







欧式聚类(C++编写实现<不需要任何库>)
简介:
本项目应用背景:点云数在1000个以内,但需要使用欧式聚类,故过程中未使用建树过程,针对实际项目接口编写,此项目数据结构 (struct OBJPOINT) 为项目中数据结构,不能改变,故采用pair反应点状态。输入接口有两个 (ImportPointCloud 、SetDate), 一个测试使用,一个实际项目接口使用。
1、设置三个参数
**tolerance **是设置 kdtree 的近邻搜索的搜索半径,从实验结果来看,tolerance 越大,检测到的范围也就越大; 同时如果搜索半径取一个非常小的值,那么一个实际的对象就会被分割为多个聚类;如果将值设置得太高,那么多个对象就会被分割为一个聚类;
**setMinClusterSize()**来限制一个聚类最少需要的点数目;
**setMaXClusterSize()**来限制最多需要的点数目;这两个不要解释;
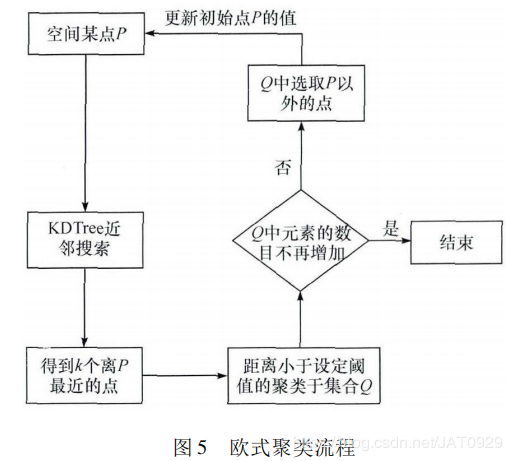
2、聚类过程
1、 找到空间中某点p10,有kdTree找到离他最近的n个点,判断这n个点到p的距离。将距离小于阈值r的点p12,p13,p14…放在类Q里
2、 在 Q(p10) 里找到一点p12,重复1
3 、在 Q(p10,p12) 找到一点,重复1,找到p22,p23,p24…全部放进Q里
4 、当 Q 再也不能有新点加入了,则完成搜索了;
3、PCL源码解析
pcl::extractEuclideanClusters (const PointCloud<PointT> &cloud,
const typename search::Search<PointT>::Ptr &tree,
float tolerance, std::vector<PointIndices> &clusters,
unsigned int min_pts_per_cluster,
unsigned int max_pts_per_cluster)
{
if (tree->getInputCloud ()->points.size () != cloud.points.size ()) // 点数量检查
{
PCL_ERROR ("[pcl::extractEuclideanClusters] Tree built for a different point cloud dataset (%lu) than the input cloud (%lu)!\n", tree->getInputCloud ()->points.size (), cloud.points.size ());
return;
}
// Check if the tree is sorted -- if it is we don't need to check the first element
int nn_start_idx = tree->getSortedResults () ? 1 : 0;
// Create a bool vector of processed point indices, and initialize it to false
std::vector<bool> processed (cloud.points.size (), false);
std::vector<int> nn_indices;
std::vector<float> nn_distances; // 定义需要的变量
// Process all points in the indices vector
for (int i = 0; i < static_cast<int> (cloud.points.size ()); ++i) //遍历点云中的每一个点
{
if (processed[i]) //如果该点已经处理则跳过
continue;
std::vector<int> seed_queue; //定义一个种子队列
int sq_idx = 0;
seed_queue.push_back (i); //加入一个种子
processed[i] = true;
while (sq_idx < static_cast<int> (seed_queue.size ())) //遍历每一个种子
{
// Search for sq_idx kdtree 树的近邻搜索
if (!tree->radiusSearch (seed_queue[sq_idx], tolerance, nn_indices, nn_distances))
{
sq_idx++;
continue; //没找到近邻点就继续
}
for (size_t j = nn_start_idx; j < nn_indices.size (); ++j) // can't assume sorted (default isn't!)
{
if (nn_indices[j] == -1 || processed[nn_indices[j]]) // Has this point been processed before ?
continue; // 种子点的近邻点中如果已经处理就跳出此次循环继续
// Perform a simple Euclidean clustering
seed_queue.push_back (nn_indices[j]); //将此种子点的临近点作为新的种子点。入队操作
processed[nn_indices[j]] = true; // 该点已经处理,打标签
}
sq_idx++;
}
// If this queue is satisfactory, add to the clusters 最大点数和最小点数的类过滤
if (seed_queue.size () >= min_pts_per_cluster && seed_queue.size () <= max_pts_per_cluster)
{
pcl::PointIndices r;
r.indices.resize (seed_queue.size ());
for (size_t j = 0; j < seed_queue.size (); ++j)
r.indices[j] = seed_queue[j];
// These two lines should not be needed: (can anyone confirm?) -FF
std::sort (r.indices.begin (), r.indices.end ());
r.indices.erase (std::unique (r.indices.begin (), r.indices.end ()), r.indices.end ());
r.header = cloud.header;
clusters.push_back (r); // We could avoid a copy by working directly in the vector
}
}
}
4、C++编写
adapt_cluster.h文件
#pragma once
#include <vector>
struct OBJPOINT
{
int nid;//ID
double dx;
double dy;
double dz;
double devp;//重投影误差
OBJPOINT()
{
nid = -1;
devp = 0;
}
};
class ADAPT_Cluster
{
public:
ADAPT_Cluster();
~ADAPT_Cluster();
void ImportPointCloud(char& filename);
void SetDate(std::vector<double*>& vPoints, double& R, int minPts, int maxPts);
bool RadiusSearch(OBJPOINT& mPoint, std::vector<std::pair<OBJPOINT, bool>>& mvPtStatusList); // Neighborhood radius search
void ExtractEuclideanClusters(); // Euclidean clustering
void slove(); // Test function
public:
double radius;
int minPtsPerCluster;
int maxPtsPerCluster;
private:
// The status of each point
std::vector<std::pair<OBJPOINT, bool>> vPtStatusList;
};
adapt_cluster.cpp 文件
#include <iostream>
#include <fstream>
#include "adapt_cluster.h"
ADAPT_Cluster::ADAPT_Cluster()
{
radius = 0;
minPtsPerCluster = 0;
maxPtsPerCluster = INT_MAX;
}
ADAPT_Cluster::~ADAPT_Cluster()
{}
void ADAPT_Cluster::ImportPointCloud(char& filename)
{
OBJPOINT temp;
bool mStatus = false;
std::ifstream import;
import.open(&filename);
while (import.peek() != EOF)
{
import >> temp.dx >> temp.dy >> temp.dz ;
vPtStatusList.push_back(std::pair<OBJPOINT, bool>(temp, mStatus));
}
import.close();
radius = 1;
minPtsPerCluster = 0;
maxPtsPerCluster = 1000;
}
void ADAPT_Cluster::SetDate(std::vector<double*>& vPoints, double& R, int minPts, int maxPts)
{
radius = R;
minPtsPerCluster = minPts;
maxPtsPerCluster = maxPts;
OBJPOINT mPt;
bool mStatus;
for (int i = 0; i < static_cast<int>(vPoints.size()); ++i)
{
mPt.dx = vPoints[i][1];
mPt.dy = vPoints[i][2];
mPt.dz = vPoints[i][3];
mStatus = false; // Initialize all point states
vPtStatusList.push_back(std::pair<OBJPOINT, bool>(mPt, mStatus));
}
}
bool ADAPT_Cluster::RadiusSearch(OBJPOINT& mPoint, std::vector<std::pair<OBJPOINT, bool>>& mvPtStatusList)
{
OBJPOINT nPt;
bool nStatus;
int num = 0; // Point within radius
for (int i = 0; i < static_cast<int>(vPtStatusList.size()); ++i) //Status is false
{
double dis = 0, disX, disY, disZ;
if (!vPtStatusList[i].second)
{
disX = (mPoint.dx - vPtStatusList[i].first.dx) * (mPoint.dx - vPtStatusList[i].first.dx);
disY = (mPoint.dy - vPtStatusList[i].first.dy) * (mPoint.dy - vPtStatusList[i].first.dy);
disZ = (mPoint.dz - vPtStatusList[i].first.dz) * (mPoint.dz - vPtStatusList[i].first.dz);
dis = sqrt(disX + disY + disZ);
if (dis < radius)
{
nPt.dx = vPtStatusList[i].first.dx;
nPt.dy = vPtStatusList[i].first.dy;
nPt.dz = vPtStatusList[i].first.dz;
nStatus = vPtStatusList[i].second;
mvPtStatusList.push_back(std::pair<OBJPOINT, bool>(nPt, nStatus));
num++;
}
}
}
if (num == 0)
return false;
else
return true;
}
void ADAPT_Cluster::ExtractEuclideanClusters()
{
std::vector<std::pair<OBJPOINT, bool>> seedvPtStatusList;
for (int i = 0; i < static_cast<int>(vPtStatusList.size()); ++i)
{
// Skip if the point has been processed
if (vPtStatusList[i].second)
continue;
vPtStatusList[i].second = true;
seedvPtStatusList.push_back(std::pair<OBJPOINT, bool>(vPtStatusList[i].first, vPtStatusList[i].second));
int n = 0;
while (n < static_cast<int>(seedvPtStatusList.size()))
{
std::vector<std::pair<OBJPOINT, bool>> RvPtStatusList;
if (!RadiusSearch(seedvPtStatusList[n].first, RvPtStatusList))
{
n++;
continue; // Continue without finding a neighbor
}
for (int j = 0; j < static_cast<int>(RvPtStatusList.size()); ++j)
{
seedvPtStatusList.push_back(std::pair<OBJPOINT, bool>(RvPtStatusList[j].first, RvPtStatusList[j].second));
for (int m = 0; m < static_cast<int>(vPtStatusList.size()); ++m)
{
if (RvPtStatusList[j].first.dx == vPtStatusList[m].first.dx &&
RvPtStatusList[j].first.dy == vPtStatusList[m].first.dy &&
RvPtStatusList[j].first.dz == vPtStatusList[m].first.dz &&
vPtStatusList[m].second == false)
{vPtStatusList[m].second = true; break;}
}
}
RvPtStatusList.clear();
n++;
}
// Judge the number of each category
if (seedvPtStatusList.size() >= minPtsPerCluster && seedvPtStatusList.size() <= maxPtsPerCluster)
{
for (int a = 0; a < static_cast<int>(seedvPtStatusList.size()); ++a)
{
std::cout << seedvPtStatusList[a].first.dx << " "
<< seedvPtStatusList[a].first.dy << " "
<< seedvPtStatusList[a].first.dz << std::endl;
}
}
std::cout << std::endl;
seedvPtStatusList.clear();
}
}
void ADAPT_Cluster::slove()
{
char filename[255];
sprintf_s(filename, 255, "import3.asc");
ImportPointCloud(*filename);
ExtractEuclideanClusters();
}
int main()
{
ADAPT_Cluster mADAPT_Cluster;
mADAPT_Cluster.slove();
return 0;
}
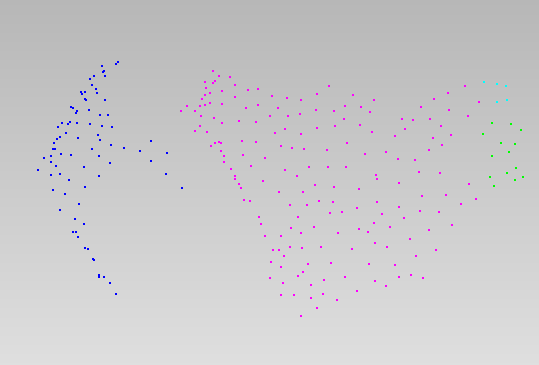
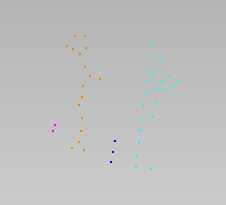
5、测试效果















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









