






1 引言
陆地车在经过城市峡谷、隧道等严重遮挡环境时,GNSS定位精度较差。为了防止低精度的INS发散较快,可以通过非完整约束和轮速计来进行约束。
注:为便于理解INS/NHC/ODO组合导航原理,本文不考虑IMU和陆地车间的安装角(即,IMU和陆地车坐标系安装角为零)和ODO系数误差(即,比力因子)
2 原理
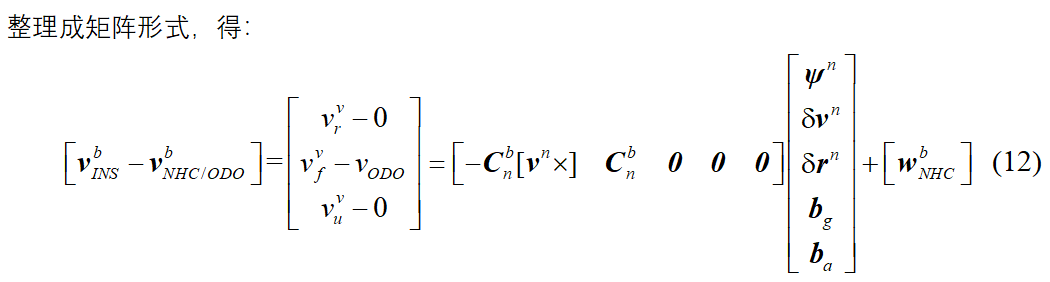
陆地车在不发生跳跃和侧滑时,其垂直于前进方向的后轮速度近似为零,且陆地车的前向速度近似等于轮速计的速度。





3 结果
通过在严恭敏老师的PSINS平台中仿真,对比了INS和INS/NHC/ODO的定位精度。
3.1 仿真轨迹:

3.2 INS/NHC/ODO轨迹:

3.3 纯INS轨迹

从轨迹图中可以看出,INS/NHC/ODO的轨迹和仿真轨迹基本一致,而纯INS的轨迹已经面目全非,由此可以看出NHC/ODO对INS的约束效果还是十分明显的。
注: 程序已挂 “xian鱼”,可搜索 “油菜花VS蔓菁花” 拍!
4 参考
[1] Wu Yuanxin. Versatile Land Navigation Using Inertial Sensors and Odometry Self-calibration, In-motion Alignment and Positioning.














 284
284











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









