







关于move_base包的理解
move_base是ROS下关于机器人路径规划的中心枢纽。
它通过订阅激光雷达、map地图、amcl的定位等数据,然后规划出全局和局部路径,再将路径转化为机器人的速度信息,最终实现机器人导航。
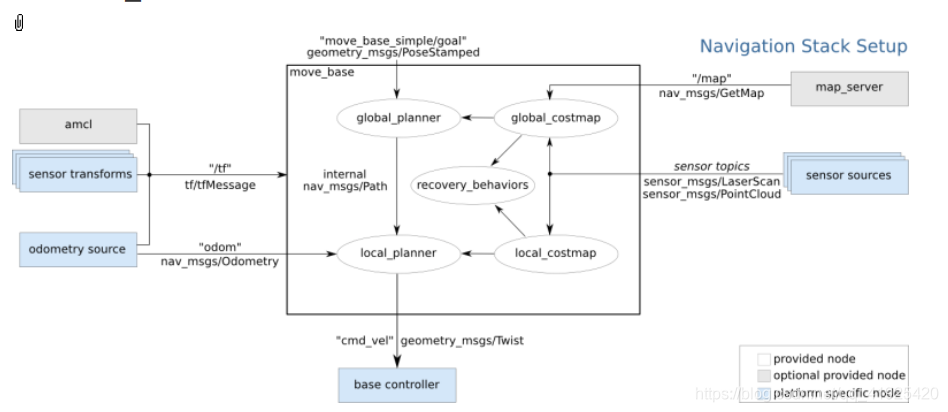
上面这个图很好的展示了move_base的整个框架,下面我更加详细的介绍一下每个模块的功能及其是如何衔接的。
首先amcl模块是ROS的导航定位模块,amcl也叫自适应蒙特卡罗定位,amcl通过订阅scan、map和tf信息,发布出机器人的pose,以供move_base使用,这部分具体可以上官网看看,这里就不做详细介绍了,左下角odom,即机器人里程计信息,右上角,map,顾名思义,我们需要的先验地图信息,一般通过slam建图后保存,ROS中主流的slam算法有:
1.gmapping:需要激光雷达scan数据和里程计odom数据,采用的是PF(粒子滤波)。
2.hector :基于优化的算法(解最小二乘问题),优缺点:不需要里程计,但对于雷达帧率要求很高40Hz,估计6自由度位姿,可以适应空中或者地面不平坦的情况。初值的选择对结果影响很大,所以要求雷达帧率较高。
3.Cartographer:累计误差较前两种算法低,能天然的输出协方差矩阵,后端优化的输入项。成本较低的雷达也能跑出不错的效果。map_server包通过解析slam建好的地图并发布出去。
右下角的传感器topic则在局部路径规划时起到作用,这部分就是costmap包起到的作用了,costmap为代价地图,目前主要的有inflation_layer、obstacle_layer、static_layer、voxel_layer四个plugins。分别为膨胀层、障碍物层、静态层和体素层。一般我们的全局路径需要静态层和膨胀层,因为全局规划应该只考虑到地图信息,所以一般都是静态的,而局部路径规划则需要考虑到实时的障碍物信息,所以需要障碍物层和膨胀层,这里你可能会有疑惑,为什么不把静态层放到局部路径规划里呢?因为我们的定位是会存在误差的,比如轮子打滑或其他情况,这个时候amcl会起到纠正作用,如果我们把静态层放到了局部中,这个定位会有问题,而且,假设当前机器人出现了定位的偏差,那么这个引入的静态层肯定是错误的,再加上局部的障碍物层(这里的障碍物层本应该和静态层重合的,但由于定位偏差,不会重合)可能会使得机器人误以为自己在障碍物层内,规划出现问题。
下面我们我们说说move_base核心的部分了,也就是框框内的部分,主要包括global planner和local planner以及一些修复机制,包括rotate_recovery和clear_cost_map_recovery。有人可能会问
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2400
2400

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









