







 超级会员免费看
超级会员免费看
 本文介绍了二维泊松方程的有限差分法求解,详细阐述了如何将偏微分方程转化为矩阵问题,并通过Matlab程序实现求解过程。内容包括差分格式的建立、矩阵形式的表示,以及具体示例的求解步骤,展示了数值解与解析解的误差比较。
本文介绍了二维泊松方程的有限差分法求解,详细阐述了如何将偏微分方程转化为矩阵问题,并通过Matlab程序实现求解过程。内容包括差分格式的建立、矩阵形式的表示,以及具体示例的求解步骤,展示了数值解与解析解的误差比较。
2.2 偏微分方程的差分解法
2.2.1 二维泊松方程
考虑区域 Ω \Omega Ω 上的二维泊松问题:
{
−
(
∂
2
∂
x
2
+
∂
2
∂
y
2
)
u
=
f
(
x
,
y
)
,
(
x
,
y
)
∈
Ω
u
∣
∂
Ω
=
φ
(
x
,
y
)
,
(2-16)
\left\{\begin{array}{l} -\left(\frac{\partial^2}{\partial x^2}+\frac{\partial^2}{\partial y^2}\right) u=f(x, y), \quad(x, y) \in \Omega \\ \left.u\right|_{\partial \Omega}=\varphi(x, y), \end{array}\right.\tag{2-16}
{−(∂x2∂2+∂y2∂2)u=f(x,y),(x,y)∈Ωu∣∂Ω=φ(x,y),(2-16)
其中,
∂
Ω
\partial \Omega
∂Ω 为区域
Ω
\Omega
Ω 的边界,
f
(
x
,
y
)
f(x, y)
f(x,y) 和
φ
(
x
,
y
)
\varphi(x, y)
φ(x,y) 为已知函数。
u
∣
∂
Ω
=
φ
(
x
,
y
)
u\mid_{\partial \Omega}=\varphi(x, y)
u∣∂Ω=φ(x,y) 描述了函数
u
u
u 在 边界上的取值, 即所谓的边界条件。为简单起见, 这里仅讨论
Ω
\Omega
Ω 为矩形的情况, 即
a
<
x
<
b
a<x<b
a<x<b,
c
<
y
<
d
c<y<d
c<y<d 。首先, 用间隔
h
1
=
(
b
−
a
)
/
N
、
h
2
=
(
d
−
c
)
/
M
h_1=(b-a) / N 、 h_2=(d-c) / M
h1=(b−a)/N、h2=(d−c)/M 分别将
x
x
x 轴上的区间
[
a
,
b
]
、
y
[a, b] 、 y
[a,b]、y 轴上的区间
[
c
,
d
]
[c, d]
[c,d] 划分为
N
、
M
N 、 M
N、M 等分, 得
x
i
=
a
+
i
h
1
、
0
⩽
i
⩽
N
x_i=a+i h_1 、 0 \leqslant i \leqslant N
xi=a+ih1、0⩽i⩽N 和
y
j
=
c
+
j
h
2
、
0
⩽
j
⩽
M
y_j=c+j h_2 、 0 \leqslant j \leqslant M
yj=c+jh2、0⩽j⩽M 。再根据
x
i
x_i
xi 和
y
j
y_j
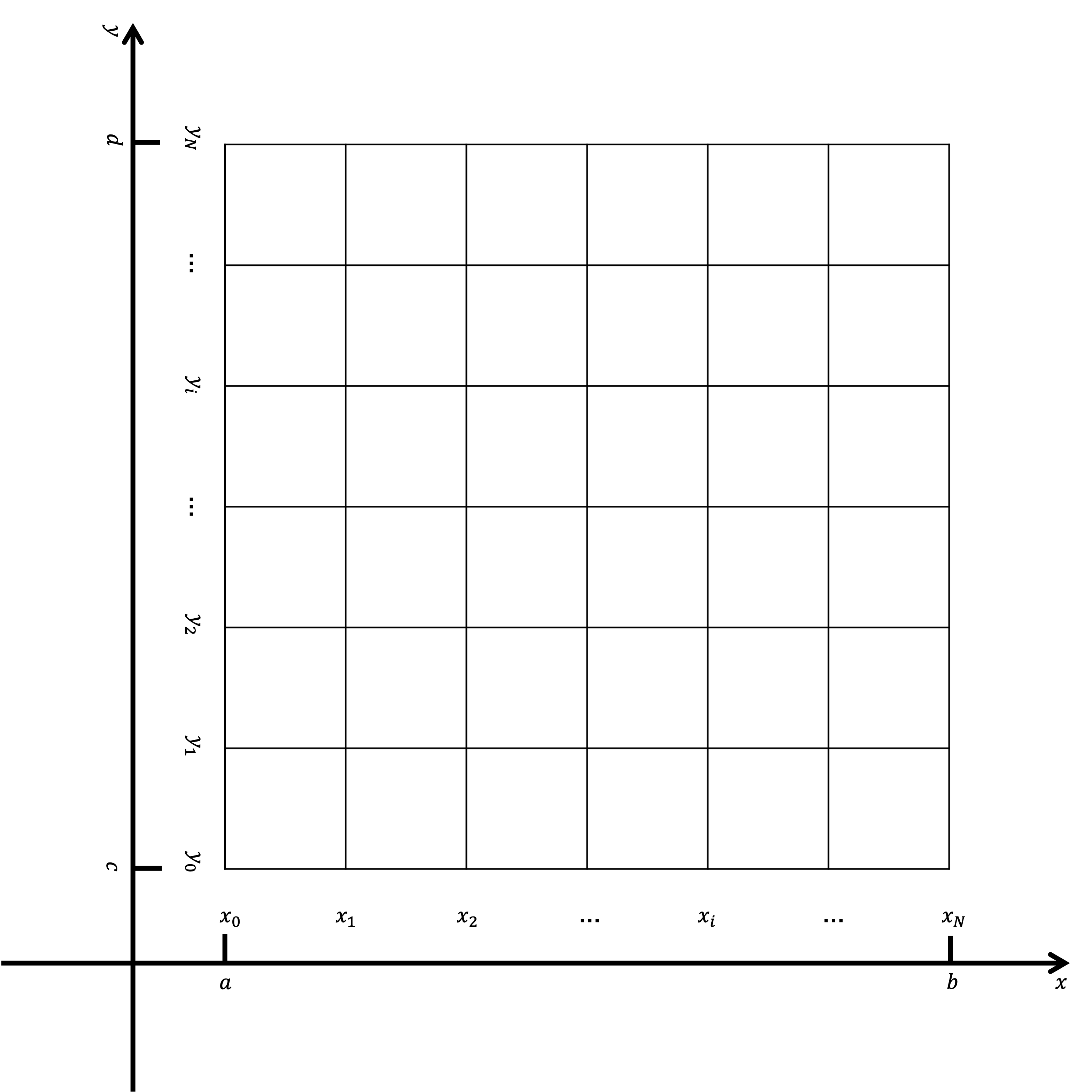
yj 对矩形 区域进行网格剖分, 如下图所示。横线与坚线的交点就是网格结点, 称位于边界
∂
Ω
\partial \Omega
∂Ω 上的 结点为边界结点, 其余结点为内结点。
在内结点处考虑泊松问题:
−
[
∂
2
u
(
x
i
,
y
j
)
∂
x
2
+
∂
2
u
(
x
i
,
y
j
)
∂
y
2
]
=
f
(
x
i
,
y
j
)
,
1
⩽
i
⩽
N
−
1
,
1
⩽
j
⩽
M
−
1
(2-17)
-\left[\frac{\partial^2 u\left(x_i, y_j\right)}{\partial x^2}+\frac{\partial^2 u\left(x_i, y_j\right)}{\partial y^2}\right]=f\left(x_i, y_j\right), \quad 1 \leqslant i \leqslant N-1, \quad 1 \leqslant j \leqslant M-1\tag{2-17}
−[∂x2∂2u(xi,yj)+∂y2∂2u(xi,yj)]=f(xi,yj),1⩽i⩽N−1,1⩽j⩽M−1(2-17)
由泰勒公式, 有:
∂
2
u
(
x
i
,
y
j
)
∂
x
2
=
1
h
1
2
[
u
(
x
i
−
1
,
y
j
)
−
2
u
(
x
i
,
y
j
)
+
u
(
x
i
+
1
,
y
j
)
]
−
h
1
2
12
∂
4
u
(
ξ
i
j
,
y
j
)
∂
x
4
,
x
i
−
1
<
ξ
i
j
<
x
i
+
1
(2-18)
\begin{gathered} \frac{\partial^2 u\left(x_i, y_j\right)}{\partial x^2}=\frac{1}{h_1^2}\left[u\left(x_{i-1}, y_j\right)-2 u\left(x_i, y_j\right)+u\left(x_{i+1}, y_j\right)\right]-\frac{h_1^2}{12} \frac{\partial^4 u\left(\xi_{i j}, y_j\right)}{\partial x^4}, \\ x_{i-1}<\xi_{i j}<x_{i+1} \end{gathered}\tag{2-18}
∂x2∂2u(xi,yj)=h121[u(xi−1,yj)−2u(xi,yj)+u(xi+1,yj)]−12h12∂x4∂4u(ξij,yj),xi−1<ξij<xi+1(2-18)
∂
2
u
(
x
i
,
y
j
)
∂
y
2
=
1
h
2
2
[
u
(
x
i
,
y
j
−
1
)
−
2
u
(
x
i
,
y
j
)
+
u
(
x
i
,
y
j
+
1
)
]
−
h
2
2
12
∂
4
u
(
x
i
,
η
i
j
)
∂
y
4
,
y
j
−
1
<
η
i
j
<
y
j
+
1
(2-19)
\begin{gathered} \frac{\partial^2 u\left(x_i, y_j\right)}{\partial y^2}=\frac{1}{h_2^2}\left[u\left(x_i, y_{j-1}\right)-2 u\left(x_i, y_j\right)+u\left(x_i, y_{j+1}\right)\right]-\frac{h_2^2}{12} \frac{\partial^4 u\left(x_i, \eta_{i j}\right)}{\partial y^4}, \\ y_{j-1}<\eta_{i j}<y_{j+1} \end{gathered}\tag{2-19}
∂y2∂2u(xi,yj)=h221[u(xi,yj−1)−2u(xi,yj)+u(xi,yj+1)]−12h22∂y4∂4u(xi,ηij),yj−1<ηij<yj+1(2-19)
将以上两式代入式
(
2
−
17
)
(2-17)
(2−17), 忽略小量
O
(
h
1
2
+
h
2
2
)
O\left(h_1{ }^2+h_2{ }^2\right)
O(h12+h22), 并使用简写
u
i
j
=
u
(
x
i
,
y
j
)
u_{i j}=u\left(x_i, y_j\right)
uij=u(xi,yj), 得到差分 格式 (2-20)。所谓差分格式, 就是用几个相邻数值点的差商来替代方程中的导数或偏导数 的近似算法。
−
1
h
2
2
u
i
,
j
−
1
−
1
h
1
2
u
i
−
1
,
j
+
2
(
1
h
1
2
+
1
h
2
2
)
u
i
,
j
−
1
h
1
2
u
i
+
1
,
j
−
1
h
2
2
u
i
,
j
+
1
=
f
(
x
i
,
y
j
)
,
1
⩽
i
⩽
N
−
1
,
1
⩽
j
⩽
M
−
1
(2-20)
\begin{gathered} -\frac{1}{h_2^2} u_{i, j-1}-\frac{1}{h_1^2} u_{i-1, j}+2\left(\frac{1}{h_1^2}+\frac{1}{h_2^2}\right) u_{i, j}-\frac{1}{h_1^2} u_{i+1, j}-\frac{1}{h_2^2} u_{i, j+1}=f\left(x_i, y_j\right), \\ 1 \leqslant i \leqslant N-1, \quad 1 \leqslant j \leqslant M-1 \end{gathered}\tag{2-20}
−h221ui,j−1−h121ui−1,j+2(h121+h221)ui,j−h121ui+1,j−h221ui,j+1=f(xi,yj),1⩽i⩽N−1,1⩽j⩽M−1(2-20)
先定义向量
u
j
:
\boldsymbol{u}_j:
uj:
u
j
=
(
u
1
j
,
u
2
j
,
…
,
u
N
−
1
,
j
)
T
,
0
⩽
j
⩽
M
(2-21)
\boldsymbol{u}_j=\left(u_{1 j}, \quad u_{2 j}, \quad \ldots, \quad u_{N-1, j}\right)^{\mathrm{T}}, \quad 0 \leqslant j \leqslant M\tag{2-21}
uj=(u1j,u2j,…,uN−1,j)T,0⩽j⩽M(2-21)
再将差分格式 (2-20) 写为矩阵形式:
D
u
j
−
1
+
C
u
j
+
D
u
j
+
1
=
f
j
,
1
⩽
j
⩽
M
−
1
(2-22)
\boldsymbol{D} \boldsymbol{u}_{j-1}+\boldsymbol{C} \boldsymbol{u}_j+\boldsymbol{D} \boldsymbol{u}_{j+1}=\boldsymbol{f}_j, \quad 1 \leqslant j \leqslant M-1\tag{2-22}
Duj−1+Cuj+Duj+1=fj,1⩽j⩽M−1(2-22)
其中, 矩阵
C
、
D
、
\boldsymbol{C} 、 \boldsymbol{D} 、
C、D、 向量
f
j
\boldsymbol{f}_j
fj 的定义如下, 注意向量
f
j
\boldsymbol{f}_j
fj 的首尾元素已包含了
x
=
a
x=a
x=a 和
x
=
b
x=b
x=b 处的边界条件。
C
=
(
2
(
1
h
1
2
+
1
h
2
2
)
−
1
h
1
2
−
1
h
1
2
2
(
1
h
1
2
+
1
h
2
2
)
−
1
h
1
2
⋱
⋱
⋱
−
1
h
1
2
2
(
1
h
1
2
+
1
h
2
2
)
−
1
h
1
2
−
1
h
1
2
2
(
1
h
1
2
+
1
h
2
2
)
)
(2-23)
\boldsymbol{C}=\left(\begin{array}{ccccc} 2\left(\frac{1}{h_1^2}+\frac{1}{h_2^2}\right) &-\frac{1}{h_1^2} & & & \\ -\frac{1}{h_1^2} & 2\left(\frac{1}{h_1^2}+\frac{1}{h_2^2}\right) & -\frac{1}{h_1^2} & & \\ & \ddots & \ddots & \ddots & \\ & & -\frac{1}{h_1^2} & 2\left(\frac{1}{h_1^2}+\frac{1}{h_2^2}\right) & -\frac{1}{h_1^2} \\ & & & -\frac{1}{h_1^2} & 2\left(\frac{1}{h_1^2}+\frac{1}{h_2^2}\right) \end{array}\right)\tag{2-23}
C=
2(h121+h221)−h121−h1212(h121+h221)⋱−h121⋱−h121⋱2(h121+h221)−h121−h1212(h121+h221)
(2-23)
D
=
(
−
1
h
2
2
−
1
h
2
2
⋱
−
1
h
2
2
−
1
h
2
2
)
,
f
j
=
(
f
(
x
1
,
y
j
)
+
1
h
1
2
φ
(
x
0
,
y
j
)
f
(
x
2
,
y
j
)
⋮
f
(
x
N
−
2
,
y
j
)
f
(
x
N
−
1
,
y
j
)
+
1
h
1
2
φ
(
x
N
,
y
j
)
)
(2-24)
\boldsymbol{D}=\left(\begin{array}{cccc} -\frac{1}{h_2^2} & & & \\ & -\frac{1}{h_2^2} & & \\ & & \ddots & \\ & & -\frac{1}{h_2^2} & \\ & & & -\frac{1}{h_2^2} \end{array}\right), \boldsymbol{f}_j=\left(\begin{array}{c} f\left(x_1, y_j\right)+\frac{1}{h_1^2} \varphi\left(x_0, y_j\right) \\ f\left(x_2, y_j\right) \\ \vdots \\ f\left(x_{N-2}, y_j\right) \\ f\left(x_{N-1}, y_j\right)+\frac{1}{h_1^2} \varphi\left(x_N, y_j\right) \end{array}\right)\tag{2-24}
D=
−h221−h221⋱−h221−h221
,fj=
f(x1,yj)+h121φ(x0,yj)f(x2,yj)⋮f(xN−2,yj)f(xN−1,yj)+h121φ(xN,yj)
(2-24)
式 (2-22) 还可以进一步写成如下的矩阵形式, 注意等号右边向量的首尾元素加入了
y
=
c
y=c
y=c 和
y
=
d
y=d
y=d 处的边界条件。
(
C
D
D
C
D
⋱
⋱
⋱
D
C
D
D
C
)
(
u
1
u
2
⋮
u
M
−
2
u
M
−
1
)
=
(
f
1
−
D
u
0
f
2
⋮
f
M
−
2
f
M
−
1
−
D
u
M
)
(2-25)
\left(\begin{array}{ccccc} C & D & & & \\ D & C & D & & \\ & \ddots & \ddots & \ddots & \\ & & D & C & D \\ & & & D & C \end{array}\right)\left(\begin{array}{c} \boldsymbol{u}_1 \\ \boldsymbol{u}_2 \\ \vdots \\ \boldsymbol{u}_{M-2} \\ \boldsymbol{u}_{M-1} \end{array}\right)=\left(\begin{array}{c} \boldsymbol{f}_1-\boldsymbol{D} \boldsymbol{u}_0 \\ \boldsymbol{f}_2 \\ \vdots \\ \boldsymbol{f}_{M-2} \\ \boldsymbol{f}_{M-1}-\boldsymbol{D} \boldsymbol{u}_M \end{array}\right)\tag{2-25}
CDDC⋱D⋱D⋱CDDC
u1u2⋮uM−2uM−1
=
f1−Du0f2⋮fM−2fM−1−DuM
(2-25)
因此, 矩形
Ω
\Omega
Ω 上的二维泊松问题就转化为上面形如
A
u
=
f
\boldsymbol{A} \boldsymbol{u}=\boldsymbol{f}
Au=f 的矩阵问题。对于这类问题, 最直接的解法就是先求
A
\boldsymbol{A}
A 的逆矩阵
A
−
1
\boldsymbol{A}^{-1}
A−1, 然后
u
=
A
−
1
f
\boldsymbol{u}=\boldsymbol{A}^{-1} \boldsymbol{f}
u=A−1f 即可, 这在 Matlab 中可用左除 \ 实现。注意式 (2-22)只针对内结点, 所以
C
、
D
\boldsymbol{C} 、 \boldsymbol{D}
C、D 均是
N
−
1
N-1
N−1 阶方阵,
A
\boldsymbol{A}
A 是
(
N
−
1
)
(
M
−
1
)
(N-1)(M-1)
(N−1)(M−1) 阶方 阵。下面给出一个实际例子。
{
−
(
∂
2
∂
x
2
+
∂
2
∂
y
2
)
u
=
(
π
2
−
1
)
e
x
sin
(
π
y
)
,
0
<
x
<
2
,
0
<
y
<
1
u
(
0
,
y
)
=
sin
(
π
y
)
,
u
(
2
,
y
)
=
e
2
sin
(
π
y
)
,
0
⩽
y
⩽
1
u
(
x
,
0
)
=
0
,
u
(
x
,
1
)
=
0
,
0
<
x
<
2
(2-26)
\left\{\begin{array}{lll} -\left(\frac{\partial^2}{\partial x^2}+\frac{\partial^2}{\partial y^2}\right) u=\left(\pi^2-1\right) \mathrm{e}^x \sin (\pi y), & 0<x<2, & 0<y<1 \\ u(0, y)=\sin (\pi y), & u(2, y)=\mathrm{e}^2 \sin (\pi y), & 0 \leqslant y \leqslant 1 \\ u(x, 0)=0, & u(x, 1)=0, & 0<x<2 \end{array}\right.\tag{2-26}
⎩
⎨
⎧−(∂x2∂2+∂y2∂2)u=(π2−1)exsin(πy),u(0,y)=sin(πy),u(x,0)=0,0<x<2,u(2,y)=e2sin(πy),u(x,1)=0,0<y<10⩽y⩽10<x<2(2-26)
根据式 (2-25) 求解这个泊松问题, 代码如下:
主程序代码如下
clear; close all;
%生成网格上的坐标
h=0.1; x=[0:h:2]'; y=[0:h:1]';
N=length(x)-1; M=length(y)-1;
[X,Y]=meshgrid(x,y);
%解析解
u_analytical=exp(X).*sin(pi*Y);
X=X(2:M,2:N); Y=Y(2:M,2:N);
%生成f(x,y)的矩阵
f=(pi^2-1)*exp(X).*sin(pi*Y);
f(:,1)=f(:,1)+sin(pi*y(2:M))/h^2;
f(:,end)=f(:,end)+exp(2)*sin(pi*y(2:M))/h^2;
%构造矩阵D、C、A
e=ones(N-1,1);
C=1/h^2*spdiags([-e 4*e -e],[-1 0 1],N-1,N-1);
D=-1/h^2*eye(N-1);
e=ones(M-1,1);
A=kron(eye(M-1),C)+kron(spdiags([e e],[-1 1],M-1,M-1),D);
%左除求解
f=f'; u=zeros(M+1,N+1);
u(2:M,2:N)=reshape(A\f(:),N-1,M-1)';
u(:,1)=sin(pi*y); u(:,end)=exp(2)*sin(pi*y);
%画图
figure(1), spy(A,5)
figure(2), subplot(2,2,1), mesh(x,y,u)
xlabel x, ylabel y, zlabel u
subplot(2,2,2), mesh(x,y,u-u_analytical)
axis([0 2 0 1 0 0.04])
xlabel x, ylabel y, zlabel Error
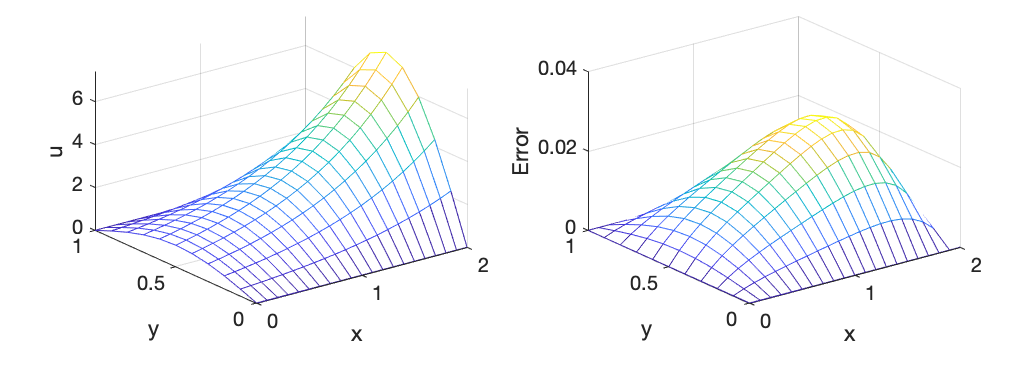
程序输出结果如图所示, 左图为
h
1
=
h
2
=
0.1
h_1=h_2=0.1
h1=h2=0.1 时泊松问题 (2-26) 的数值解, 右图为数值解与解析解
u
=
e
x
sin
(
π
y
)
u=\mathrm{e}^x \sin (\pi y)
u=exsin(πy) 之间的误差。当然, 进一步缩小
h
1
h_1
h1 和
h
2
h_2
h2 会以增加运算量为代价降低这个误差。
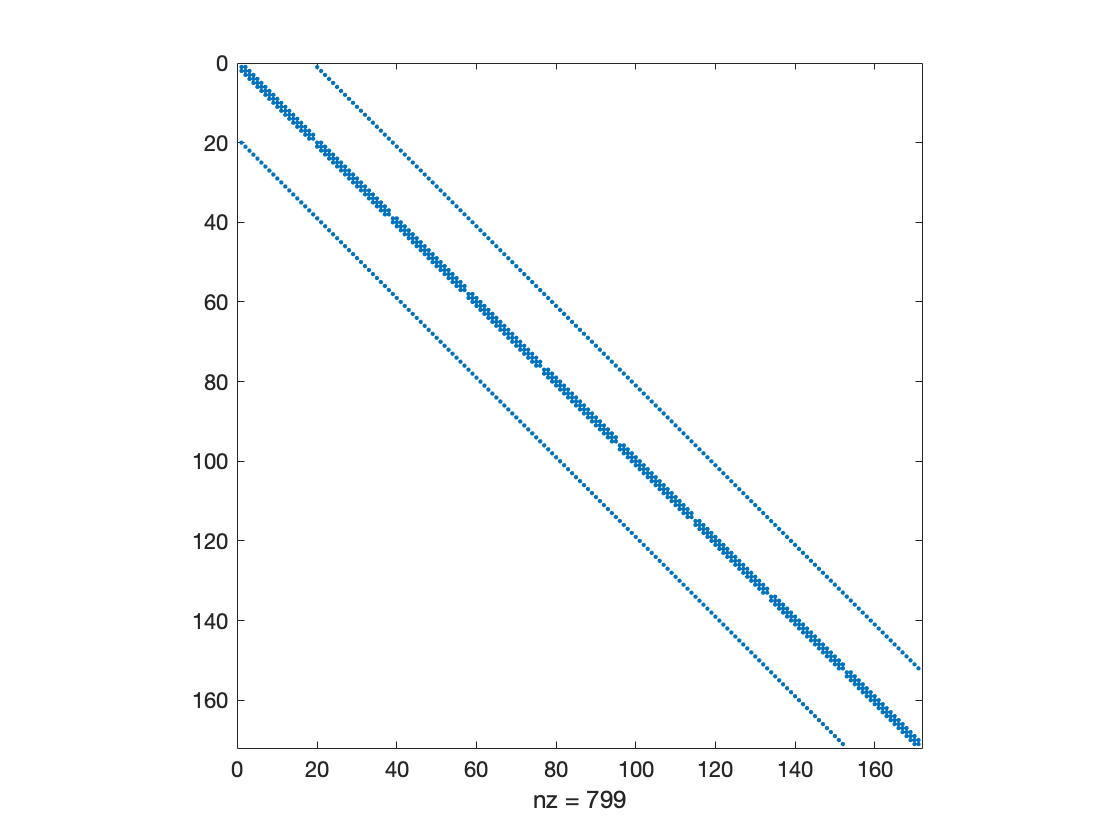
为了使读者产生直观的理解, 下图显示了
h
1
=
h
2
=
0.2
h_1=h_2=0.2
h1=h2=0.2 时方阵
A
\boldsymbol{A}
A 的非零元素分布情况。


















 1681
1681

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











