






Points2Surf Learning Implicit Surfaces from Point Clouds-ECCV2020
背景
截断符号距离场:

一、Introduction
一个好的点云表面算法:应该可以处理有噪声的数据,可以适应点云密度的变化,可以生产不同的表面拓扑,可以在大规模点云扫描模型上生效。
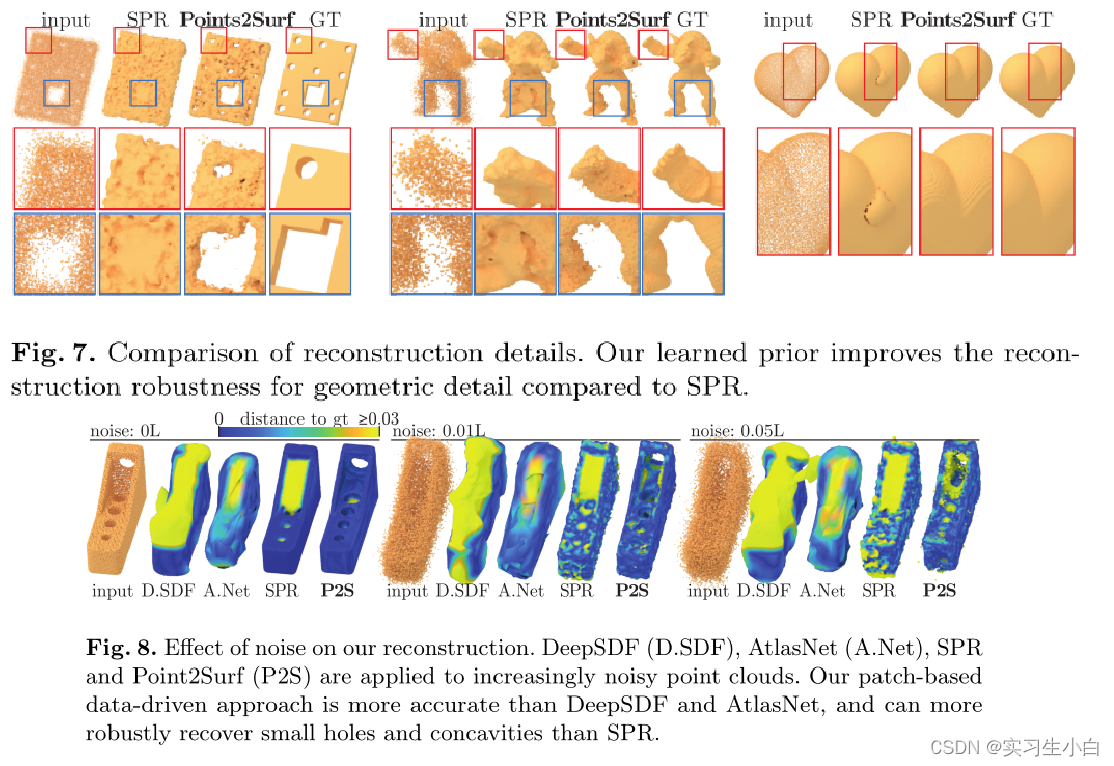
一个直观的发现是屏蔽泊松表面重建在处理有噪声和非均匀的表面时,会错误的关闭空洞。

二、相关工作
1.非数据驱动的表面重建
从有噪声的点云重建具有任意拓扑的曲面的最广泛使用的方法将隐式函数拟合到点云,并生成曲面作为函数的水平集。
隐式函数的不同表示:傅立叶系数/径向基函数/多尺度
黄金标准:泊松重建
2.数据驱动的表面重建
训练决策树来预测SDF的绝对距离部分
通常非常粗糙且不防水或歧管
三、方法
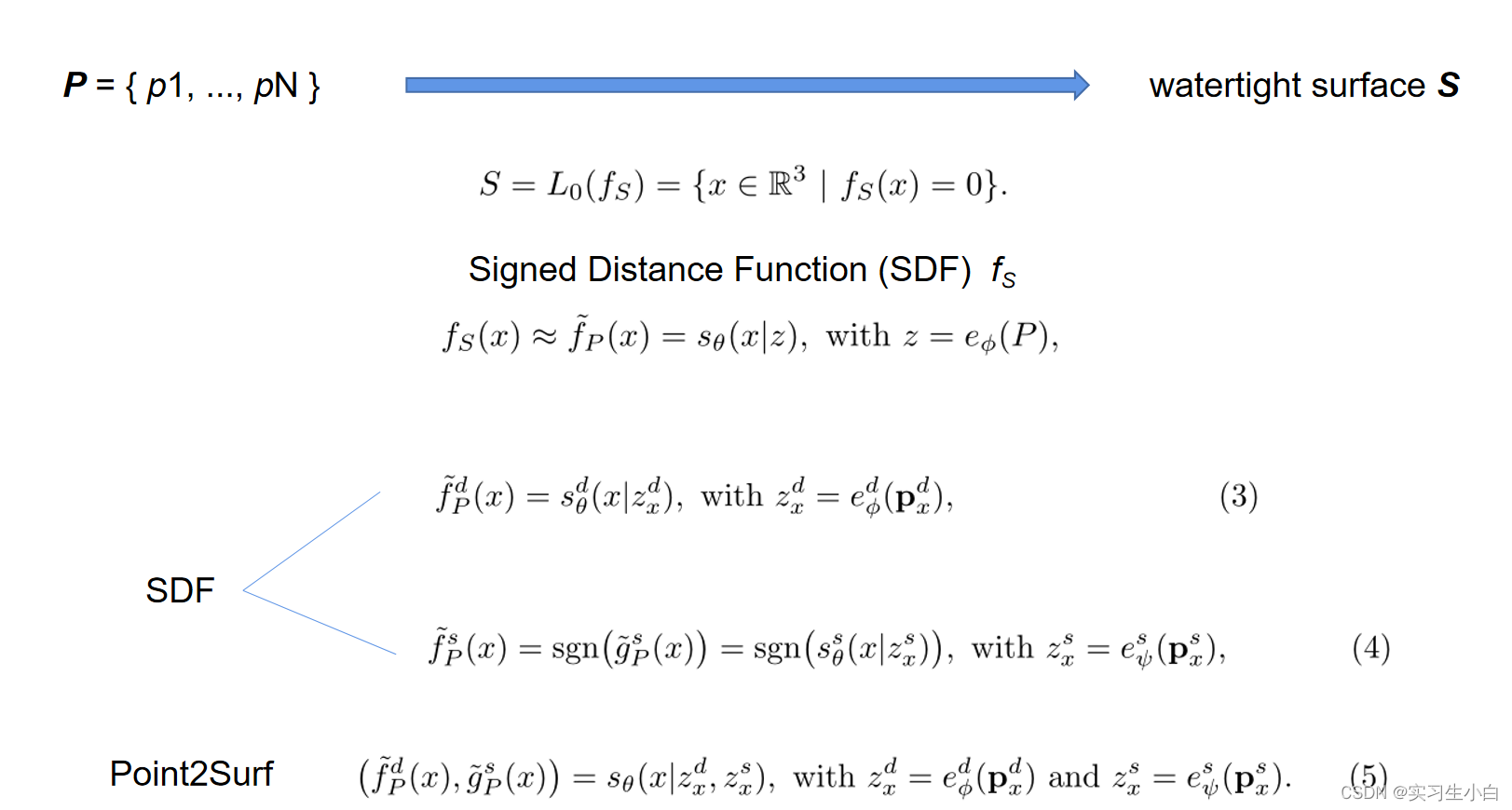
将SDF分解成计算符号函数与距离函数,训练两个网络同框架,不同参数。
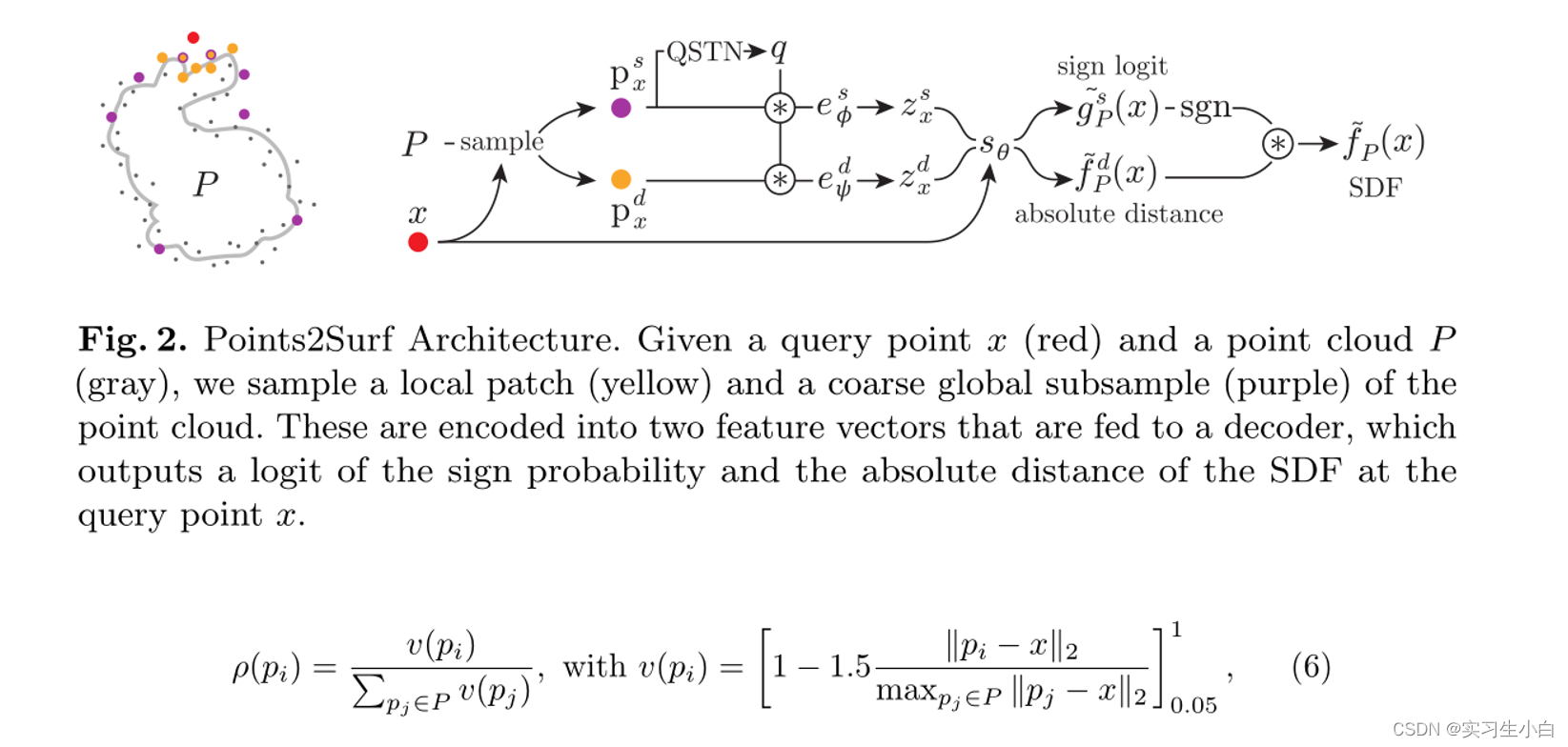 红色为查询点,紫色为全局子样本点,黄色为近邻样本点。
红色为查询点,紫色为全局子样本点,黄色为近邻样本点。
训练距离函数需要使用近邻搜索。–》local
训练符号函数需要使用全局子样本。–》nolocal
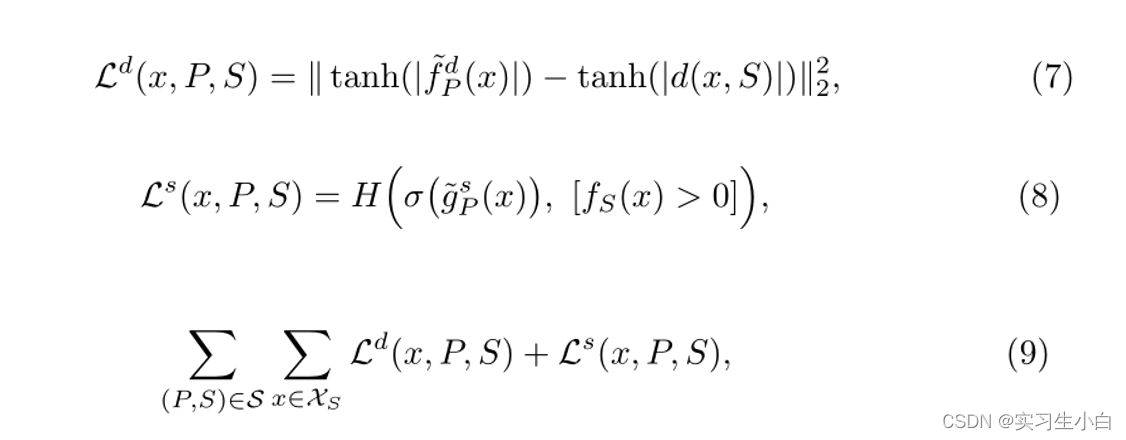
损失函数cd+logits
四、结果
数据集
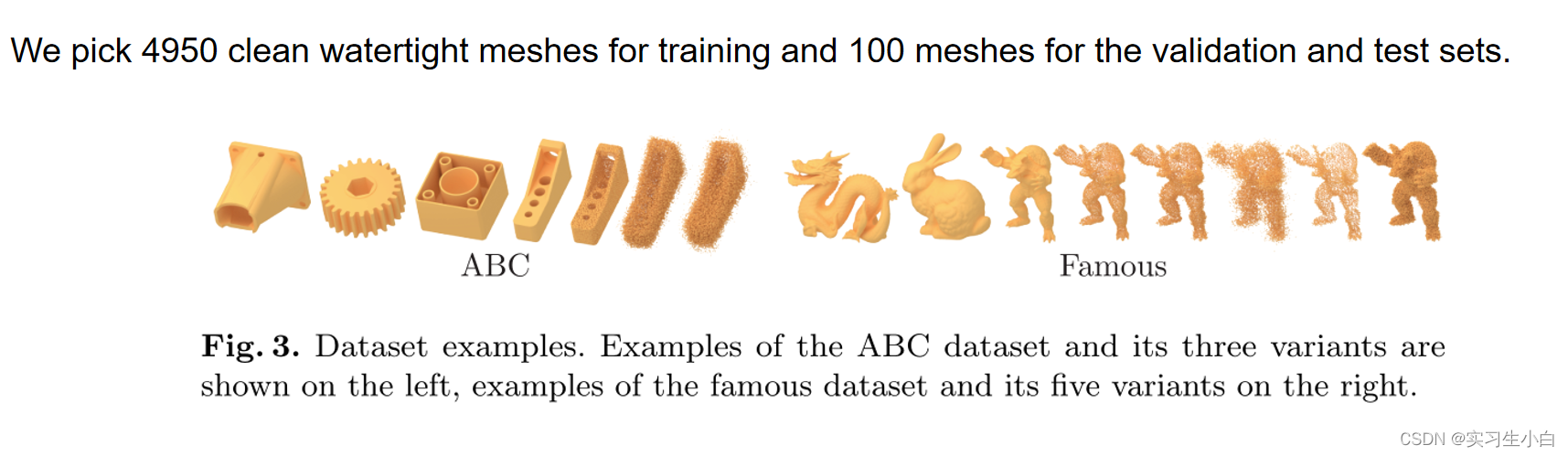 ABC数据集+典型数据集
ABC数据集+典型数据集
将不同噪声创造出不同版本的数据集,no-noise var-noise max-noise med-noise
将不同密度创造出不同版本的数据集,sparse,dense
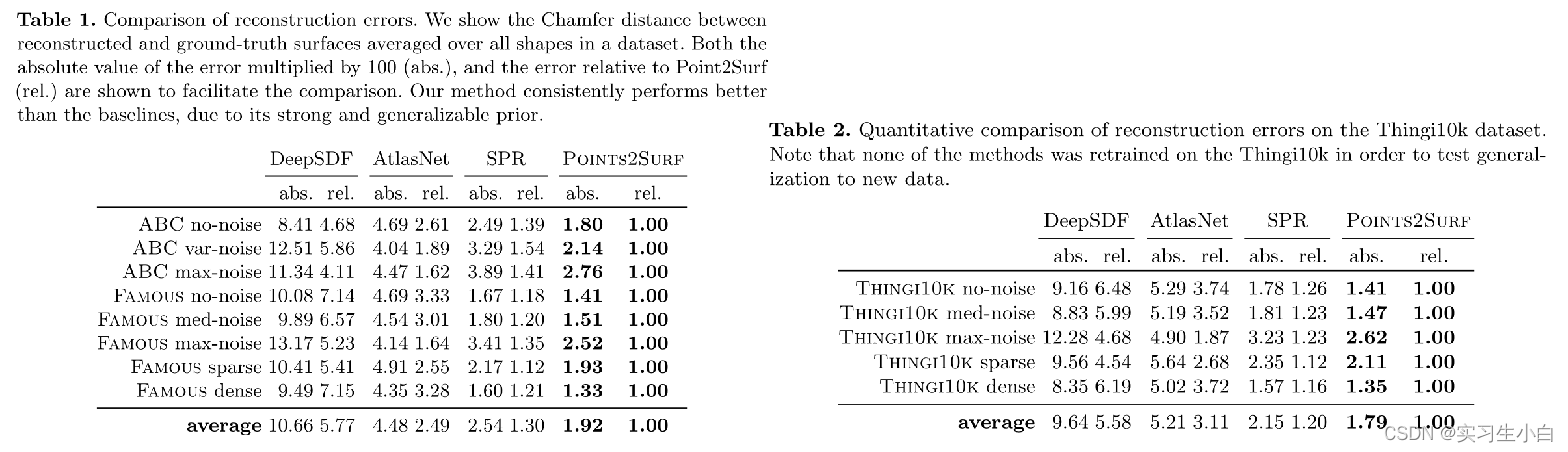
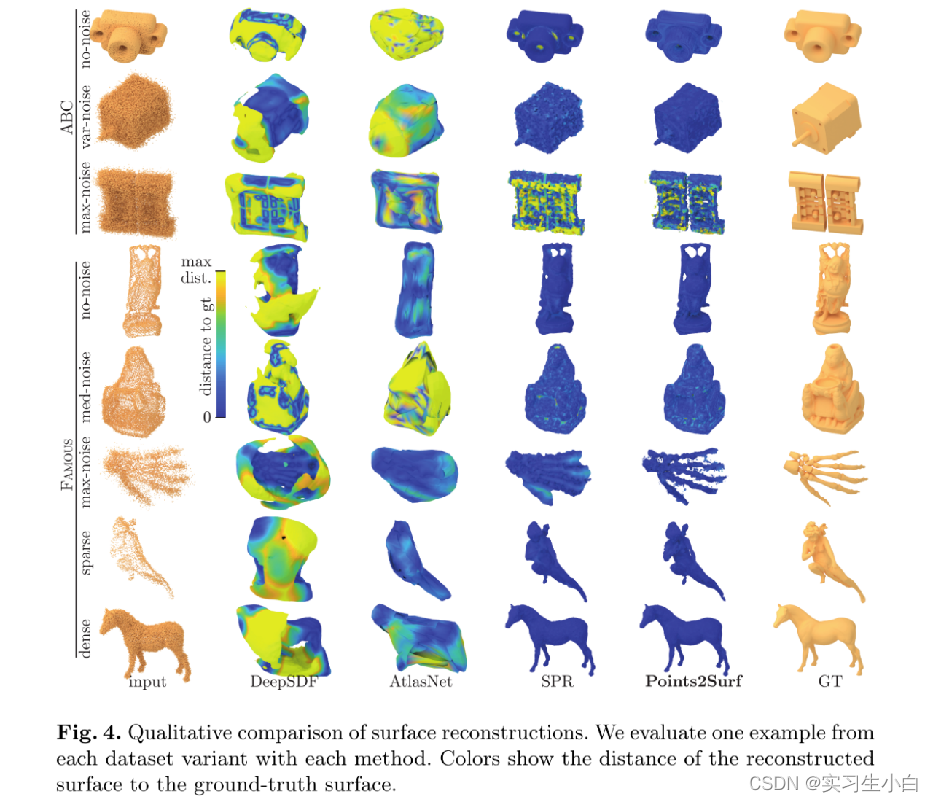
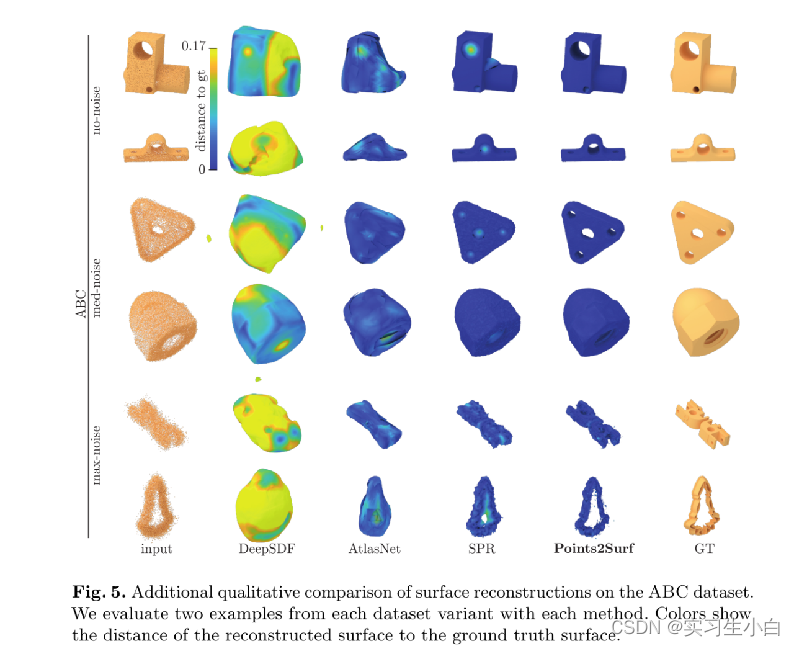
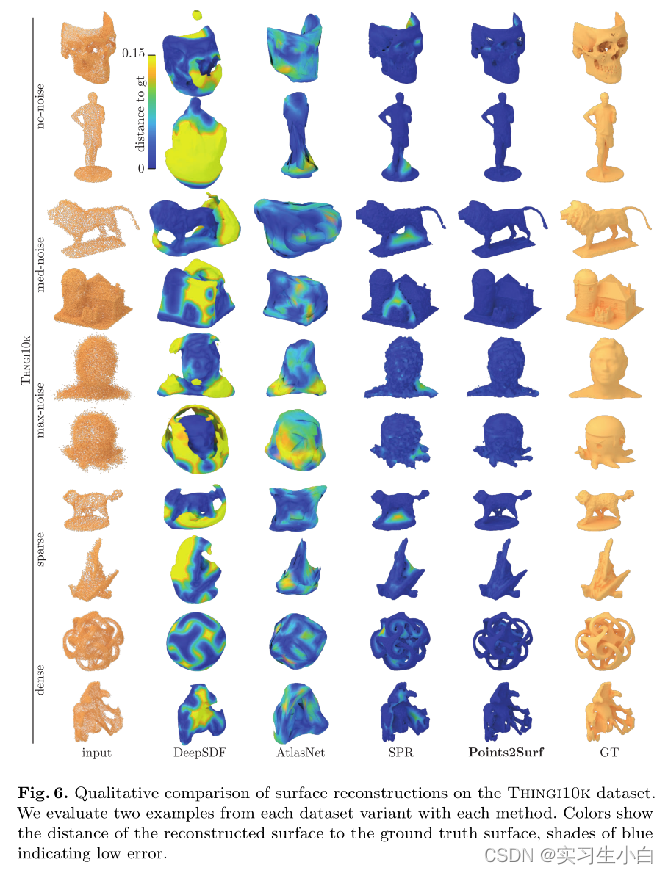
对比于基线

总结
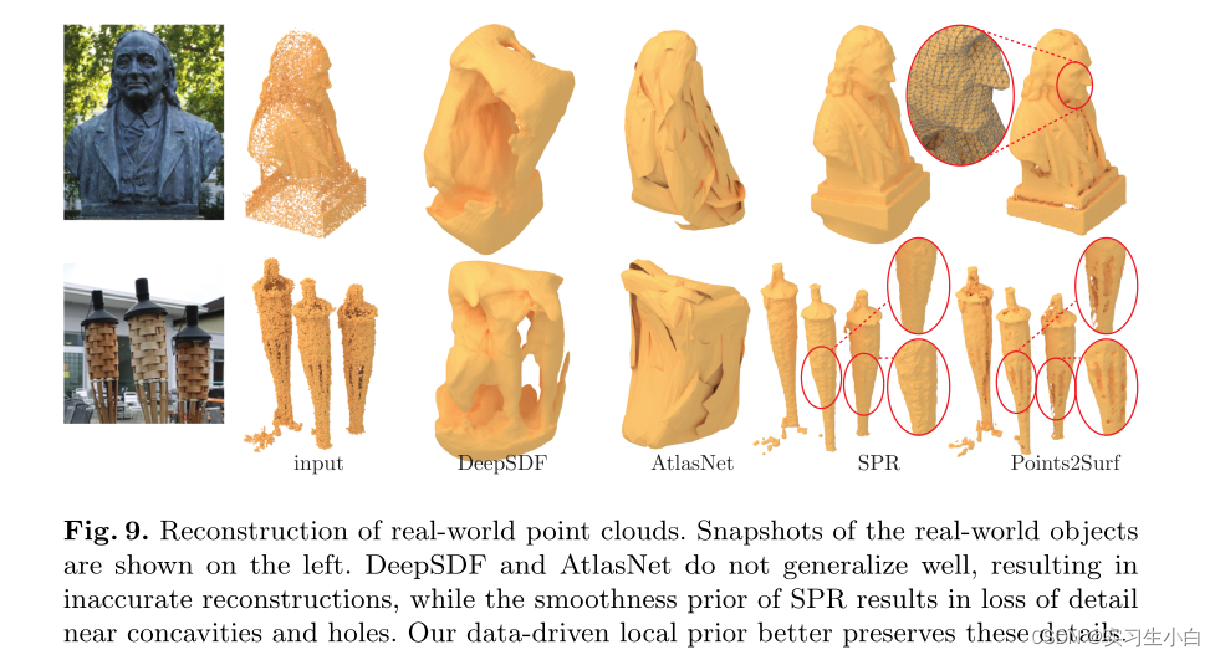
我们已经提出了Points2Surf作为一种从原始点云重建表面的方法。我们的方法可靠地捕捉了几何和拓扑细节,并比目前的方法更稳健地推广到看不见的形状。
















 278
278











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









