






点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达背景
激光扫描三维测量技术凭借其非接触、精度高、适用范围广等优点,目前已经成为工业领域中不可或缺的技术,具有很高的研究价值。该项技术被广泛用于产品缺陷检查、自动化装配、尺寸测量、文物重建和视觉导航等领域,具有非常高的实用价值。原理
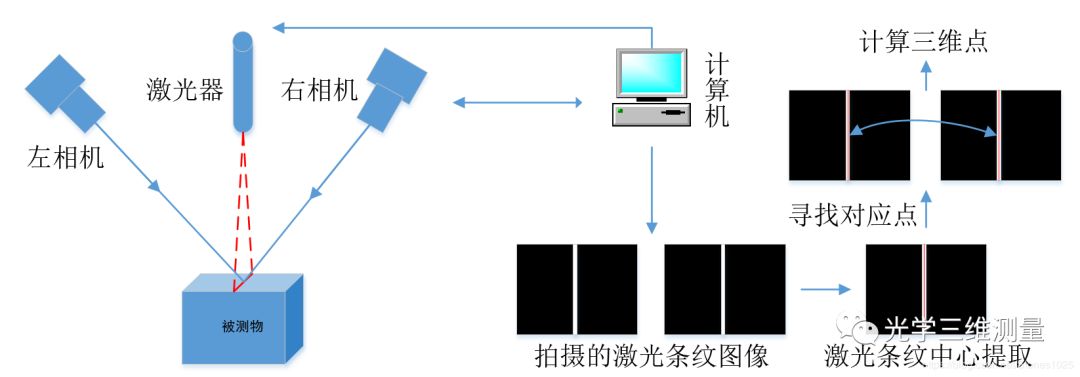
本文介绍的是一种基于线激光扫描和双目立体视觉相结合的三维测量系统,该种线激光扫描系统可以避免传统单相机扫描技术中标定激光平面的过程,提高三维测量精度。该测量系统由两个相机、一个先激光投射器和一个旋转电机组成,如图1所示,测量时通过向被测物体投射单条线激光条纹,然后由旋转电机带动激光条纹扫描整个被测物体,扫描的同时立体视觉系统以指定的帧率拍摄被测物体;根据所拍摄的含有激光条纹的立体图像对,由立体视觉的极线约束和激光条纹特征计算出立体视觉系统之间的对应性关系;最后根据预先标定好的系统参数按照双目立体视觉的方法计算出物体的三维点云数据。
算法流程
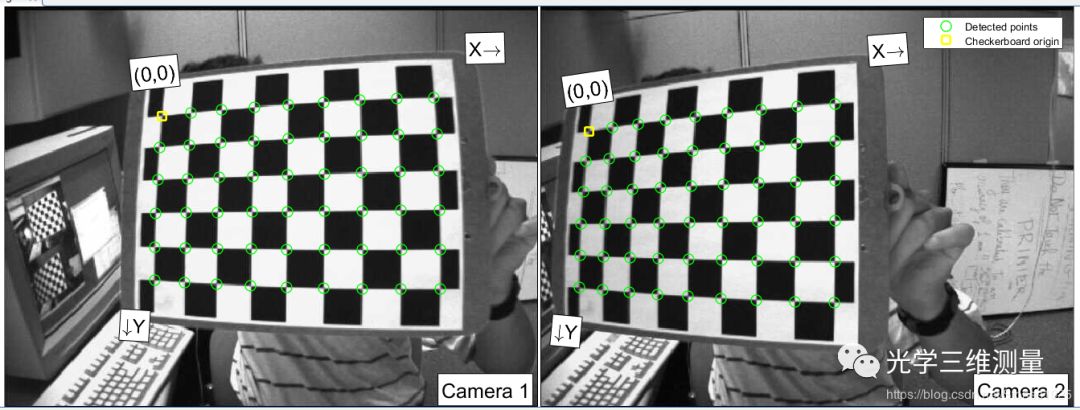
系统标定(单相机标定和立体视觉系统标定);
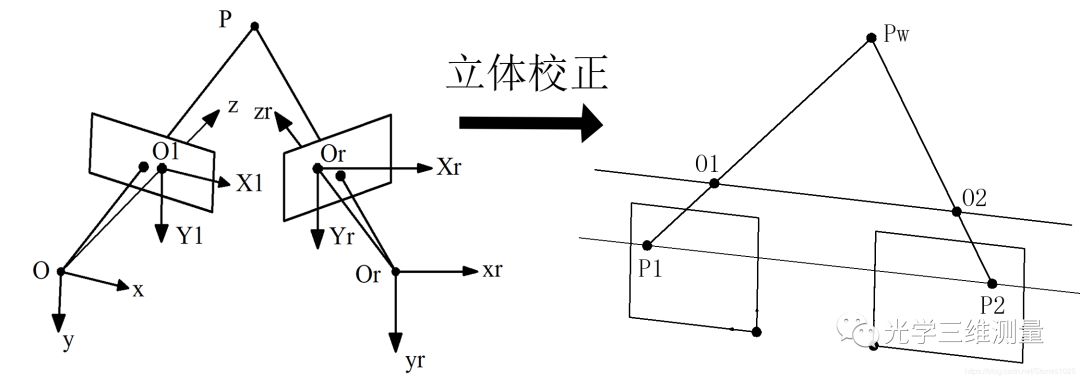
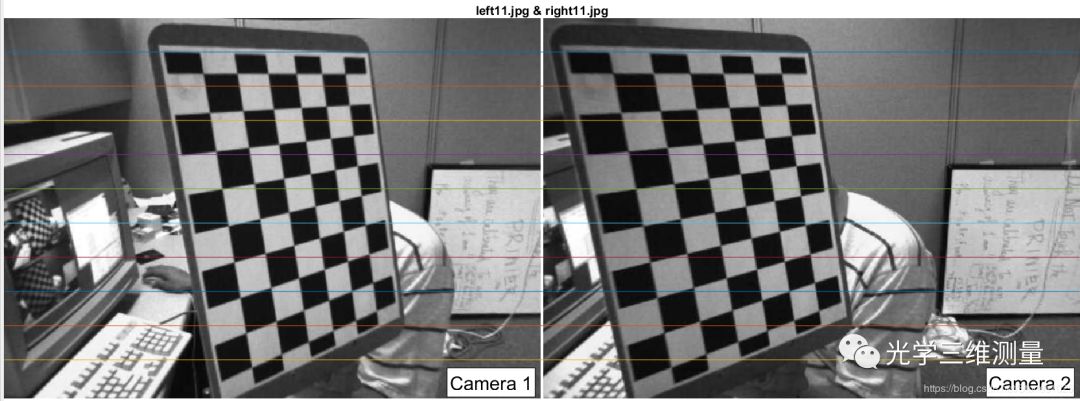
2. 立体视觉校正;
3.线激光条纹中心提取;
传统的线激光条纹提取技术有极值法、阈值法、高斯拟合法、灰度重心法等。

4.查找立体视觉对应性;
在双目线激光扫描三维测量系统中,使用两个约束来唯一确定立体视觉对应性。第一,极线约束;第二,线激光条纹的几何属性。使用该两个属性即可唯一确定立体视觉的对应点坐标。
5.三维重建。
该部分比较简单,直接使用光学三角法即可。
测量案例
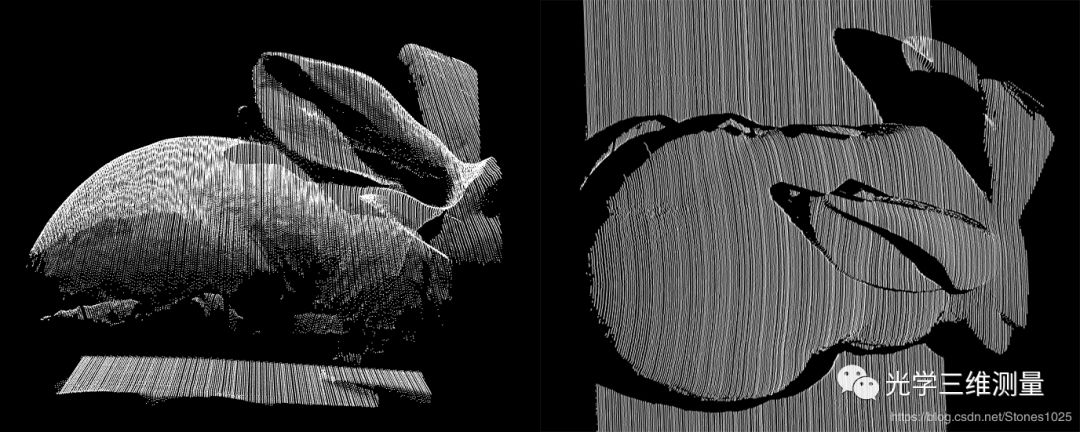

来源:光学三维测量
声明:部分内容来源于网络,仅供读者学习、交流之目的。文章版权归原作者所有。如有不妥,请联系删除。
下载1:OpenCV-Contrib扩展模块中文版教程
在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。
下载2:Python视觉实战项目52讲
在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。
下载3:OpenCV实战项目20讲
在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~













 1343
1343











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









