







主要分成四步:立体像对选择,深度图计算,深度图优化,深度图融合
1.立体像对选择
利用空三(SFM)计算出的相机位姿和三维稀疏点,可以计算出相机不同位姿下的平均夹角aij,文中取5°<aij<60°(条件1);另外取相机位置之间的距离dij,d0为所有相机距离的中值,去除dij>2d0或dij<0.05d0的图像,剩余的满足条件1的作为一组立体匹配像对N(i)。
如果N(i)中影像数量大于k1,则根据aij*dij进行排序,取前k1张作为一组立体匹配影像(文中k1取10)。
2.深度图计算
2.1 初始化平面
利用法向量n和三维点云X来表示一个平面,如下图所示。

其中在相机Ci坐标系下,Xi = λ((Ki)^−1) p,初始化时取λ ∈ [λmin , λmax ],
论文中θ is a random angle in the range [0˚, 360˚], and φ is a random angle in the range[0˚, 60˚].
2.2 计算匹配代价
首先计算出相机Ci坐标系下所有像素点(每个像素点对应着一个初始化的平面)到相机Cj坐标系下的单应性矩阵,计算公式如下:

在相机Ci下,取影像上某一像素点p,以像素点p为中心获取周围窗口大小为w * w的像素点,通过计算每个像素点至相机Cj坐标系下的单应性矩阵,将每个像素点投影至相机Cj的影像上,计算NCC(Normalized Cross Correlation)
注:优化NCC方法文中未提及,采用梯度下降法方法?
2.3 传播和抖动优化平面
迭代处理影像Ii中的每个像素点,迭代次数文中设为3;奇数次迭代时,从左上角开始往右下角传播,偶数次迭代时,从右下角开始往左上角传播;
每次传播时分成两步,空间传播和随即抖动
空间传播
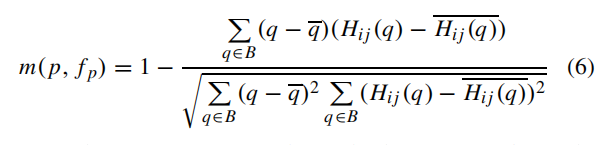
Let pN denote the neighborhood of the current pixel p, and f pN denote pN ’s plane, we use the matching cost in Eq.6 to check the condition m(p, f pN ) < m(p, f p). If this condition is satisfified, we consider f pN is a better choice
for p compared to its current plane f p, and propagate f pN to p, . set f p = f pN .
就是利用某一像素点p的邻域像素点pn的平面,将Pn对应的平面{ni,X}用来进行像素点p的代价计算,若计算出的代价值低于该像素点p平面计算出的代价值,则将像素点p的平面替换成邻域像素点pn的平面。
随机抖动
空间传播计算完成后,对每个像素点的平面进行一定程度上的随机抖动,例如给定一个抖动范围{λ, θ , φ},计算抖动后的平面所对应的代价值,若小则取该平面作为该像素点的平面。文中设定抖动次数为6次
传播和抖动完成后,将代价值m大于0.3的点作为不可靠点进行去除。
3 深度图优化
在影像Ii中将每个像素点的深度值通过下列公式投影为世界坐标系下的3D点X。

将世界坐标系下该3D点X投影至影像Ii的邻域影像N(i)坐标系下,获得该3D点在邻域影像N(i)坐标系下的深度d(X,Nk),将其与影像N(i)上该像素点计算出的深度λ(X, Nk )进行比较
若满足上列等式(文中τ2 = 0.01),则记为该点X在影像I和影像N(i)上是一致的,若是满足一致性的邻域影像超过2张,则该点保留,否则去除。
4 深度图融合
由于多张影像中可能会对同一点进行重复计算,因此需要去除这种冗余点。


如上图所示,先将影像Ci的深度图转化为世界坐标系下的3D点云X,然后将3D点投影至其相邻影像中,
若是该点深度小于相邻影像深度(如N1和N2),则说明X在这个邻近相机中的投影被遮挡,并将其从这个邻近相机的深度图中移除;
若是该点深度与相邻影像深度很接近(如N4),说明这两个点是同一点,也将其从邻域影像中去除。















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









