






-
舵机结构
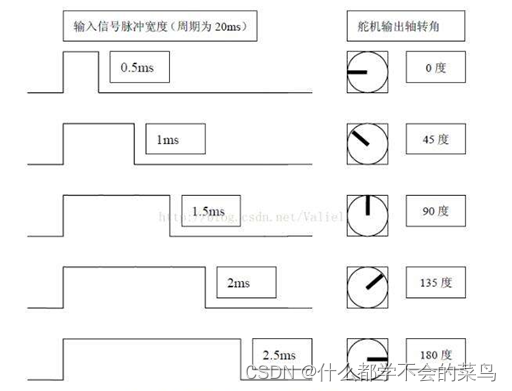
舵机是我们常用到的末端执行器,但是在应用时我们只知道利用一定频率和周期的PWM来控制其摆动一定角度。及控制器给舵机一个周期为20ms的PWM波,高电平时间为0.5ms时对应0°,高电平时间为2.5ms时对应180°。以上规律适用于大多数180°摆角的舵机。控制规律如下图:
拆解一个常见的多家结构如下,舵机外壳里面有减速齿轮组、电位器、直流电机和舵机内部电路板。电位器用于反馈输出轴的角度,以电阻值反馈到内部电路板,直流电机由内部电路板直接控制进行正反转,内部电路板接收来自外部的PWM信号和电位器的反馈信号,进行比较之后判断并输出执行指令给直流电机,就能实现定角度的控制。

-
内部控制电路原理
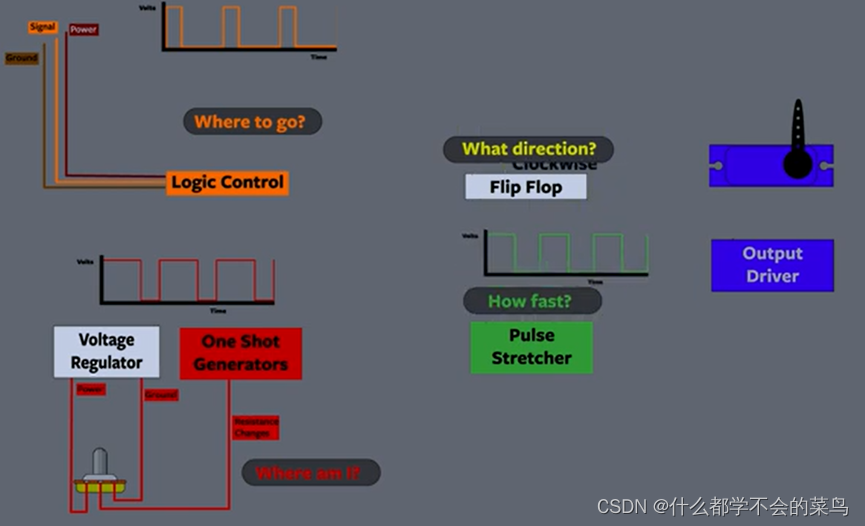
基于上述结构原理,这里要说的是其内部电路运行原理。上面提到的电位器就是要告诉电路板“我在哪?”,而PWM控制信号告诉电路板“我要去哪?”,经过电路板的判断得出“我怎么去那?”。
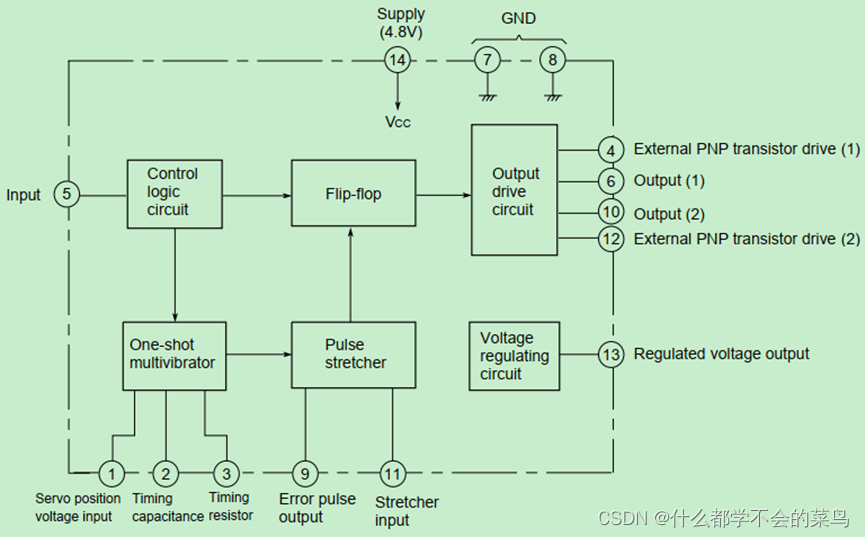
下图是舵机控制芯片M51660L内部构造和信号处理示意图。电位器的电压信号经过单稳态多谐振荡器(One-shot multivibrator)转换成PWM信号,与输入的PWM指令进行对比,比较器比较两个脉冲,比较的结果发送给触发器(flip-flop),得到顺时针还是逆时针旋转,随后经过脉冲扩展器(pulse stretcher)得出应该以多块的速度达到目的,最后经过H桥至执行电机。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









