






Rsi文件说明

上图中有四个文件,我们只需要简单的修改一下其中的RSI_Ethernet.rsi和RSI_EthernetConfig.xml就可以了,其中RSI_Ethernet.rsi主要是配置rsi的信号输出输入、数字的写入写出、当前机器人的位置、轴信息等,RSI_EthernetConfig.xml主要是配置机器人发给上位机的数据和上位机发给机器人的JSON格式,下面进行详细介绍
RSI_Ethernet.rsi说明介绍

以上图举例说明
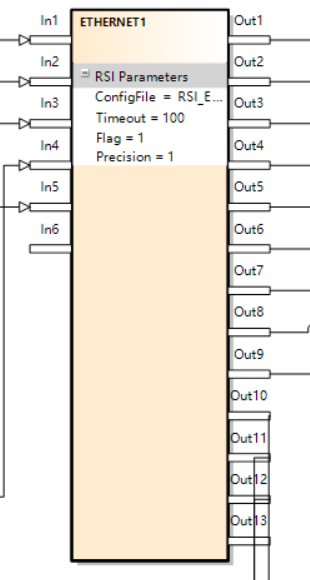
上图为主要的通讯模块,其中IN这边是作为机器人输出的节点,OUT为机器人输入的节点,点击后可以进行属性配置;

上图为机器人信号$IN[601]的值进行rsi输出给上位机
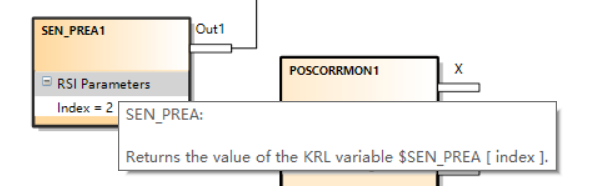
上图为机器人中$SEN_PREA[2]的值传输给上位机

上图为上位机输出给机器人的数据,out1对应的机器人的X轴,给的值为机器人的偏移值

上图为上位机输出给机器人$OUT[601]值,具体格式在另一个文档中配置
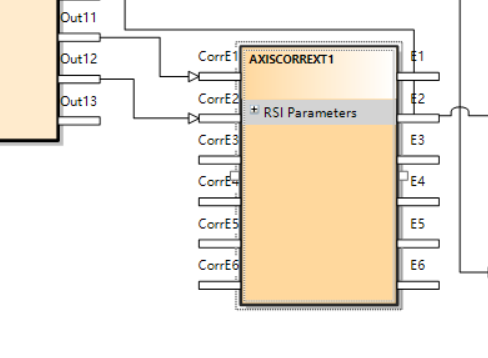
上图为上位机给机器人外部轴的偏移数据
RSI_EthernetConfig.xml介绍说明

最上面的IP设置为机器人网络配置的混合IP要同一个字段,要与上位机设置IP为一样,要不无法通讯上
Send下面的格式文件为机器人发送给上位机的数据,其中tag为数据的名称,type为对应的类型,indx为对应的来源;
如第一行的DEF_RSOL为机器人的当前坐标,数据为double类型,来源为集成内部的(内部的需要对应好名称)
对比第五行的deviceError的为BOOL类型,index的来源为1,对应的为in1;

Recive 下面为上位机发送给机器人的格式,按照对应键值对的格式发送字符串即可,由编写上位机的人员进行编写
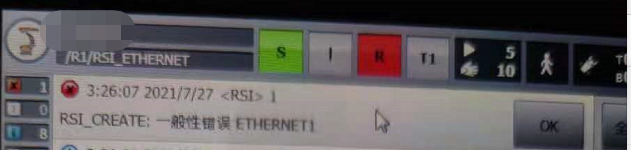
出现此错误的主要原因是RSI_EthernetConfig.XML文件格式错误,如果自己检查一遍还是没有格式问题的话,建议重新再编辑输出输入的键值对数据,我检查的过程中也没发现格式错误,但是重新编辑后程序正常;















 3212
3212











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









