






一:基本介绍
1:产品介绍
EC35编码器主要用于频率调节,高度调节,温度调节及音量调节等参数调节。注意编码器避免储藏于高温潮湿及腐蚀的场所,拆包装后未使用完的剩余产品请在防潮防毒的环境下保存。
2:产品参数:
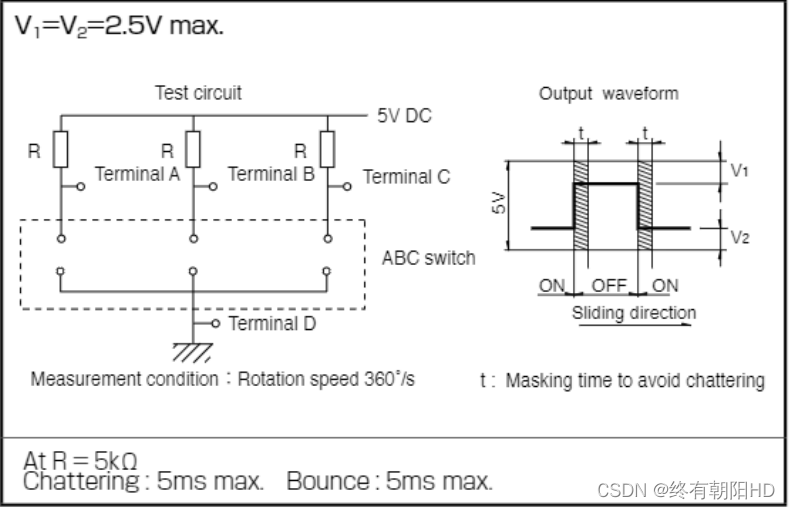
额定:10mA 5VDC
使用温度范围:–40ˆ to +85℃
输出电压:1mA 5V DC(电阻负载)时 2.5V以下
耐电压:300V AC for 1minute
操作寿命:50,000cycles
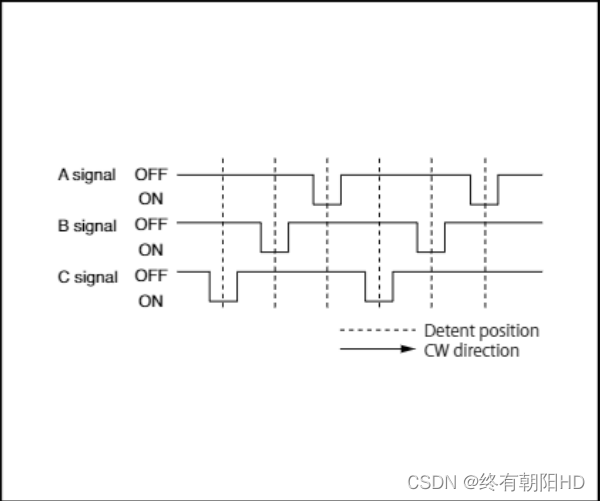
3:输出波形
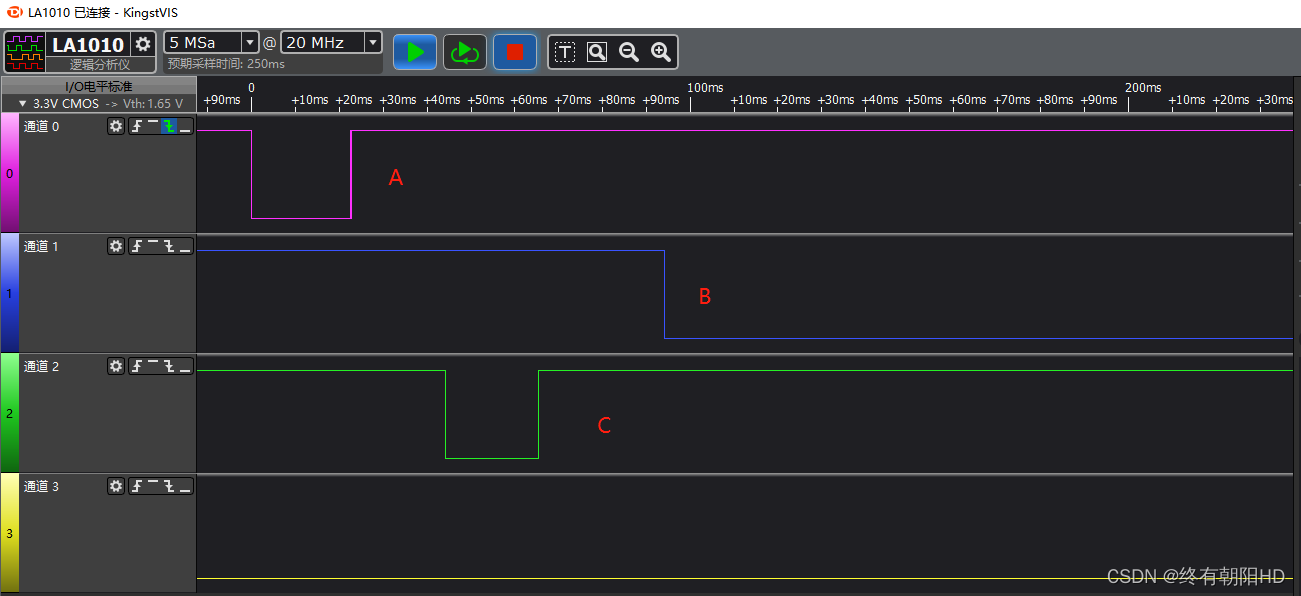
逻辑分析仪测试的正转波形
逻辑分析仪测试的反转波形
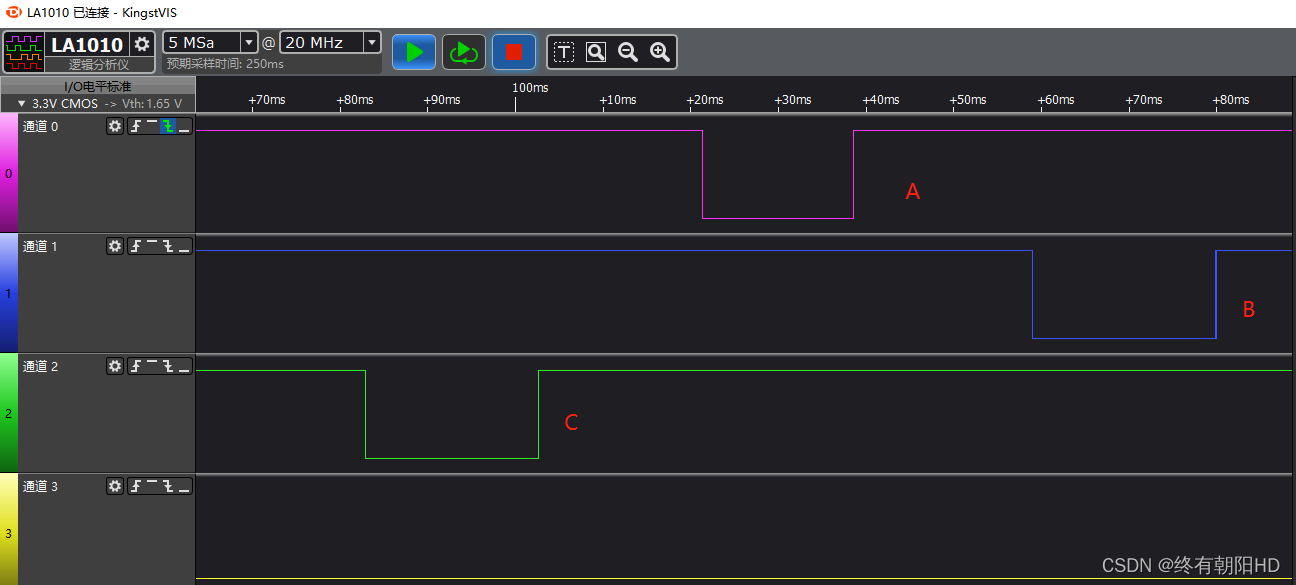
4:原理分析
由逻辑分析仪测试的波形可知,以A为触发源,当编码器正转的时候,C先变为低电平,紧接着是B。所以编码器正转时波形变化为依次为:A—C—B—A—C....。同理可知编码器反转时波形变化为依次为:A—B—C—A—B....
二:程序设计
1:程序思路
本篇设计为编码器三个引脚中任意一个引脚触发单片机中断后,通过单片机读取另外两个引脚的状态,从而判断旋钮旋转方向。
以A引脚为例:将连接编码器引脚A的单片机引脚设置为上升沿触中断,当该引脚触发中断后,如果先读到B变低电平,则此时编码器为反转。如果先读到C变低电平,则此时编码器为正转。
同理以B引脚为例:将连接编码器引脚B的单片机引脚设置为上升沿触中断,当该引脚触发中断后,如果先读到C变低电平,则此时编码器为反转。如果先读到A变低电平,则此时编码器为正转。
........
2:程序编写
①:初始化初始化EC35编码器 A B C 三个引脚
/* 初始化EC35编码器 A B C 三个引脚 */
rcu_periph_clock_enable(EC35_A_CLK);
gpio_init(EC35_A_PORT,GPIO_MODE_IPU,GPIO_OSPEED_50MHZ,EC35_A_PIN);
rcu_periph_clock_enable(EC35_B_CLK);
gpio_init(EC35_B_PORT,GPIO_MODE_IPU,GPIO_OSPEED_50MHZ,EC35_B_PIN);
rcu_periph_clock_enable(EC35_C_CLK);
gpio_init(EC35_C_PORT,GPIO_MODE_IPU,GPIO_OSPEED_50MHZ,EC35_C_PIN);②:设置中断
rcu_periph_clock_enable(RCU_AF);//打开复用时钟
nvic_priority_group_set(NVIC_PRIGROUP_PRE2_SUB2);//选择优先级组
/* 配置EC35编码器 C 引脚中断 */
nvic_irq_enable(C_EXTIx_IRQn, 2U, 0U);//配置抢占优先级、子优先级
gpio_exti_source_select(C_PORT_SOURCE_GPIOx, C_PIN_SOURCE_x );//配置中断源
exti_init(C_EXTI_x, EXTI_INTERRUPT, EXTI_TRIG_FALLING);//配置中断方式
exti_interrupt_flag_clear(C_EXTI_x);//清除标志位
/* 配置EC35编码器 B 引脚中断 */
nvic_irq_enable(B_EXTIx_IRQn, 2U, 1U);
gpio_exti_source_select(B_PORT_SOURCE_GPIOx, B_PIN_SOURCE_x);
exti_init(B_EXTI_x, EXTI_INTERRUPT, EXTI_TRIG_FALLING);
exti_interrupt_flag_clear(B_EXTI_x);
/* 配置EC35编码器 A 引脚中断 */
nvic_irq_enable(A_EXTIx_IRQn, 2U, 2U);
gpio_exti_source_select(A_PORT_SOURCE_GPIOx, A_PIN_SOURCE_x);
exti_init(A_EXTI_x, EXTI_INTERRUPT, EXTI_TRIG_FALLING);
exti_interrupt_flag_clear(A_EXTI_x);③:初始化串口
#include "gd32f303r_start.h"
static rcu_periph_enum COM_CLK[COMn] = {EVAL_COM1_CLK, EVAL_COM2_CLK};
static uint32_t COM_TX_PIN[COMn] = {EVAL_COM1_TX_PIN, EVAL_COM2_TX_PIN};
static uint32_t COM_RX_PIN[COMn] = {EVAL_COM1_RX_PIN, EVAL_COM2_RX_PIN};
static uint32_t COM_GPIO_PORT[COMn] = {EVAL_COM1_GPIO_PORT, EVAL_COM2_GPIO_PORT};
static rcu_periph_enum COM_GPIO_CLK[COMn] = {EVAL_COM1_GPIO_CLK, EVAL_COM2_GPIO_CLK};
void gd_eval_com_init(uint32_t com)
{
uint32_t com_id = 0U;
if(EVAL_COM1 == com){
com_id = 0U;
}else if(EVAL_COM2 == com){
com_id = 1U;
}
/* enable GPIO clock */
rcu_periph_clock_enable(COM_GPIO_CLK[com_id]);
/* enable USART clock */
rcu_periph_clock_enable(COM_CLK[com_id]);
/* connect port to USARTx_Tx */
gpio_init(COM_GPIO_PORT[com_id], GPIO_MODE_AF_PP, GPIO_OSPEED_50MHZ, COM_TX_PIN[com_id]);
/* connect port to USARTx_Rx */
gpio_init(COM_GPIO_PORT[com_id], GPIO_MODE_IN_FLOATING, GPIO_OSPEED_50MHZ, COM_RX_PIN[com_id]);
/* USART configure */
usart_deinit(com);
usart_baudrate_set(com, 9600U);
usart_receive_config(com, USART_RECEIVE_ENABLE);
usart_transmit_config(com, USART_TRANSMIT_ENABLE);
usart_enable(com);
}
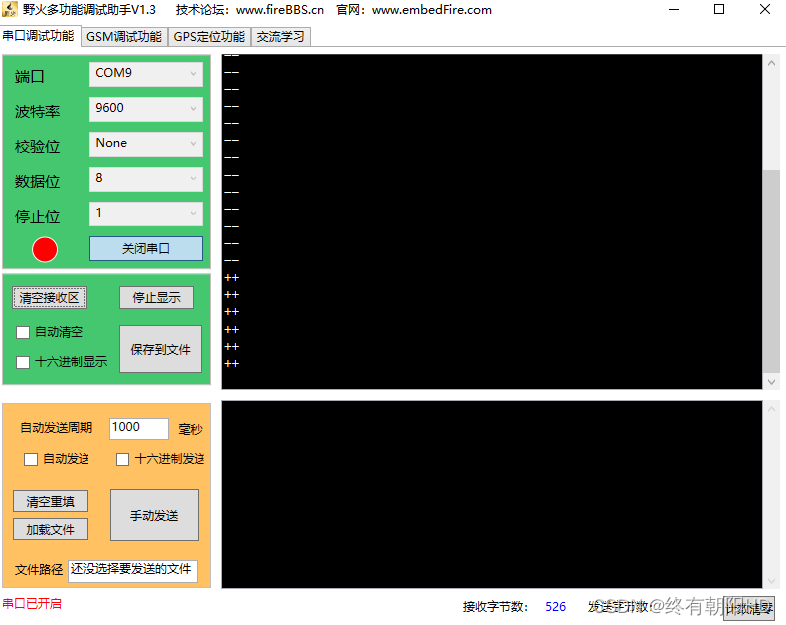
④:中断函数,当编码器正转时串口打印 ++ 当编码器反转时串口打印 --
/*
如果先读到A引脚为低电平,则代表编码器此时正转。
如果先读到B引脚为低电平,则代表编码器此时反转。
*/
void EXTI10_15_IRQHandler(void)
{
static int a;
if(RESET != exti_interrupt_flag_get(C_EXTI_x))
{
for(a=0;a<200;a++)//调节a<x,可修改读取时间,x最低不可低于200
{
if(A_STATUS==RESET)//如果先读到A引脚为低电平,则代表编码器此时正转。
{
printf("--\n");
break;//跳出循环
}
else if(B_STATUS==RESET)//如果先读到B引脚为低电平,则代表编码器此时反转。
{
printf("++\n");
break;//跳出循环
}
delay_1ms(1);
}
exti_interrupt_flag_clear(C_EXTI_x);
}
}
/*
如果先读到A引脚为低电平,则代表编码器此时正转。
如果先读到C引脚为低电平,则代表编码器此时反转。
*/
void EXTI5_9_IRQHandler(void)
{
static int a;
if(RESET != exti_interrupt_flag_get(B_EXTI_x))
{
for(a=0;a<200;a++)
{
if(A_STATUS==RESET)
{
printf("++\n");
break;
}
else if(C_STATUS==RESET)
{
printf("--\n");
break;
}
delay_1ms(1);
}
exti_interrupt_flag_clear(B_EXTI_x);
}
}
/*
如果先读到C引脚为低电平,则代表编码器此时正转。
如果先读到B引脚为低电平,则代表编码器此时反转。
*/
void EXTI4_IRQHandler(void)
{
static int a;
if(RESET != exti_interrupt_flag_get(A_EXTI_x))
{
for(a=0;a<200;a++)
{
if(C_STATUS==RESET)
{
printf("++\n");
break;
}
else if(B_STATUS==RESET)
{
printf("--\n");
break;
}
delay_1ms(1);
}
exti_interrupt_flag_clear(A_EXTI_x);
}
}
⑤:main.c文件
#include "gd32f30x.h"
#include "gd32f303r_start.h"
#include "systick.h"
#include <stdio.h>
#include "EC35.h"
int main(void)
{
systick_config();
gd_eval_com_init(EVAL_COM1);
EC35_Init();
while(1)
{
}
}
/* retarget the C library printf function to the USART */
int fputc(int ch, FILE *f)
{
usart_data_transmit(EVAL_COM1, (uint8_t)ch);
while(RESET == usart_flag_get(EVAL_COM1, USART_FLAG_TBE));
return ch;
}
3:运行结果















 452
452











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









