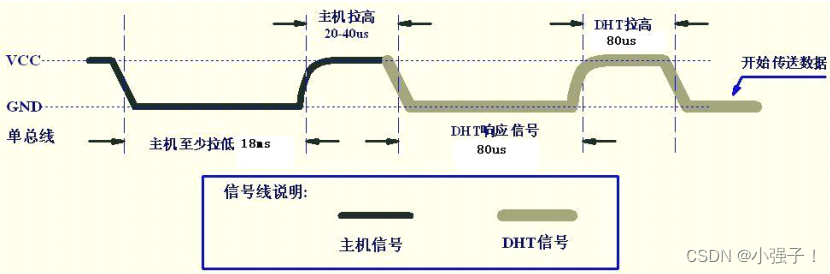
- 数据传送逻辑
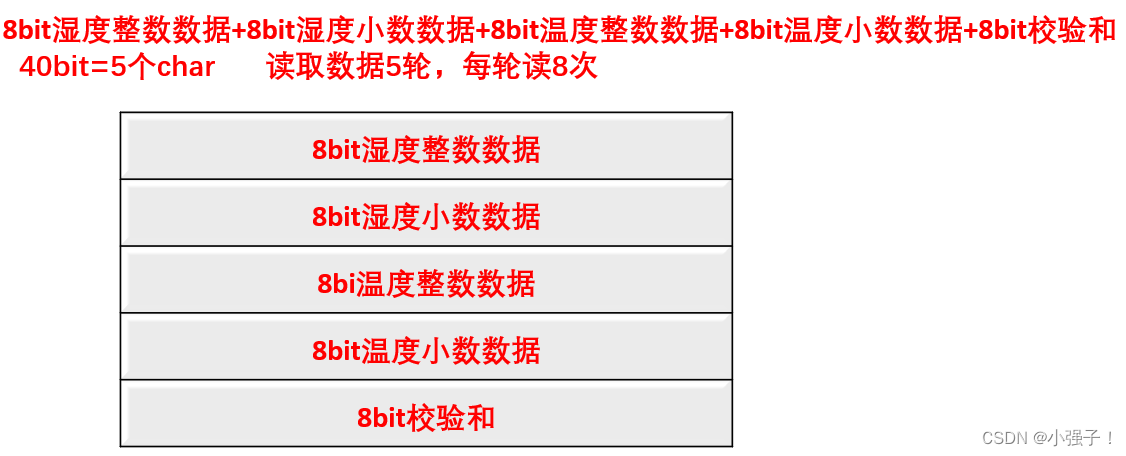
只有一根数据线DATA,上官一号发送序列指令给DHT11模块,模块一次完整的数据传输为40bit,高位先
出 - 数据格式
8bit湿度整数数据+8bit湿度小数数据+8bi温度整数数据+8bit温度小数数据+8bit校验和
2.2 检测模块是否存在
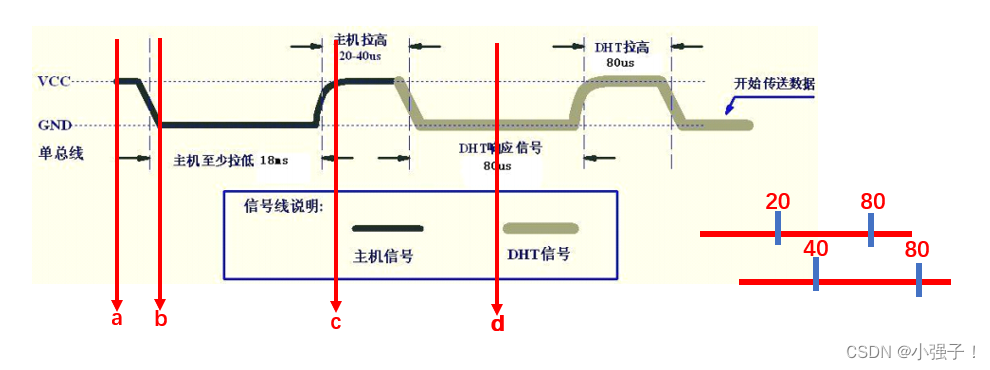
a : dht = 1
b :dht = 0
延时30ms
c: dht = 1
在60us后读d点,如果d点是低电平(被模块拉低),说明模块存在!
void check_DTH()
{
// a : dht = 1
dht = 1;
// b :dht = 0
dht = 0;
// 延时30ms
Delay30ms();
// c: dht = 1
dht = 1;
// 在60us后读d点,如果d点是低电平(被模块拉低),说明模块存在!
Delay60us();
if(dht == 0){
led1 = 0;//亮灯,说明模块存在
}
}
使用led灯显示是否存在模块
#include <reg52.h>
#include <intrins.h>
sbit led1 = P3^7;
sbit dht = P3^3;//模块的data插在p3.3
void Delay30ms() //@11.0592MHz
{
unsigned char i, j;
i = 54;
j = 199;
do
{
while (--j);
} while (--i);
}
void Delay60us() //@11.0592MHz
{
unsigned char i;
i = 25;
while (--i);
}
void Delay1000ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 8;
j = 1;
k = 243;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void check_DTH()
{
// a : dht = 1
dht = 1;
// b :dht = 0
dht = 0;
// 延时30ms
Delay30ms();
// c: dht = 1
dht = 1;
// 在60us后读d点,如果d点是低电平(被模块拉低),说明模块存在!
Delay60us();
if(dht == 0){
led1 = 0;//亮灯,说明模块存在
}
}
void main()
{
led1 = 1;
Delay1000ms();
Delay1000ms();
check_DTH();
while(1);
}
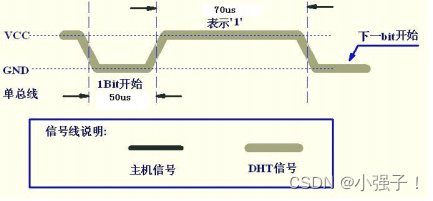
2.3 读取数据时序
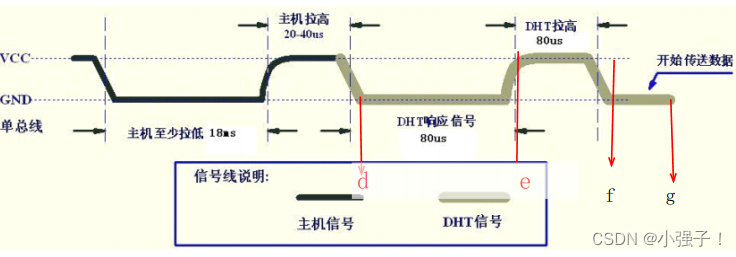
卡d点;while(dht1);
卡e点 while(!dht)
卡f点:while(dht)
卡g点:while(!dht) 有效数据都是高电平,持续时间不一样,50us读,低电平0 高电平
DHT11传输0的时序分析
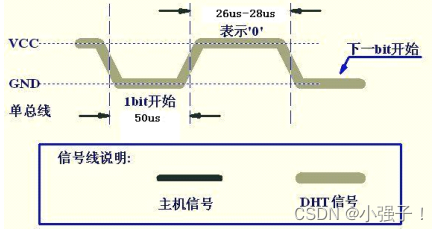
DHT11传输1的时序分析
2.4 时序代码
#include <reg52.h>
#include <intrins.h>
sbit led1 = P3^7;
sbit dht = P3^3;//模块的data插在p3.3
char datas[5];
void Delay30ms() //@11.0592MHz
{
unsigned char i, j;
i = 54;
j = 199;
do
{
while (--j);
} while (--i);
}
void Delay60us() //@11.0592MHz
{
unsigned char i;
i = 25;
while (--i);
}
void Delay1000ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 8;
j = 1;
k = 243;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void DHT11_Start()
{
// a : dht = 1
dht = 1;
// b :dht = 0
dht = 0;
// 延时30ms
Delay30ms();
// c: dht = 1
dht = 1;
// 卡d点;while(dht1);
while(dht);
// 卡e点 while(!dht)
while(!dht)
// 卡f点:while(dht)
while(dht);
}
void Read_Data_From_DHT()
{
int i;//轮
int j;//每一轮多少次
char tmp;
char flag;
DHT11_Start();
for(i=0;i<5;i++){
//卡g点:while(!dht) 有效数据都是高电平,持续时间不一样,50us读,低电平0 高电平
for(j=0;j<8;j++){
while(!dht);//等待卡g点
Delay60us();
if(dht == 1){
flag = 1;
while(dht);
}else{
flag = 0;
}
tmp = tmp << 1;
tmp |= flag;
}
datas[i] = tmp;
}
}
void main()
{
led1 = 1;
Delay1000ms();
Delay1000ms();
while(1){
Delay1000ms();
Read_Data_From_DHT();
}
}
2.5 结合串口查看数据
#include "reg52.h"
#include "intrins.h"
sbit ledOne = P3^7;
sbit dht = P3^3;//模块的data插在p3.3
char datas[5];
sfr AUXR = 0x8E;
void UartInit(void) //9600bps@11.0592MHz
{
AUXR = 0x01;
SCON = 0x40; //配置串口工作方式1,REN不使能接收
TMOD &= 0xF0;
TMOD |= 0x20;//定时器1工作方式位8位自动重装
TH1 = 0xFD;
TL1 = 0xFD;//9600波特率的初值
TR1 = 1;//启动定时器
}
void sendByte(char data_msg)
{
SBUF = data_msg;
while(!TI);
TI = 0;
}
void sendString(char* str)
{
while( *str != '\0'){
sendByte(*str);
str++;
}
}
void Delay30ms() //@11.0592MHz
{
unsigned char i, j;
i = 54;
j = 199;
do
{
while (--j);
} while (--i);
}
void Delay60us() //@11.0592MHz
{
unsigned char i;
i = 25;
while (--i);
}
void Delay1000ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 8;
j = 1;
k = 243;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void DHT11_Start()
{
dht = 1;
dht = 0;
//延时30ms
Delay30ms();
dht = 1;
//卡d点;while(dht1); 卡e点 while(!dht) 卡f点:while(dht)
while(dht);
while(!dht);
while(dht);
}
void Delay40us() //@11.0592MHz
{
unsigned char i;
_nop_();
i = 15;
while (--i);
}
void Read_Data_From_DHT()
{
int i;//轮
int j;//每一轮读多少次
char tmp;
char flag;
DHT11_Start();
for(i= 0;i < 5;i++){
//卡g点:while(!dht) 有效数据都是高电平,持续时间不一样,50us读,低电平0 高电平
for(j=0;j<8;j++){
while(!dht);//等待卡g点
Delay40us();
if(dht == 1){
flag = 1;
while(dht);
}else{
flag = 0;
}
tmp = tmp << 1;
tmp |= flag;
}
datas[i] = tmp;
}
}
void main()
{
ledOne = 1;
UartInit();
Delay1000ms();
Delay1000ms();
while(1){
Delay1000ms();
Read_Data_From_DHT();
sendString("H:");
sendByte(datas[0]/10 + 0x30);//43 a
sendByte(datas[0]%10 + 0x30);
sendByte('.');
sendByte(datas[1]/10 + 0x30);//43 a
sendByte(datas[1]%10 + 0x30);
sendString("\r\n");
sendString("T:");
sendByte(datas[2]/10 + 0x30);//43 a
sendByte(datas[2]%10 + 0x30);
sendByte('.');
sendByte(datas[3]/10 + 0x30);//43 a
sendByte(datas[3]%10 + 0x30);
sendString("\r\n");
}
}
2.6 结合蓝牙模块和LCD1602模块显示温湿度
#include "reg52.h"
#include "intrins.h"
sbit ledOne = P3^7;
sbit dht = P3^3;//模块的data插在p3.3
sbit fengshan = P1^6;
char datas[5];
sfr AUXR = 0x8E;
#define databuffer P0 //定义8位数据线,Po端口组
sbit RS = P1^0;
sbit RW = P1^1;
sbit EN = P1^4;
char temp[8];
char huma[8];
void check_busy()
{
char tmp = 0x80;
databuffer = 0x80;
while(tmp & 0x80){//1000 0000
RS = 0;
RW = 1;
EN = 0;
_nop_();
EN = 1;
_nop_();
_nop_();
tmp = databuffer;
EN = 0;
_nop_();
}
}
void Write_Cmd_Func(char cmd)
{
check_busy();
RS = 0;
RW = 0;
EN = 0;
_nop_();
databuffer = cmd;
_nop_();
EN = 1;
_nop_();
_nop_();
EN = 0;
_nop_();
}
void Write_Data_Func(char dataShow)
{
check_busy();
RS = 1;
RW = 0;
EN = 0;
_nop_();
databuffer = dataShow;
_nop_();
EN = 1;
_nop_();
_nop_();
EN = 0;
_nop_();
}
void Delay15ms() //@11.0592MHz
{
unsigned char i, j;
i = 27;
j = 226;
do
{
while (--j);
} while (--i);
}
void Delay5ms() //@11.0592MHz
{
unsigned char i, j;
i = 9;
j = 244;
do
{
while (--j);
} while (--i);
}
void UartInit(void) //9600bps@11.0592MHz
{
AUXR = 0x01;
SCON = 0x40; //配置串口工作方式1,REN不使能接收
TMOD &= 0xF0;
TMOD |= 0x20;//定时器1工作方式位8位自动重装
TH1 = 0xFD;
TL1 = 0xFD;//9600波特率的初值
TR1 = 1;//启动定时器
}
void sendByte(char data_msg)
{
SBUF = data_msg;
while(!TI);
TI = 0;
}
void sendString(char* str)
{
while( *str != '\0'){
sendByte(*str);
str++;
}
}
void Delay30ms() //@11.0592MHz
{
unsigned char i, j;
i = 54;
j = 199;
do
{
while (--j);
} while (--i);
}
void Delay60us() //@11.0592MHz
{
unsigned char i;
i = 25;
while (--i);
}
void Delay1000ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 8;
j = 1;
k = 243;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void DHT11_Start()
{
dht = 1;
dht = 0;
//延时30ms
Delay30ms();
dht = 1;
//卡d点;while(dht1); 卡e点 while(!dht) 卡f点:while(dht)
while(dht);
while(!dht);
while(dht);
}
void Delay40us() //@11.0592MHz
{
unsigned char i;
_nop_();
i = 15;
while (--i);
}
void Read_Data_From_DHT()
{
int i;//轮
int j;//每一轮读多少次
char tmp;
char flag;
DHT11_Start();
for(i= 0;i < 5;i++){
//卡g点:while(!dht) 有效数据都是高电平,持续时间不一样,50us读,低电平0 高电平
for(j=0;j<8;j++){
while(!dht);//等待卡g点
Delay40us();
if(dht == 1){
flag = 1;
while(dht);
}else{
flag = 0;
}
tmp = tmp << 1;
tmp |= flag;
}
datas[i] = tmp;
}
}
void LCD1602_INIT()
{
//(1)延时 15ms
Delay15ms();
//(2)写指令 38H(不检测忙信号)
Write_Cmd_Func(0x38);
//(3)延时 5ms
Delay5ms();
//(4)以后每次写指令,读/写数据操作均需要检测忙信号
//(5)写指令 38H:显示模式设置
Write_Cmd_Func(0x38);
//(6)写指令 08H:显示关闭
Write_Cmd_Func(0x08);
//(7)写指令 01H:显示清屏
Write_Cmd_Func(0x01);
//(8)写指令 06H:显示光标移动设置
Write_Cmd_Func(0x06);
//(9)写指令 0CH:显示开及光标设置}
Write_Cmd_Func(0x0c);
}
void LCD1602_showLine(char row, char col, char *string)
{
switch(row){
case 1:
Write_Cmd_Func(0x80+col);
while(*string){
Write_Data_Func(*string);
string++;
}
break;
case 2:
Write_Cmd_Func(0x80+0x40+col);
while(*string){
Write_Data_Func(*string);
string++;
}
break;
}
}
void Build_Datas()
{
huma[0] = 'H';
huma[1] = datas[0]/10 + 0x30;
huma[2] = datas[0]%10 + 0x30;
huma[3] = '.';
huma[4] = datas[1]/10 + 0x30;
huma[5] = datas[1]%10 + 0x30;
huma[6] = '%';
huma[7] = '\0';
temp[0] = 'T';
temp[1] = datas[2]/10 + 0x30;
temp[2] = datas[2]%10 + 0x30;
temp[3] = '.';
temp[4] = datas[3]/10 + 0x30;
temp[5] = datas[3]%10 + 0x30;
temp[6] = 'C';
temp[7] = '\0';
}
void main()
{
Delay1000ms();
UartInit(); //串口初始化
LCD1602_INIT();//LCD1602初始化
Delay1000ms();
Delay1000ms();
ledOne = 0;
while(1){
Delay1000ms();
Read_Data_From_DHT();//读取温湿度数据
if(datas[2] > 24){//datas[2]温度的整数部分
fengshan = 0;//开风扇
}
Build_Datas();//对获取的温湿度数据转化
sendString(huma);
sendString("\r\n");
sendString(temp);
sendString("\r\n");
LCD1602_showLine(1,2,huma);//在LCD1602上显示
LCD1602_showLine(2,2,temp);
}
}
















 643
643











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











