







任务:Action Classification and pose estimation
思路:将每个动作划分成一系列子动作,为每个子动作训练独立模型,预测pose,而后pose特征返回来精化动作分类
方法:action划分,子类划分,SVM,DPMs
1.intro
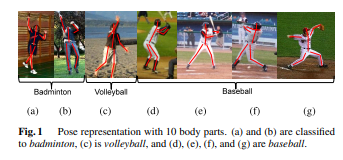
主要针对动作识别和姿态估计的方法进行了简单论述,然后点名了姿态和动作是相互关联的。
其次,还提到每个action类别还有姿态差异很大的子动作。
2.贡献:
(1)通过多个DPMs改进姿态估计,每个DPMs都针对每个动作进行优化
(2)使用估计的姿态作为局部特征与全局图像特征合并进行动作分类
3. Overview of the Proposed Method
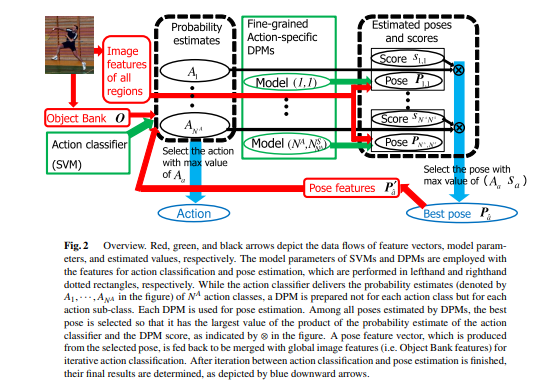
下面主要说的是model(x, y)代表的啥,也就是action x 下的 子类 y
3.1 Action Classification Using Global Features
通过SVM和Object Bank feature得到动作分类,图中的左边虚线框内
3.2 Pose Estimation Using DPMs
每个子动作样本训练出的DPMs来做姿态估计,由于经过了分类,因此预测更加准确
4. Iterative Action Classification and Pose Estimation
这部分讲的是两个任务的迭代过程,
4.1 Initial Action Classification with High-Dimensional Global Features
这个部分跟3.1是一样的,也就是初次动作识别过程,
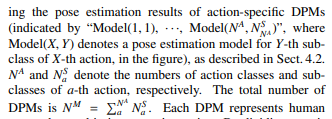
4.2 Pose Estimation by Fine-Grained Action-Specific DPMs and Action Probability
这一部分是讲的如何训练每个action子类sub action的DPMs的,如下图也就是先用
action A样本去训练A下面的所有子类DPMs,然后再分别用A下面的子类,单独训练每个DPMs
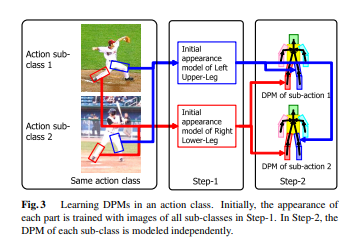
最后选择预测评分最高的那个DPMs预测出来的pose
![]()
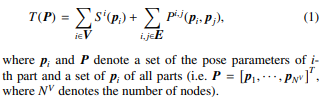
4.3 Action Classification with Global and Pose Features
最后将pose特征和之前的全局特征融合,得到精化后的动作识别。
直接拼接特征
![]()















 1652
1652











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









