







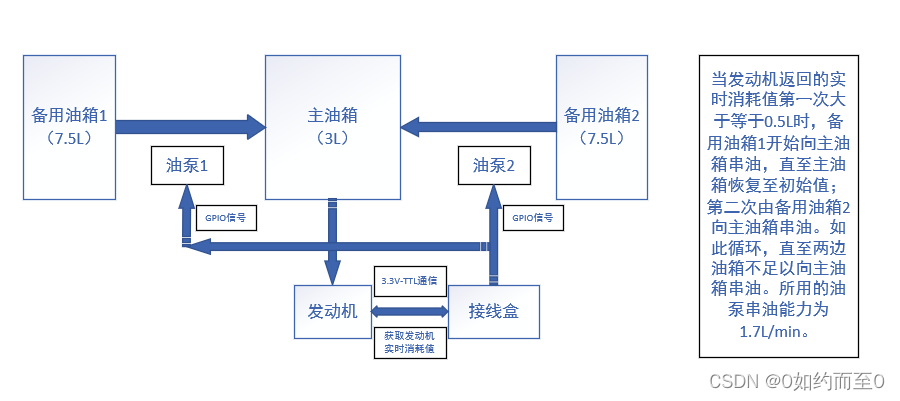
最近在项目中,需要再写一个两边油箱向中间油箱串油的程序。相比于上两次的串油系统,整个供油系统无外部传感器,即完全根据发动机返回的实时油量消耗,来串油和停止串油。串油示意如下图:主油箱第一次消耗0.5L油时,由备用油箱1向主油箱串油,直至主油箱恢复到初始油量;当主油箱第二次消耗0.5L油时,由备用油箱2向主油箱串油,直至主油箱恢复到初始油量;如此循环。
软件实现过程中,相较于前两次的串油逻辑,这次只用到了一个定时器中断,完成串油和停止串油逻辑判断、计算开始串油中间变量,及停止泵油中间变量。相关代码如下,
int my_task6_RFI(void)
{
static int err_num = 0;
// u8 RAC_Finish = 0;
u8 RFI_cmd_lenth = 45;
/*发送RFI命令************************************************/
memset(DMA_Rx_Buffer,0,256);
Send_RFI_Cmd();
cnt =0;
while(find_RFI() == 0)
{
cnt++;
delay_ms(1);
if(cnt == 200) break;
}
if(RFI.find_0d == 1)
{
err_num = 0;
RFI_Data_Catch(DMA_Rx_Buffer,RFI_cmd_lenth);
DATA_TO_UAV.Fuel_flow = RFI_Info_struct.first_data;
DATA_TO_UAV.Remaining_oil = RFI_Info_struct.secon_data;
DATA_TO_UAV.setted_RPM = RFI_Info_struct.third_data;
DATA_TO_UAV.BAT_voltage = RFI_Info_struct.forth_data;
DATA_TO_UAV.LAST_Run_time = RFI_Info_struct.fivet_data;
DATA_TO_UAV.Fuel_consumption = RFI_Info_struct.sixth_data;
//油量消耗传递mL转换成L
true_flag=1;
oil_use=((float)DATA_TO_UAV.Fuel_consumption)/1000.0;
return 1;
}
else
{
++err_num;
if(err_num > 15)
{
err_num = 0;
DATA_TO_UAV.status = 0xFF;
}
return 0;
}
}
//通用定时器3中断初始化
//arr:自动重装值。
//psc:时钟预分频数
//定时器溢出时间计算方法:Tout=((arr+1)*(psc+1))/Ft us.
//Ft=定时器工作频率,单位:Mhz
//这里使用的是定时器3!
void TIM5_Int_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM5,ENABLE); ///使能TIM3时钟
TIM_TimeBaseInitStructure.TIM_Period = arr; //自动重装载值
TIM_TimeBaseInitStructure.TIM_Prescaler=psc; //定时器分频
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM5,&TIM_TimeBaseInitStructure);//初始化TIM3
TIM_ITConfig(TIM5,TIM_IT_Update,ENABLE); //允许定时器3更新中断
TIM_Cmd(TIM5,ENABLE); //使能定时器3
NVIC_InitStructure.NVIC_IRQChannel=TIM5_IRQn; //定时器3中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0x00; //抢占优先级1
NVIC_InitStructure.NVIC_IRQChannelSubPriority=0x03; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
u8 ry_flag;
float oil_use;
extern u8 true_flag;
float add_oil_begin_initial;
float add_oil_begin;
u8 add_oil_begin_flag;
float add_oil_stop_initial;
float add_oil_stop;
u8 add_oil_stop_flag;
u16 add_oil_stop_count;
u8 switch_flag_pb7;
u8 switch_flag_pb8;
u16 oil_time;
//定时器3中断服务函数
void TIM5_IRQHandler(void)
{
if(TIM_GetITStatus(TIM5,TIM_IT_Update)==SET) //溢出中断
{
//发动机数据解析成功one time
//以防出现发动机反馈的数据出现初始消耗的问题
if(true_flag==1)
{
//用于判断开始串油量
if(ry_flag==0)
{
if(add_oil_begin_flag==0)
{
add_oil_begin_initial=oil_use;
add_oil_begin_flag=1;
}
else
{
add_oil_begin=oil_use-add_oil_begin_initial;
}
}
else//用于判断停止串油量
{
if(((ry_flag==1)&&(switch_flag_pb7==1))||((ry_flag==1)&&(switch_flag_pb8==1)))
{
add_oil_stop_count++;
if(add_oil_stop_flag==0)
{
add_oil_stop_initial=oil_use;
add_oil_stop_flag=1;
}
else
{
add_oil_stop=oil_use-add_oil_stop_initial;
}
}
}
}
switch_flag_pb7=GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_7);
switch_flag_pb8=GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_8);
if(oil_time<20)
{
if(((ry_flag==0)&&(add_oil_begin>=0.5)&&(switch_flag_pb7==0))||((ry_flag==0)&&(add_oil_begin>=0.5)&&(switch_flag_pb8==0)))
{
add_oil_begin=0;
add_oil_begin_flag=0;
oil_time++;
ry_flag=1;
if(oil_time%2!=0)
{
GPIO_SetBits(GPIOB,GPIO_Pin_7);
}
else
{
GPIO_SetBits(GPIOB,GPIO_Pin_8);
}
}
if(((ry_flag==1)&&(add_oil_stop_count*(1.7/60.0/20.0)>=(add_oil_stop+0.5))&&(switch_flag_pb7==1))||((ry_flag==1)&&(add_oil_stop_count*(1.7/60.0/20.0)>=(add_oil_stop+0.5))&&(switch_flag_pb8==1)))
{
add_oil_stop_count=0;
ry_flag=0;
add_oil_stop=0;
add_oil_stop_flag=0;
if(oil_time%2!=0)
{
GPIO_ResetBits(GPIOB,GPIO_Pin_7);
}
else
{
GPIO_ResetBits(GPIOB,GPIO_Pin_8);
}
}
}
if(oil_time>20)
{
add_oil_stop_count=0;
ry_flag=0;
add_oil_stop=0;
add_oil_begin=0;
add_oil_begin_flag=0;
add_oil_stop_flag=0;
GPIO_ResetBits(GPIOB,GPIO_Pin_7);
GPIO_ResetBits(GPIOB,GPIO_Pin_8);
}
}
TIM_ClearITPendingBit(TIM5,TIM_IT_Update); //清除中断标志位
}















 1811
1811











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









