






点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达机器视觉的硬件中,光源为视觉系统提供足够的照度,镜头将被测场景中的目标成像到视觉传感器(CCD)的靶面上,将其转变为电信号,图像采集卡将电信号转变为数字图像信息。
即把每一点的亮度转变为灰度级数据,并存储为一幅或多幅图像;计算机实现图像存储、处理,并给出测量结果和输出控制信号。

一、镜头技术
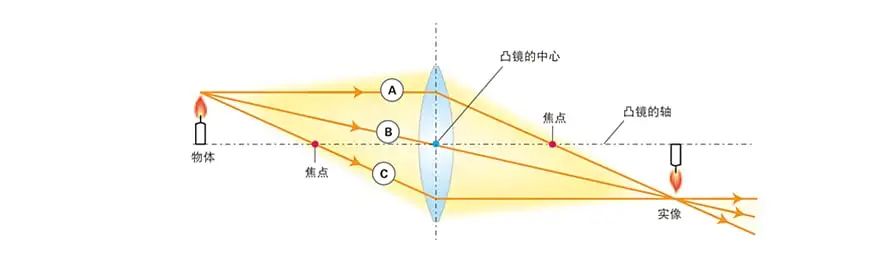
镜头是集聚光线,使成像单元能获得清晰影像的结构。
光学镜头目前有监控级和工业级两种,监控级镜头主要适用于图像质量不高、价格较低的应用场合;工业级镜头由于图像质量好、畸变小、价格高,主要应用于工业零件检测和科学研究等应用场合。
视场角和焦距是光学镜头最重要的技术参数,滤光镜的使用也是镜头技术的重要组成部分。

1.光圈(Aperture)
一般用口径系数f表示,指镜头口径与焦距之比,f/2.8即指1:2.8。
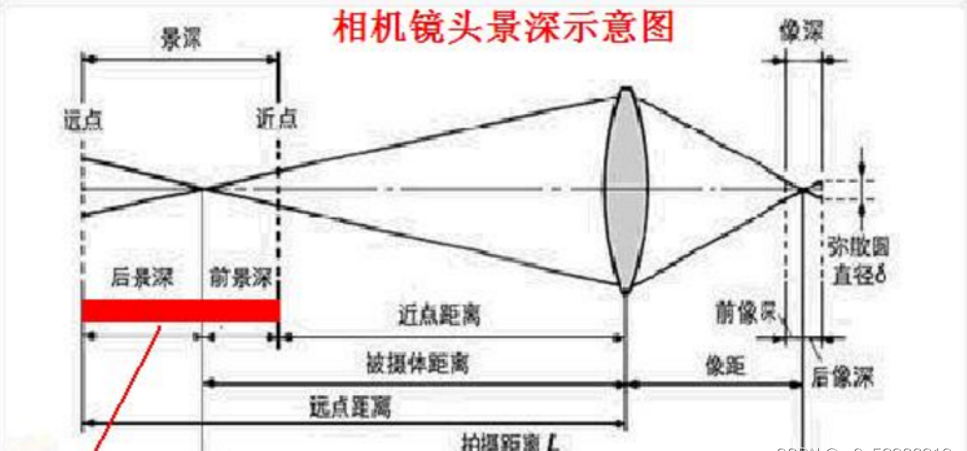
2.景深(Depth of Field)
在焦点前后各有一个容许弥散圆,这两个弥散圆之间的距离就叫景深,即:在被摄主体(对焦点)前后,其影像仍然有一段清晰范围的,就是景深。
3.分辨力
指能分清楚物体的能力,单位LP/mm(Line pairs/Milimeter) 。
4.数值孔径(Numerical Aperture)
5.调制传递函数(Modulation Transfer Function)
MTF好的镜头有利于低对比度景物的再现,拍出的图像层次丰富、细节明显、质感细腻。
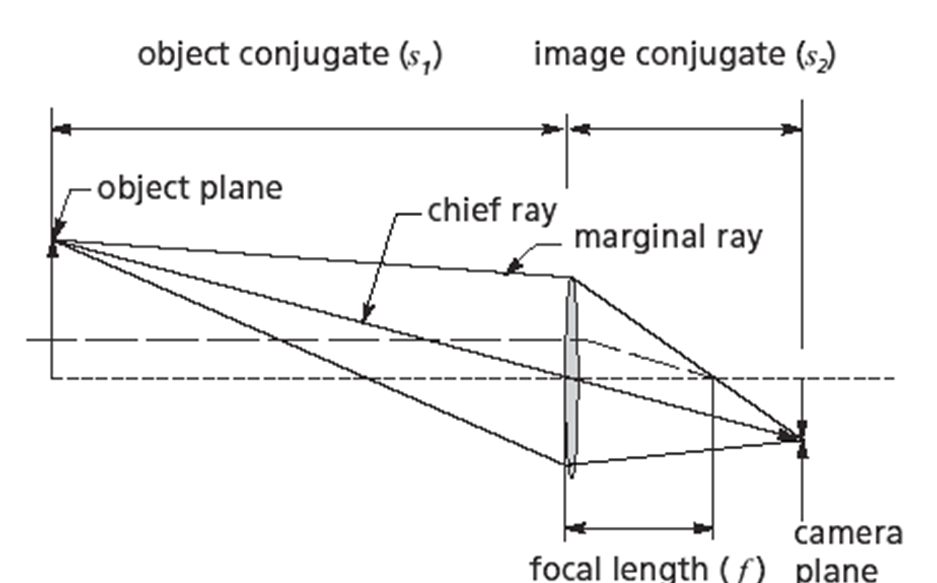
6.视场角
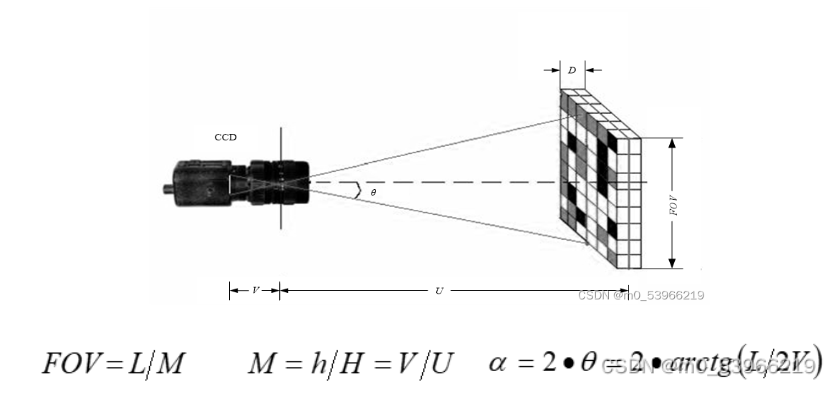
7.焦距
镜头焦距的长短决定着视场角的大小,焦距越短,视场角就越大,观察范围也越大,但远物体不清楚;
焦距越长,视场角就越小,观察范围也越小,很远的物体也能看清楚,短焦距的光学系统比长焦距的光学系统有更佳聚集光的能力。
自动调焦相机的调焦利用电子测距器自动进行,当采集图片时,根据被摄目标的距离,电子测距器可以把前后移动的镜头控制在相应的位置上,或旋转镜头至需要位置,使被摄目标成像达到最清晰。
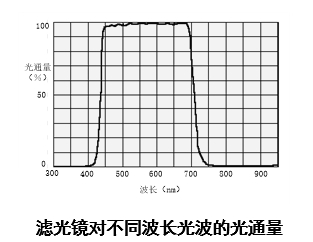
8.滤光镜
能按照规定的需要改变入射光的光谱强度分布或使其偏振状态发生变化。
二、摄像机技术
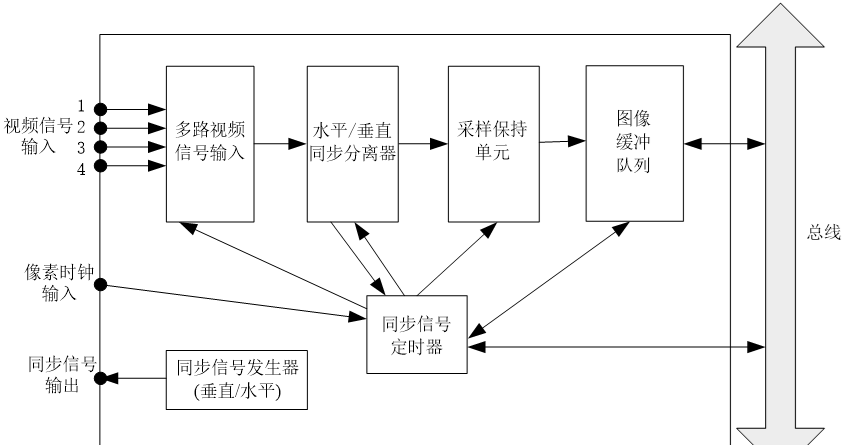
摄像机是获取图像的前端采集设备,它以面阵 CCD 或CMOS图像传感器为核心部件,外加同步信号产生电路、视频信号处理电路及电源等组合而成。
它是机器视觉系统中不可或缺的重要组成部分。
摄像机采集图像质量的好坏直接影响后期图像处理的速度与效果。所以选取一个各项指标符合要求的摄像机至关重要。
1.图像传感器
CCD摄像机:(Charge Coupled Device,电荷耦合器件):感光像元在接收输入光后,产生电荷转移,形成输出电压。
分为线阵和面阵两种。性价比高,受到广泛应用。
CMOS摄像机:(Complementary Metal Oxide Semiconductor,互补金属氧化物半导体):体积小、耗电少、价格低,在光学分辨率、感光度、信噪比和高速成像等已超过CCD。
2.传感器
机器视觉领域的相机分辨率就是其能够拍摄最大图片的面积,通常以像素为单位,分辨率越大,图片的面积越大,文件(容量)也越大。
通常分辨率表示成每一个方向上的像素数量,比如640×480,那它的分辨率就达到了307200像素,也就是常说的30万像素。
3.帧速
帧速指视频画面每秒钟传播的帧数,用于衡量视频信号传输的速度,单位为帧/秒(fps)。
动态画面实际上是由一帧帧静止画面连续播放而成的,机器视觉系统必须快速采集这些画面并将其显示在屏幕上才能获得连续运动的效果。
采集处理时间越长,帧速就越低,如果帧速过低的话画面就会产生停顿、跳跃的现象。一般对于机器视觉系统来说,每秒60帧较为理想。
4.智能相机
智能相机(Smart Camera)是一种高度集成化的微小型机器视觉系统。
它将图像的采集、处理与通信功能集成于单一相机内,从而提供了具有多功能、模块化、高可靠性、易于实现的机器视觉系统。
同时,由于应用了最新的DSP/GPU、FPGA及大容量存储技术,其智能化程度不断提高,可满足多种机器视觉的应用需求。
5.相机接口
•CameraLink 接口:专为机器视觉的高端应用设计,高速度,高分辨率,抗噪性好。
•IEEE 1394(FireWire)接口:即插即用串行接口,可同时支持63个像机,每个相距4.5米,最远可达72米。支持800Mbits/s甚至3200Mbits/s的传输速度。
•USB 接口:是一种应用非常普遍的串型接口 。传输速率可达480Mbits/s,可供多达127个设备同时使用。
•Gigabit Ethernet 接口:基于网络连接协议Ethernet,即插即用 ,数据连续高速传输。
6.光源技术
光源是机器视觉系统中的关键组成部分,在机器视觉系统中十分重要。
光源的主要功能是以合适的方式将光线投射到待测物体上,突出待测特征部分对比度。好的光源能够改善整个系统的分辨率,减轻后续图像处理的压力。
对于不同的检测对象,必须采用不同的照明方式才能突出被测对象的特征,有时可能需要采取几种方式的结合,而最佳的照明方法和光源的选择往往需要大量的试验才能找到。
常见分类为前光源、背光源、环形光源、点光源、可调光源。
(1)环形光源

环形光源的特点如下。
•可将不同照射角度、不同颜色的光源组合,从而突出物体的三维信息。
•采用高密度LED阵列设计,亮度较高。
•多种紧凑设计,可节省安装空间。
•可解决对角照射的阴影问题。
•可选用漫射板导光,光线均匀扩散。
环形光源可应用于PCB基板检测、芯片检测、显微镜照明、液晶校正、塑胶容器检测、集成电路的印字检查等场景中。
(2)背光源

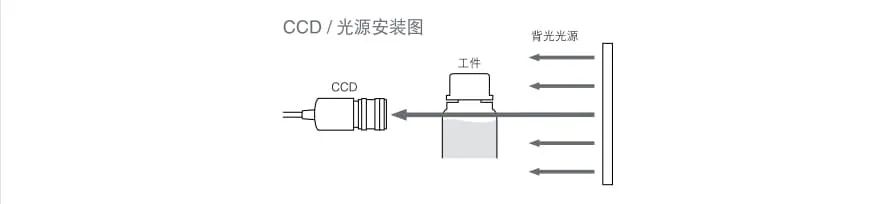
采用高密度LED阵列设计,可提供高强度的背光照明,并突出物体的外形轮廓特征,尤其适合作为显微镜的载物台。
背光源分为多种,如红白两用背光源、红蓝两用背光源等。通过调配出不同的颜色,可满足不同被测物的多色要求。
可应用在机械零件尺寸的测量、电子元件的检测、芯片的外形检测、胶片污点的检测、透明物体的划痕检测等场景中。
(3)条形光源

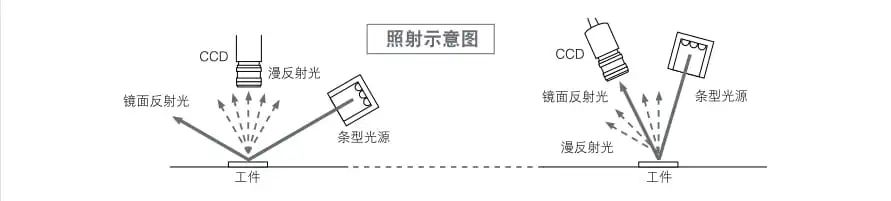
条形光源是较大被测物的首选光源,颜色可根据需求搭配、自由组合,照射角度可调。
可应用于金属表面检查、图像扫描、表面裂缝检测、液晶显示器面板检测等场景中。
(4)同轴光源

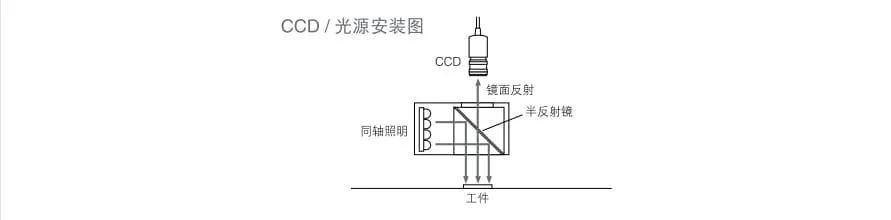
同轴光源可以消除因物体表面不平整而引起的阴影,从而减少干扰。其特点如下
•采用分光镜设计,可减少光损失、提高成像的清晰度。
•可均匀照射物体表面。
•同轴光源可应用于反射度极高的物体表面划伤检测(如金属、玻璃、胶片、晶片等)芯片和硅晶片的破损检测、Mark 点定位、条码识别等场景中。
(5)点光源

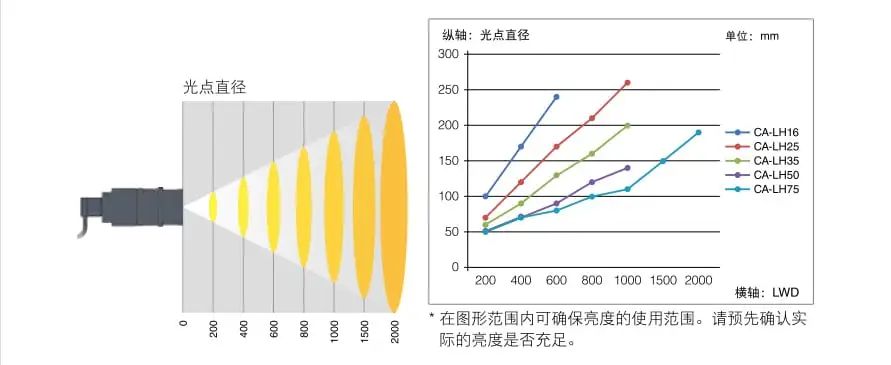
点光源的特点如下
•功率大、体积小、发光强度高。
•作为卤素灯的替代品,非常适合作为镜头的同轴光源。
•具有高效散热装置,大大提高了光源的使用寿命。
•点光源可应用于芯片检测、Mark 点定位、晶片及液晶玻璃的基底校正等场景中。
(6)碗状光源(球积分光源)

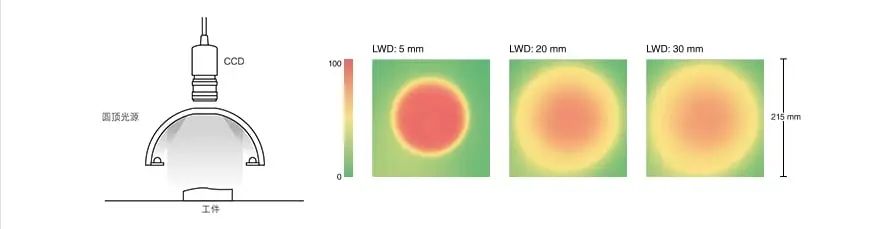
碗状光源可均匀反射从底部发出的光线,从而使整个图像的亮度均匀。
可应用于曲面表面的检测、凹凸表面的检测、弧形表面的检测,以及金属、玻璃等表面反光较强的物体表面检测场景中。
三、图像采集卡(Image Capture Card)
又称图像捕捉卡,是一种可以获取数字化视频图像信息,并将其存储和播放出来的硬件设备。
很多图像采集卡能在捕捉视频信息的同时获得伴音,使音频部分和视频部分在数字化时同步保存、同步播放。
版权声明:本文为CSDN博主「liutangplease」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:
https://blog.csdn.net/m0_53966219/article/details/127460437
声明:部分内容来源于网络,仅供读者学习、交流之目的。文章版权归原作者所有。如有不妥,请联系删除。
下载1:OpenCV-Contrib扩展模块中文版教程
在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。
下载2:Python视觉实战项目52讲
在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。
下载3:OpenCV实战项目20讲
在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~














 2785
2785

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









