







引言
虽然目标跟踪已经研究了几十年,但是光照背景、遮挡等问题,并不存在能够成功处理所有场景问题的跟踪方法,因此评估最先进跟踪器的性能至关重要,以展示他们的优缺点,并帮助确定该领域的未来研究方向,设计更具有鲁棒性的算法。
相关工作
从几个主要的模块上来回顾近年来的目标跟踪算法:目标表示方式、搜索机制和模型更新。另外,介绍一些基于联合几个跟踪器或者挖掘上下文信息的跟踪方法。
评估算法和数据集
1)评价的算法:

以及mean shift(MS-V), template matching (TM-V), ratio shift(RS-V) andpeak difference (PD-V) 方法。
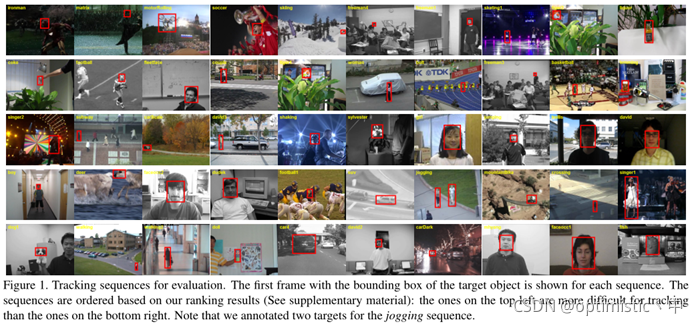
2)评价的数据集
3)评价的视频属性

 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









