







基本信息
| 期刊 | CVPR |
|---|---|
| 年份 | 2023 |
| 论文地址 | https://browse.arxiv.org/pdf/2207.05921.pdf |
| 代码地址 | https://github.com/moothes/A2S-v2 |
标题
基于纹理引导的显著性提取的无监督显著性目标检测
目前存在的问题
- 大多数基于深度学习(Deep learning, DL-based)的方法都是基于传统SOD方法提取的显著性线索。这些手工制作的特征相关线索被用作伪标签,在一定的约束条件下训练深度网络,如二进制交叉熵(BCE)丢失。然而,传统方法的显著性线索往往会偏离目标对象,特别是在复杂场景中
- 传统的约束条件,如BCE损耗,在完全监督的SOD方法上工作良好,但在拟合无监督方法的噪声标签时就不是最优的
- 深度网络可以学习从噪声标签中定位显著区域[80],但仍然难以找到目标物体的精确边界
改进
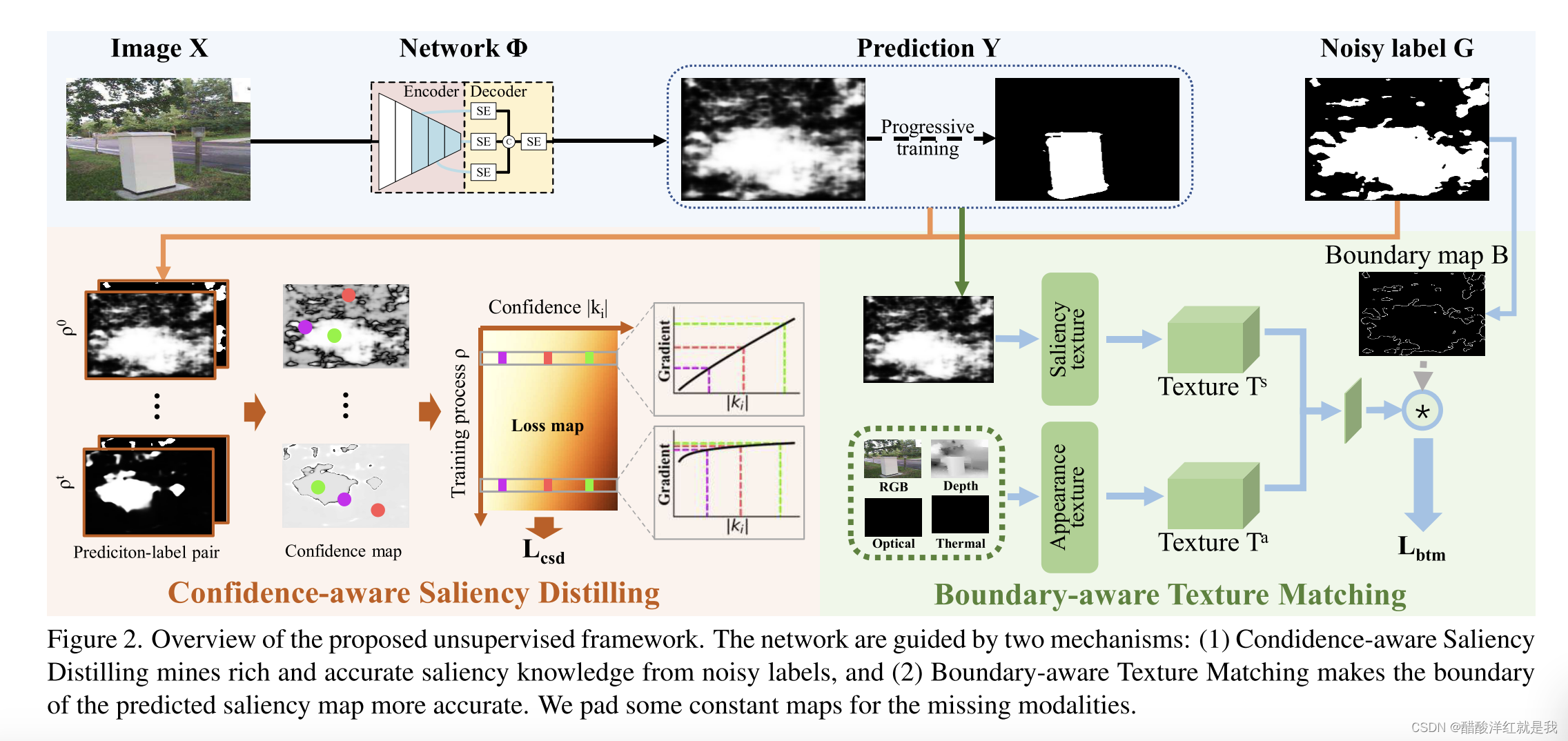
- 为了从噪声标签中挖掘出丰富而准确的显著性知识,我们提出了一种基于信心感知的显著性提取方法(CSD),突破了现有方法无法利用硬样本的局限性。
- 我们提出了一种边界感知纹理匹配(boundary -aware Texture Matching, BTM),通过匹配不同空间的纹理来细化预测显著性映射的边界。
网络结构

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











