






题目:Non-Uniform Blind Deblurring by Reblurring
题目:通过再模糊实现非均匀盲消模糊
作者:Yuval Bahat ,Weizmann研究所,计算机科学和应用数学系
发表地方:ICCV
发表时间:2017
主要内容介绍:
非均匀,盲去模糊,加模糊,非深度学习方法。但是是用在了去除运动模糊的。
就是他通过模糊patch,预测模糊场,然后根据预测的模糊场去模糊。
摘要:
提出了一种盲图像去模糊方法,处理非均匀模糊。我们的算法有两个主要的组成部分:(i)一个新的方法直接从模糊图像来恢复未知的模糊场,和(ii)一个方法,用给定恢复的非均匀模糊场,来去模糊。
我们的模糊场估计,是通过再次模糊这个模糊图像块,分析该图像块的光谱内容,而实现的。由于不受任何训练数据的限制,它可以处理大量不同的模糊尺寸,与基于训练的深度学习方法相比,可以产生更好的模糊场估计结果。
我们的非均匀去模糊算法,是基于内部特定图像的拼接递归算法。它试图恢复一个清晰的图像,一方面该清晰图能够产生在我们估计的模糊场下的模糊图像,另一方面最大限度地提高了恢复后的清晰图像内部和跨尺度图像块的重复性。
这两个组件的组合产生了盲去模糊算法,该算法在不需要任何训练数据的情况下,大大超出了目前最先进的基于cnn的盲消模糊算法的性能。
Introduction
我们日常生活中拍摄的图像经常被模糊所破坏。这种模糊可能是由摄像机运动、散焦、场景中刚性或非刚性物体的运动等原因造成的。在不了解模糊函数的情况下,仅从模糊图像中恢复清晰图像是近年来许多研究的重点,称为盲图像去模糊。一些方法假设图像是均匀模糊的(例如,[2,2,20,15,18]),而另一些方法假设一个变化的模糊域[7,16,21,23,3,9,10,19]
当图像中的模糊是均匀的,锐化图像和模糊图像之间的关系是一个简单的卷积:

其中,为Is锐化图像,Ib为模糊图像,k为空间均匀模糊核,n为噪声。当模糊核k已知的时候,恢复就是用k进行反褶积(这本身就是一个不适定的问题,因为k在频域中有很多0)。在盲的情况下,问题变得更加困难,因为锐化图像和模糊核k都是未知的[2,22,20,15,18],因为许多不同的Is和k对可以产生相同的输入模糊图像Ib。当模糊不再均匀时,问题变得更加不适定。这种情况不能再被建模为卷积。尽管如此,它仍然可以写成线性变换

其中,矩阵K表示一个非常大的模糊矩阵,其中每一行对应于一个在特定像素处建模模糊的内核。它是一个类似于卷积矩阵的矩阵,只是每一行包含一个不同的核(它不再是矩阵)。
非均匀盲消模糊是近年来受到广泛关注的问题。一些方法[7,16,21,23]假设模糊是由一般的3D相机抖动造成的;它们不能处理不连续模糊的动态场景。其他方法[3,1,8,13]检测运动物体的边界和模糊域,但假设每个运动物体内的模糊要么是均匀的[1,8,13],要么是参数化的[3]。[10]的方法处理一般的模糊,但假设输入是一个视频序列。**[9,19]的方法允许非均匀非参数的模糊场,每个像素有不同的模糊,但是假设每个像素的模糊是线性的。我们的方法属于这一类。**在[19],CNNs使用到这个任务中,并就我们所知,该方法提供了目前最先进的结果,在非均匀结合去模糊。尽管如此,作为一种基于学习的方法,CNNs受到他们所训练的数据类型的限制(例如,限制模糊尺寸)。相比之下,我们的方法(不是基于学习的)并不局限于特定的运动大小或图像类型。特别是,它可以处理非常大的模糊(例如,参见图1、2)。

本文提出了一种非均匀盲图像去模糊算法。我们的算法有两个主要的组成部分:(i)一个新的方法直接从模糊图像来恢复未知的模糊场,和(ii)一个方法由给定的恢复非均匀模糊场,去模糊。这两者的结合产生了一种盲消模糊算法,它的性能大大超过了目前最先进的基于cnn的盲消模糊算法,而且不需要任何训练。
我们的第一个主要组件——恢复未知的流场(flow-field)(section3)——是基于模糊的图像块的光谱分析,它很简单:我们假设非均匀blur-field是局部线性(1D模糊内核),但可能不同像素和空间不连续(即,具有标准的流场假设,但它是无向的)。如果我们有清晰图像,我们可以简单地用不同长度r和方向θ的各种一维模糊内核br (r,θ),模糊(卷积)整个图像。然后为每个像素(x, y)选择模糊核b (r,θ),标准是这个像素周围的块Is*b(r,θ)最接近输入模糊图Ib(MSE衡量)。其实就是列出来所有可能的卷积核,为每一个像素筛选出,最合适的那个卷积核。 然而,我们没有清晰的图像。==(第3节)我们证明,通过直接将模糊内核应用于模糊输入图像Ib,可以达到同样的效果。我们将这种方法称为重新模糊方法。==与[6]的全局光谱分析不同,我们的分析适用于局部图像斑块和非均匀模糊。
我们的第二个主要成分不均匀去模糊算法(section 4)是基于单个自然图像的==内部patch-recurrence(块重复)属性,该属性能成为一个特定图像的先验:小图像块(例如55、77)倾向于重复多次在相同尺寸,以及在不同的尺寸上。==这种递归性几乎适用于任何自然图像中的任何小块[5,24]。虽然这种重复在清晰图像中很强,但在模糊图像[15]中明显减弱(见图3),因此在未知锐化图像上形成了很强的先验。[15]在均匀模糊的情况下使用了这个先验(公式1的情况)。我们扩展了它对非均匀模糊的适用性。因此,我们的去模糊部分试图恢复一个清晰的图像,一方面该清晰图像能生成在我们估计的不均匀模糊场下的模糊图像Ib,另一方面最大限度地提高了恢复的清晰图像的内部重复性。
最后,将这两个部分结合成一个迭代的coarse-to-fine的盲去模糊算法(第5节),该算法在恢复清晰图像和细化计算出的模糊场之间交替进行。我们的实验结果(第6节)表明,我们的算法的性能超过了最先进的基于cnn的盲去模糊[19],以及其他方法,特别是在存在非常大的模糊的情况下(如图1、2)。这在质量上和数量上都有所体现(表1)。
2 问题定义和方法
我们的目标是“盲目地”从静止图像中去除不均匀的模糊。为了解决这个不适定问题,我们定义了以下目标函数:

其中,数据保真度项Edata执行正向模型(Eq. 2),意味着恢复的清晰图像I^s经过模糊处理后,与模糊的输入图像Ib相似:

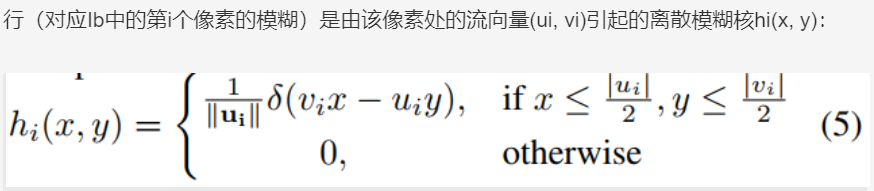
在[9,19]中,我们将模糊矩阵K = K(u)限定为模糊场u(x, y) = (u(x, y), v(x, y))T。也就是说,虽然模糊可能是非刚性的,并且在每个像素上都是不同的,但是我们假设每个像素都经历了局部线性模糊。我们后来证明(第6节)这不是一个限制性很强的假设。但是,请注意,与标准的光流不同,这种情况下的模糊流是无向的(因为(u, v)和(-u, -v)会导致相同的图像模糊)。K中的行(对应Ib中的第i个像素的模糊)是由该像素处的流向量(ui, vi)引起的离散模糊核hi(x, y):

式3中另外的项,Eimage(I^ s)和Eblur(K^ )分别是关于未知清晰图像I^ s和未知模糊矩阵K ^ 的先验项。潜在清晰图像I^ s上的先验项是基于梯度稀疏先验【14,12 】和内部patch重复先验【5,24】的组合。图像块重复在清晰的图像中很强烈,它在模糊的图像显著减少【15】(见图3)。因此形成了一个在清晰图像I^ s上的强大特定图像验(section4)。第二个正则化项,Eblur,执行平滑blur-field,潜在的模糊矩阵K^ 。??
Eq. 3中的目标不是凸的(由于先验的图像块重复性,以及矩阵K的性质),并且没有封闭形式的解。因此,我们使用交替迭代最小化过程来最小化它。我们直接从模糊图像Ib(参见section3)计算最初估计的非均匀流场uˆ。这就构成了我们最初的模糊矩阵Kˆ。然后,算法在以下两个步骤之间交替进行:(1)修正Kˆ和解决一个更清晰的图像Iˆ s,通过最大化图像先验(section4),(2)修正Iˆs和完善运动流估计uˆ,构成Kˆ(section3)。这种迭代交替优化是执行粗到细,并总结为section5。
3.通过再模糊,估计运动模糊(估计模糊场)
在本节中,我们将详细介绍如何估计模糊(输入图像Ib的)潜在模糊场。请注意,与标准的光流不同,这种情况下的模糊场是无向的(因为(u, v)和(-u, -v)会产生相同的模糊)。此外,执行常规的流场估计是在两个图像之间进行的,但是这里我们有一个单一的(模糊的)图像Ib。
我们的方法是基于图像块的光谱分析,它很简单:我们假设非均匀blur-field是局部线性(1D模糊内核),但可能不同像素和空间不连续(即,具有标准的流场假设,但它是无向的)。如果我们有清晰图像,我们可以简单地用不同长度r和方向θ的各种一维模糊内核br (r,θ),模糊(卷积)整个图像。然后为每个像素(x, y)选择模糊核b (r,θ),标准是这个像素周围的块Is*b(r,θ)最接近输入模糊图Ib(MSE衡量)。其实就是列出来所有可能的卷积核,为每一个像素筛选出,最合适的那个卷积核。 然而,我们没有清晰的图像。我们接下来证明,通过直接将模糊内核应用于模糊输入图像Ib,可以达到同样的效果。我们将这种方法称为重新模糊方法。
理想均匀模糊:为了简单起见,让我们先假设: (1) 整个(未知)大幅图像是由一个统一的一维模糊模糊内核 b ( r ∗ , θ ∗ ) b(r* ,θ*) b(r∗,θ∗),(2)这个核是一个理想的低通滤波器,也就是,一个旋转1d的sinc函数在空间域取向θ。这相当于在相同方向*的频域上与矩形函数相乘。我们将首先证明我们的方法适用于这个简单的情况,然后放松这两个假设。

(上面是证明这种简单情况,很好理解,就是先通过一个理想低通,再通过一个同样的理想低通,第二个理想低通前后并不改变的。注意是相同方向!)
注意到,相同方向,如果第一个矩形更小,第二个理想低通前后也是一样的。如果方向不一样,就不行啦。

换句话说,
b
(
r
∗
,
θ
∗
)
b (r*,θ*)
b(r∗,θ∗)是满足Eq7的最大的模糊核。尽管如此,如果我们现在向输入的模糊图像Ib添加噪声n,然后re-blur再次模糊Ib,b (r*,θ*)现在将成为所有模糊核中,提供最小MSE的那个核。根据Claim1,角度相同,半径小于r
∗
*
∗,则error减小到
∣
∣
n
∗
b
(
r
,
θ
∗
)
∣
∣
||n* b (r,θ*)||
∣∣n∗b(r,θ∗)∣∣。后一项,被θ*角度的所有核中的最大的模糊核,最小化了。(也就是r=r
∗
*
∗的那一项,是最大的模糊核。)
**泛化到非均匀模糊:**接下来,我们展示了同样的过程泛化到非均匀模糊,通过将它应用到更小的图像块(窗口)而不是整个图像。在Ib中,我们假设每个局部patch中存在一个局部1D均匀模糊。设P为以像素{x0, y0}为中心的大小为s×s的patch:
P
[
x
0
,
y
0
,
s
]
=
I
b
⋅
w
i
n
p
P [x0, y0, s] = I_b · win_p
P[x0,y0,s]=Ib⋅winp,
(上面就是,窗口取出来一个patch。)

(这个和Claim1很像,就是换成了局部模糊核,局部patch而已。局部是均匀的,所以就和Claim1差不多。)

(不考虑边缘的不同。)就有11式子了。
总结一下,在不均匀模糊的情况下,我们用各种1维模糊核,全局的重新模糊(卷积)有噪声的模糊图像Ib + n,并给每个像素(x, y)找到模糊核,这个模糊核应满足最小化周围窗口内的MSE (例如,尺寸为30×30的patch P)。
**现实的模糊:**到目前为止,我们讨论了理想的LPF模糊。然而,在现实中,模糊是由相机运动或场景对象在曝光期间的运动造成的。在空间域中,这相当于与矩形函数的卷积,而不是与理想的LPF的卷积。在频域中,这相当于与sinc函数的乘法,而不是与理想的LPF矩形函数的乘法。
理想模糊b (r,θ),方程式6和7不再成立,因为
B
2
(
r
,
θ
)
!
=
B
(
r
,
θ
)
B^2 (r,θ) != B (r,θ)
B2(r,θ)!=B(r,θ)(不像矩形函数那样,
s
i
n
c
2
(
r
,
θ
)
!
=
s
i
n
c
(
r
,
θ
)
sinc^2 (r,θ) != sinc (r,θ)
sinc2(r,θ)!=sinc(r,θ))。但是请注意,
s
i
n
c
2
(
r
,
θ
)
sinc^2 (r,θ)
sinc2(r,θ)保持相同的零在傅里叶域中sinc (r,θ),而乘以不同的sinc内核(与不同的r和θ)将在傅里叶域中产生新的零(见图4. d)。

对于理想模糊了,模糊的内核最小化简约b (r,θ)Ibk2永远是琐碎的δ函数(没有模糊),而不是正确的模糊的内核。但是,和以前一样,一旦我们在重新模糊之前给Ib添加了噪声,这种情况就会改变。内核最小化均方误差k (Ib + n) b (r,θ)Ibk(即k (Ib b (r,θ)Ib) + n b (r,θ)k)是(我)之间的最佳平衡消除尽可能多的增加噪声n,和(2)伤害小Ib的光谱内容。这种平衡是最好的达到粉红噪声噪声增加时,其功率谱密度(PSD)函数S (f) f1β类似于自然图像的PSD(我们使用β= 2)[17]。下面将对此进行解释,并通过图4进行说明。为了简单起见,我们对均匀模糊进行了说明,但是它使用与权利要求2相同的逻辑将其概括为非均匀模糊。
图4(a-c)显示了图像及其傅里叶大小。锋利的图像(图4.)是模糊了现实的(理想)一维模糊内核b (r,θ)(空间矩形的长度r = 10和角θ= 30,右上角的4. b所示)。这将生成模糊图像Ib(图4.b)。正如预期的那样,这种模糊乘法sinc函数的傅里叶域中θ= 30的方向。在模糊图像中加入粉红噪声n,得到图像Ib + n(图4.c),其光谱幅值与清晰的自然图像相似(与光谱4.a相似)。
我们现在Re-blur Ib + n与各种一维模糊内核b (r,θ)的不同长度和方向。产生的重新模糊的傅里叶光谱如图4所示。以及右上角的模糊内核。请注意,使用正确的内核((4.d)中的中心图像)重新模糊会产生与模糊图像Ib (4.b)最相似的结果,在相同的频率上为零。相比之下,其他内核不同θ和r收益率在不同频率0。虽然在傅里叶域中比较容易说明它们之间的异同,但是根据Parseval s定理,在(4.d)中,模糊图像(4.b)和重新模糊的噪声图像(4.d)之间的MSE在空间和频域上是相等的。实际上,我们看到正确的blur内核产生最低的MSE(在空间域中计算并为每个内核显示黄色)。
上述的重新模糊方法导致了一个密集的模糊场u(一个无方向的流场)。这构成了公式3的模糊矩阵K的初始估计,K用于估计初始锐化图像I s(参见第4节)。
当恢复到更清晰的图像时,Is接近底层的清晰图像。应用Re-blurring方法我年代(而不是Ib)逐渐收敛向我们的理想场景本节前面提到的:也就是说,当和Ib,我们可以寻求在每个局部窗口,满足本地的模糊的内核是b (r,θ)= Ib。因此,我们的流量估计是逐步完善的。
然而,单独使用再模糊方法来估计流量并不能获得良好的流量估计,因为它在小图像块中存在孔径问题(与常规的流量估计一样)。例如,如果一个局部patch只包含一个模糊的1D边缘,仅对这个patch进行分析,只能估计出局部blur在垂直于该边缘方向上的分量,而不能估计出平行于边缘方向上的分量。这导致不明确的局部模糊恢复。扩大窗口尺寸可以解决孔径问题,但可能不再满足局部均匀运动假设,特别是在运动不连续处。在我们当前的实现中,我们通常使用大小为30×30的补丁。尽管如此,这经常导致嘈杂的模糊字段。
为了缓解这个问题,我们在模糊估计过程中加入了一个先验项,它以平滑度约束的形式施加在估计的模糊区域上

其中wi(第i个像素权重)惩罚大流量(模糊)不连续,这种不连续是不符合锐利的图像边缘的。在我们目前的实现中,wi是I梯度的一个递减的Sigmoid函数(I梯度,最初使用模糊图像Ib进行估计,后来使用逐渐恢复的sharp image I s)。
回顾一下,我们的运动流估计可以归结为以下几点:鉴于目前估计的清晰图象ˆ年代,
等式3简化为

在每次迭代中,我们首先使用重新模糊的方法最小化Edata,得到K (u),然后通过优化Eq. 13(使用Matlab s lsqnonlin函数)进一步细化它以满足平滑约束,使用估计的K作为初始猜测。
4.给了K^ ,非均匀去模糊
接下来,我们将解释如何在给定模糊字段K的情况下对被非均匀模糊损坏的图像进行去模糊处理。在这种情况下,优化式3简化为

图像先验Eimage是内部patch复发先验[15]和梯度稀疏先验的组合[14,12]。前者是特定于图像的先验,而后者有助于减少振铃现象。
在清晰的自然图像中,patch的重复性很强[5,24]。然而,它在模糊图像[15]中显著减弱(见图3),因此它形成了一个非常强的图像特异性去模糊先验。Michaeli和Irani[15]的研究表明,在均匀模糊的情况下,patch的递归性只会在尺度上退化,因此,他们最大化了patch在尺度上的递归性,以重建出清晰的图像。在这项工作中,我们处理了不均匀的模糊,在这种情况下,patch的递归性在尺度内和尺度外都下降了(如图3所示)。我们使用与理想递归的偏差来重建清晰的图像。
当一个图像是缩减尺寸α倍就α-times尖锐。例如,一个边缘涂抹在10像素的原始图像,将涂抹在只有5像素(α= 2)。因为小块在清晰的自然图像不同scale重复,这意味着未知的清晰图象的小块,分布在模糊图像的course scales 表面。Michaeli和Irani[15]在均匀模糊的情况下使用了这一观察结果。他们从a倍缩小的I^s版本提取了a倍更清晰的很多小块,逐步构建清晰图象I ^ s。其迭代过程最小化两种patch之间的差异度,这两种patch是,I ^ s上的patch,和缩小a倍的I ^ s上的最近邻patch(NNs)。因为在缩减的图像中,patches只有α倍尖锐,他们作为一个进化的图像特定先验,逐渐重建清晰图象,这样,比之前从外部清晰patches学到的固定先验更好。(25、20)。接下来,我们将展示如何将这一思想扩展到非均匀模糊的情况。
**最大化patch-recurrence属性,在同尺度和跨尺度情况下(非均匀模糊情况下)😗*非均匀模糊的情况和均匀不同,因为即使patch在缩小后比原来的patch更shaper,每个补丁不一定会找到其最近邻(NN)更清晰的版本。例如,考虑两个相同的清晰图像Is的patch,他们有不同的模糊,一个模糊是长度为r(用P1),另一个模糊是长度为α·r(用P2)。在α-times缩小的图像里,模糊快P1将能够在缩小后的P2里面找到一个一样的模糊patch。这将是一个更好的NN比它自己的更尖锐的降级版本。这使得事情变得复杂,使得[15]的构造算法不适用于非均匀模糊的情况。另一方面,**在不均匀模糊的情况下,一个补丁可能会在相同的范围内找到一个更清晰的版本。例如,模糊补丁P1是α-times是模糊补丁P2在同一个图像比例尺的更清晰版本。**这意味着在不均匀的情况下,不同于[15],我们不想在两个补丁之间的相似性最大化,两个补丁是缩小前和缩小后的近邻。
相反,我们希望最大化相似性,相似性是在I ^ s的补丁和补丁DB(I ^ s,a)的内部数据库之间的,补丁DB(I ^ s,a)是从相同的规模和粗尺度下提取的,保证α倍更清晰。** 因为当前的估计K是给定的,对于每个补丁,我们知道在图像的范围内和范围内寻找可能更清晰的NNs。** 因此,之前的重复先验,ρ(I ^ s,DB(I ^ s,α)),度量前面两项之间的不同程度。

方程14的直接优化是棘手的,因为ρ不是凸的。如[25,15],采用半二次分裂方法[4],迭代求解。在每个迭代中,当前估计的I^s是由在DB(I ^ s,α)中的补丁建立,来产生一个中间更清晰的图像z。然后使约束的data项执行恢复图像应该接近z。这给了一个新的估计I ^ s,用来构造一个更新数据库DB(I ^ s,α)。这个过程在[15]中有详细描述。在后者内部步骤(执行data项),我们加入稀疏梯度(14、12)先验,最小化 。这有助于减少振铃效应,特别是在K中过高估计错误的情况下。
。这有助于减少振铃效应,特别是在K中过高估计错误的情况下。
5.盲去模糊算法
式3不是凸的(由于先验的补丁重复和矩阵K的性质),因此没有闭合形式的解。我们使用交替迭代最小化过程来最小化它。我们直接从模糊图像Ib计算最初的估计非均匀模糊场KaTeX parse error: Expected group after '^' at position 2: u^̲,使用Re-blurring方法(section3)。这是用于生成初始模糊矩阵
K
(
u
)
K^(u)
K(u)(见Eq5)。
该算法然后继续轮流估计清晰图像Is和改进模糊域估计u^,如算法1所示。

在对模糊场进行估计时,我们使用不同大小的模糊核对输入图像进行重新模糊。我们使用的最大模糊核大小是我们算法的一个参数,我们在当前的模拟中设置它为75像素。设置这个最大半径会产生可能的模糊(半)圆,每半像素采样一次。然后,按照第3节中的描述,我们计算并比较使用所有这些模糊内核重新模糊的图像的MSEs。
为了处理大的运动模糊,算法从粗到精执行,从Ib的缩小版本开始(比输入小10倍)。我们通常使用大小为30×30的补丁来估计模糊域。我们通常在每个尺寸上执行7次迭代,然后将经过锐化的图像扩大到三分之四倍,到下一个更精细的级别,在那里我们使用它来初始化过程。
6实验
我们评估了我们的盲消模糊算法在综合模糊图像和真实模糊图像上的效果。我们使用了[19]创建的数据库,该数据库由15幅图像组成,这些图像通过各种非均匀运动模糊场和地面真实(GT)数据进行综合模糊。我们进一步添加了30多个综合模糊图像(均匀模糊和非均匀模糊);一半的图像进行了中度模糊(最多16像素的运动),而其他图像被较大的运动模糊(最多38像素)所模糊,参见www.wisdom.weizmann.ac.il/vision /DeblurringByReblurring。我们还在[19]使用的真实图像上运行了我们的算法,以及在具有严重(未知)模糊的其他真实图像上运行了我们的算法。
对真实图像和合成图像的结果与最先进的基于cnn的方法[19]进行了比较。我们进一步和23在综合数据集上比较结果,由于合成的非均匀模糊符合他们的三维摄像机运动模型假设(真实图像不符合)。
图1、2和5显示了视觉上的比较;表1显示了定量比较。我们使用PSNR和SSIM方法,通过比较恢复的锐化图像和GT锐化图像来量化去模糊质量。我们还使用图像像素测量的平均端点误差(EPE),通过比较恢复的模糊场和GT模糊场来比较模糊场估计的性能。定义为EPE = p(u ugt)2 + (v vgt)2,其中(ugt, vgt)表示地面真值流。
我们的方法对中度模糊图像(+0.73dB, +2dB)的处理效果优于[19,23],对重度模糊图像(+1.2dB, +1.54dB)的处理效果明显优于[19,23]。与[19]相比,我们在大尺寸模糊上的显著优势在图1和图2中也很明显。我们处理大范围非均匀模糊的能力源于我们的方法不依赖于任何训练数据,因为不受限于一组有限的“熟悉的”(训练过的)模糊类型。
但是注意,在中度模糊的图像上,我们的流量估计结果比[19]略差。然而,对于这些相同的流量估计,我们恢复的清晰图像与[19]相比提高了PSNR和SSIM。我们认为这是由于我们的流量估计在均匀的图像区域是非常不准确的(由于孔径问题)。虽然这会影响流误差,但不会影响去模糊效果。
为了证明局部线性模糊假设不是太严格,我们在[11]数据集上运行了我们的算法,该数据集包含由一般相机运动获得的高度非线性模糊。我们的方法产生的平均PSNR为26.33dB,与该数据集上的8种非线性去模糊方法相比(基于[23]中报告的定量结果)。尽管所有这些方法都是非线性的,而我们的方法是局部线性的,而且一些(更好的方法)天生局限于纯3D摄像机运动模型,而我们的方法也可以处理非刚性动态场景。
7总结
提出了一种非均匀模糊的单图像盲消模糊方法。我们的方法在估计非均匀模糊域(使用重新模糊方法)和恢复清晰图像(使用图像特定的patch递归先验)之间迭代。我们的方法不依赖于任何训练数据,因此可以处理大量的图像和运动。事实上,我们证明了它比当前基于训练的方法,如CNNs,表现得更好,尤其是在大动作上。
可以参考
1.介绍了移不变和空间变化两种模糊模型。可以作为基本图像退化基本模型。
2.研究现状,列举了一些空间变和不变的去模糊研究,但是不一定是defocus的。
3.评价是PSNR和SSIM















 2122
2122











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









