






官网:https://www.codaoctopus.com/products/3d/PIPE
概述
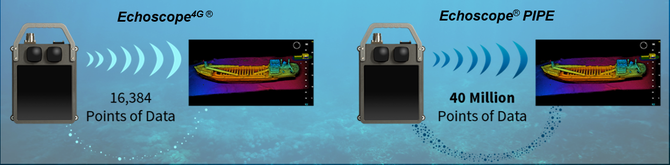
5-D 和 6-D Echoscope PIPE ®声纳嵌入了公司新的创新型高性能可扩展实时并行处理引擎。目前市场上的 Echoscope ® 变体可以使用一组处理参数在声纳视野范围内每 ping 输出多达 16,384 个点。在我们的新型 5-D 和 6-D 声纳中,我们可以捕获(用于离线波束成形)和处理每 ping 多达 8100 万个点的完整反向散射(3D 时间序列)数据,同时还可以实时提供这些数据以供高端可视化和处理。在一系列高级信号处理选项的支持下,Echoscope PIPE ® 具有革命性,因为它允许我们的客户访问所有可用的声纳数据以实现多个 同时 输出,例如具有不同处理的多个 4D 图像和/或具有更大范围和图像保真度的完整反向散射(时间序列)输出——所有这些都可以通过单个传感器实时完成。从复杂的现场操作到自动驾驶汽车数据收集任务,这项技术和能力为海洋监测和测绘带来了范式转变。


3D到6D的迭代过程
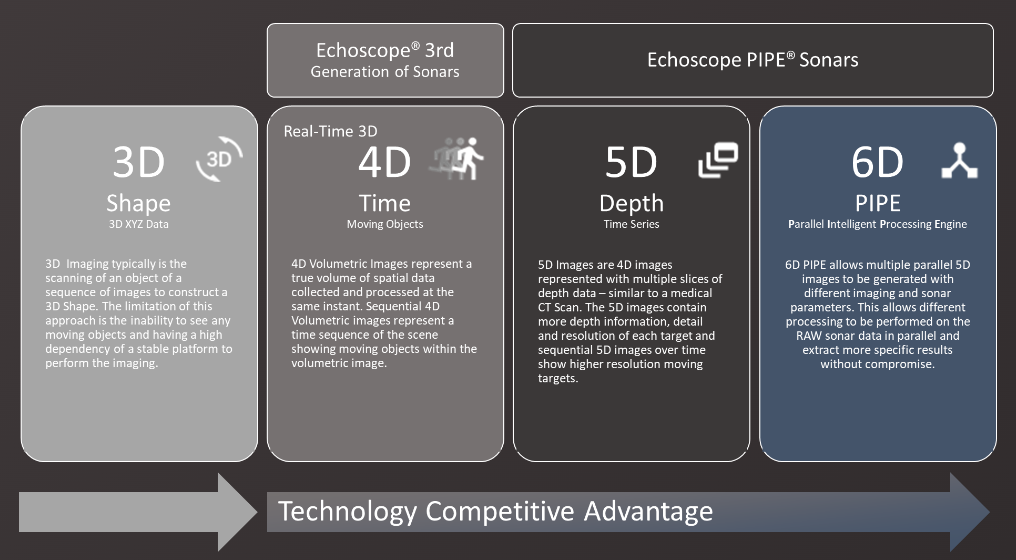
3D: xyz(提供位置信息,对物体扫描成像,类似扫描仪,用于静态物体扫描,无法实时,缺少时间维度,不能对动态物体成像。)
3D成像通常是对物体进行扫描构建三维形状的图像序列。这种方法的局限性在于无法看到任何移动的物体,并且高度依赖稳定的平台来进行成像。
4D: 时间(比3D多了时间维度,可以实时成像,实时更新)
4D体积图表示空间数据的真实体积同时收集和处理。连续的4D体积图像表示场景的时间序列显示体积图像中的运动物体。
5D: 深度(5D比4D多了深度数据,由多个4D切片按照深度数据组合,类似与医学中的CT扫描)
5D图像是4D图像用多个深度数据切片表示–类似于医学 CT 扫描。5D 图像包含更多深度信息、每个目标的细节和分辨率,随着时间的推移连续的 5D 图像显示更高分辨率的移动目标。
6D: 并行智能处理引擎(多个5D图像并行处理,)
6D PIPE 允许使用不同的成像和声纳参数生成多个平行的 5D 图像,从而可以并行地对原始声纳数据进行不同的处理,在不妥协的情况下提取更具体的结果。
这项突破性技术能够处理可视范围内的所有声学 3D 反向散射数据(每 ping(180x180x2,500)高达 8100 万个点),这是 CODA 的 5-D 全时系列功能。处理完整的反向散射体积现在可以扩大目标的范围、覆盖范围和密度,能够在单个波束覆盖范围内(4D)检测多个目标,并提供目标和海床周围的关键振幅数据,例如层或海洋生长或沉积物渗透。
该公司的新型 6D 系统以 5D 全时系列为基础,可使用不同的处理参数同时并行和按顺序实时处理和可视化多个 4D 实时图像。4D 图像可通过不同的设置进行处理,包括视野、范围窗口、波束检测方法和许多声学和波束形成滤波器选项。Echoscope PIPE ®系列声纳允许使用各种实时波束形成选项,以使用户获得最佳结果。高级波束形成就是这样一种选项,它允许用户实时更改视野以优化目标成像,并管理目标上的波束数量(例如增加波束密度),从而提高被成像水下物体的分辨率和清晰度。
值得注意的是,Echoscope PIPE ®可以通过网络并行提供这些多个 4D 成像输出,从而允许不同的用户订阅他们所需的不同图像输出。
例如,单个 Echoscope ® 5-D 或 6-D 传感器可部署在遥控机器人 (ROV) 上,用于油田中复杂的基础设施测绘,并可同时提供实时体积输出,例如用于构建基础设施或海床 3D 模型的近场高分辨率 4D 图像,以及设置为远距离的第二个 4D 图像,视野更窄,可用于避障。此外,该系统可捕获完整的 5-D 反向散射数据,以便在 PIPE 中进一步离线处理,以检测海底的油斑或管道中的气体泄漏。
能够在勘测或检查之前使用特定的波束成形参数和波束检测方法指定这些多图像要求,意味着 PIPE 可以使许多其他传感器变得冗余,从而降低复杂性、功耗和重量,并显著降低成本并提高生产率。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











