






一、线性方程组与向量
知识点一:线性方程组与矩阵
知识点二:numpy的解线性方程组接口
Code:np.linalg.solve(A,b)
二、向量空间、矩阵、行列式以及范数
知识点一:向量的运算法则
知识点二:向量的线性相关与线性无关
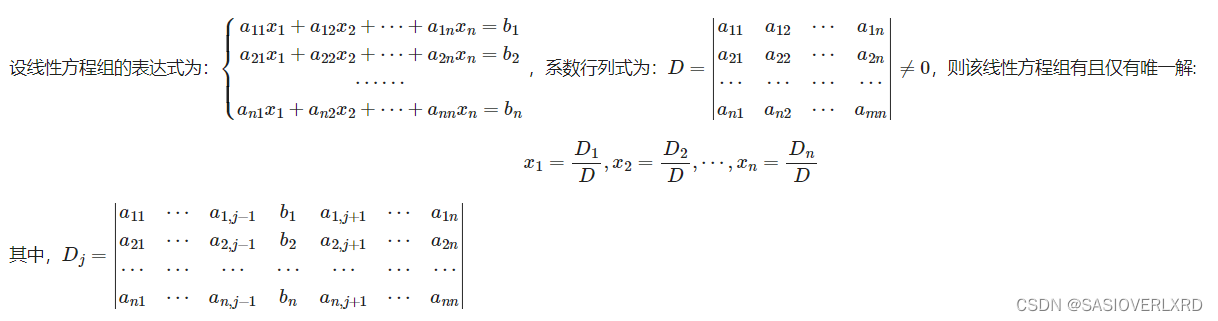
(1)判定方程组是否有解:
1.未知数个数等于方程的个数
2.系数行列式不等于0,则这个方程组是有唯一解的
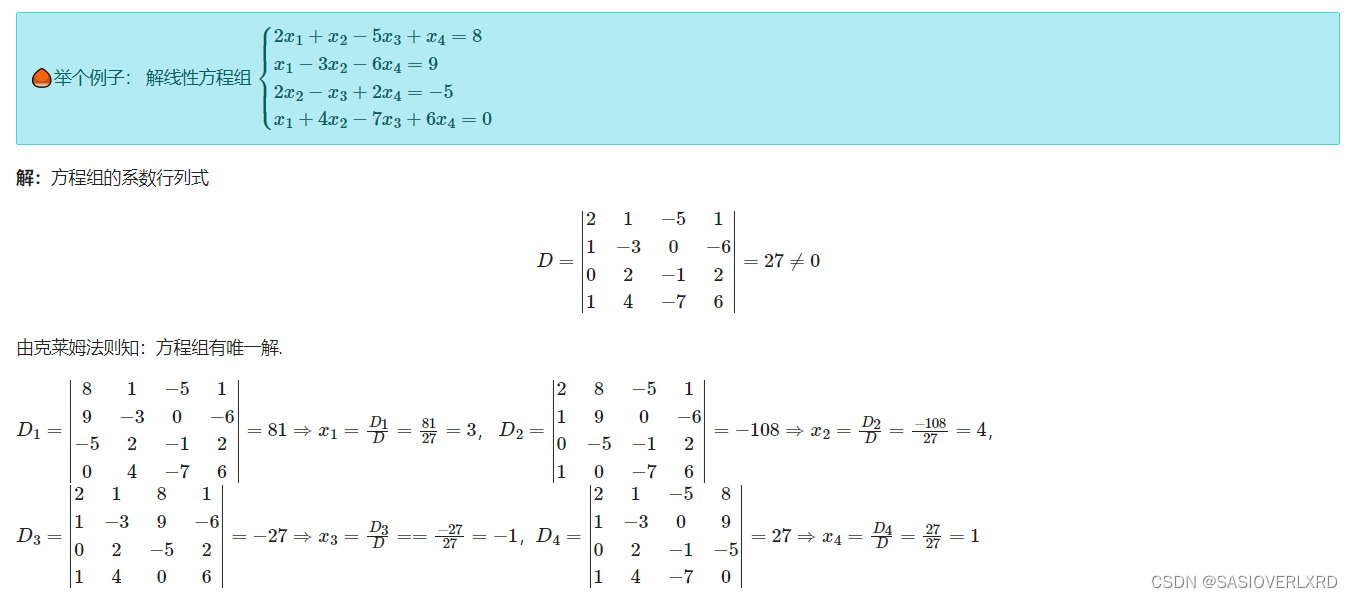
(2)克莱姆法则(Cramer’s Rule)
(3)行列式与方阵
求行列式的Code:np.linalg.det(A)(PS:一定要是方阵才能求行列式)
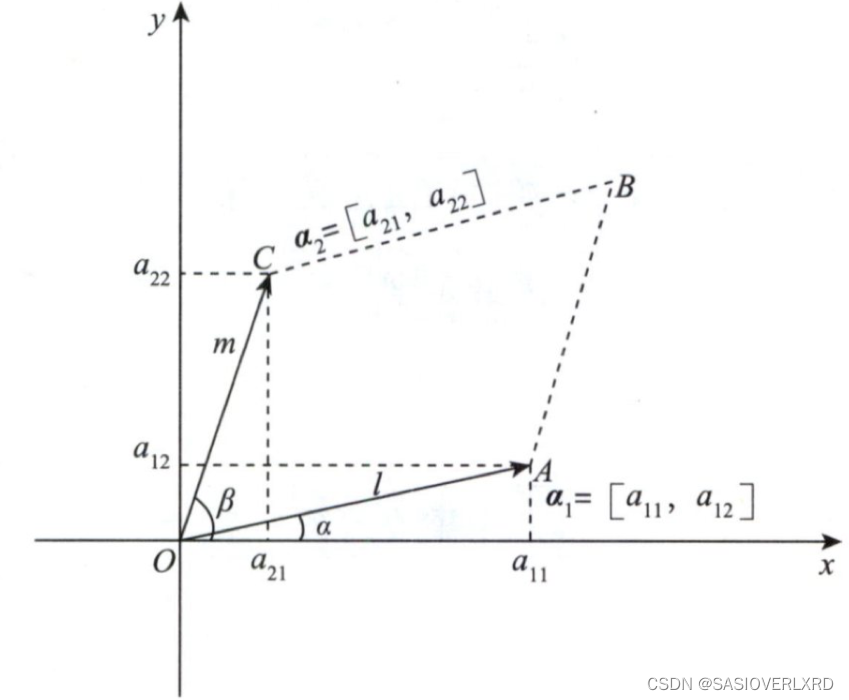
(4)行列式的几何意义
2阶行列式是由两个2维向量组成的,其(运算规则的)结果为以这两个向量为邻边的平行四边形的面积。
知识点三:矩阵
(1)不改变方程式解的三个操作
(2)矩阵的乘法
要求前一个矩阵的列数要等于后一个矩阵的行数
(3)单位矩阵
(4)初等矩阵
(5)左乘和右乘
要对行执行这种功能,就左乘一种“功能”;要对列执行这种功能,就右乘“功能”。
(6)非奇异矩阵
一、如果一个矩阵是可逆的,那么应该满足:
1.它一定要是个方阵,也就是行数等于列数。
2.它还要满足行列式不等于0。
二、矩阵求逆Code:np.linalg.inv
三、伪逆(广义逆)
(7)相似矩阵
重要概念1:向量在空间中的位置是绝对的,而其坐标值却是相对的,坐标的取值依托于其所选取的坐标向量(基底)。
Q1:那知道相似矩阵的概念有什么用呢?
Q2:一个矩阵代表着一个线性变换,而不同的坐标系又会得到不同的相似矩阵,那我们能不能选用一个最佳的坐标系,使得我们描述的这个线性变换的矩阵是最佳的呢?
Q3:什么矩阵才能称得上是最佳矩阵呢?
A:答案就是对角矩阵!因为当我们同时需要经历很多次线性变换的时候,对角矩阵能极大的减少我们的计算量。
求特征值和特征向量Code:lamb,p = np.linalg.eig(A)
重要概念2:特征向量就是那些经过矩阵A变换后的向量方向与变换前的方向相同或者相反的向量。(特征向量可以在某个矩阵的变换下保持在同一直线上,也就是没有发生角度的偏转)
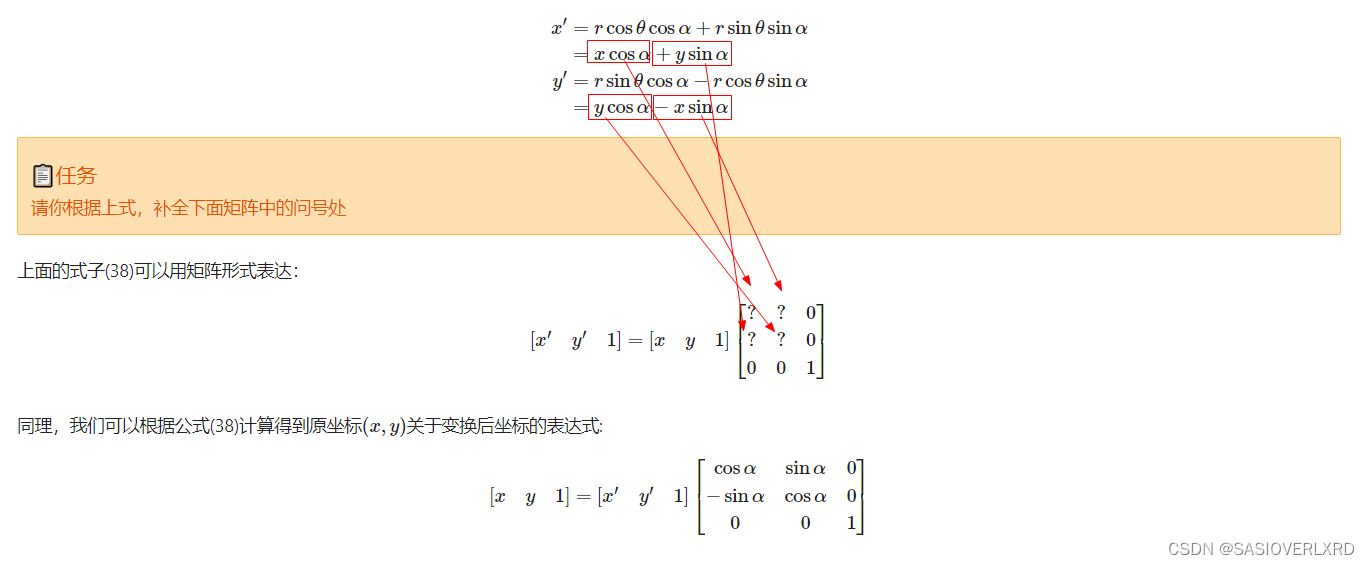
(8)正交矩阵
令一个向量进行旋转变换或者镜像变换的矩阵是正交矩阵。
性质1:正交矩阵的逆矩阵与转置矩阵相同。
性质2:A的各行是单位向量且两两正交(垂直),又或者说A的各列是单位向量且两两正交(垂直)。
施密特正交化(Gram-Schmidt):
(一)概念:给定一组基,把他变成标准正交基。
(二)原理:随便找一个原向量,把它固定住,接着找来第二个向量,往上面做投影,剩下的垂直分量就是第二个正交基,·····重复的做下去,直到所有基都变换过一遍后,得到的这组新的基就是正交基. 更进一步,如果我们把所有基进行标准化,使得每个基自己与自己做内积都为1,即模长为1,则得到的是一组标准正交基。 正交矩阵就为一个单位矩阵。


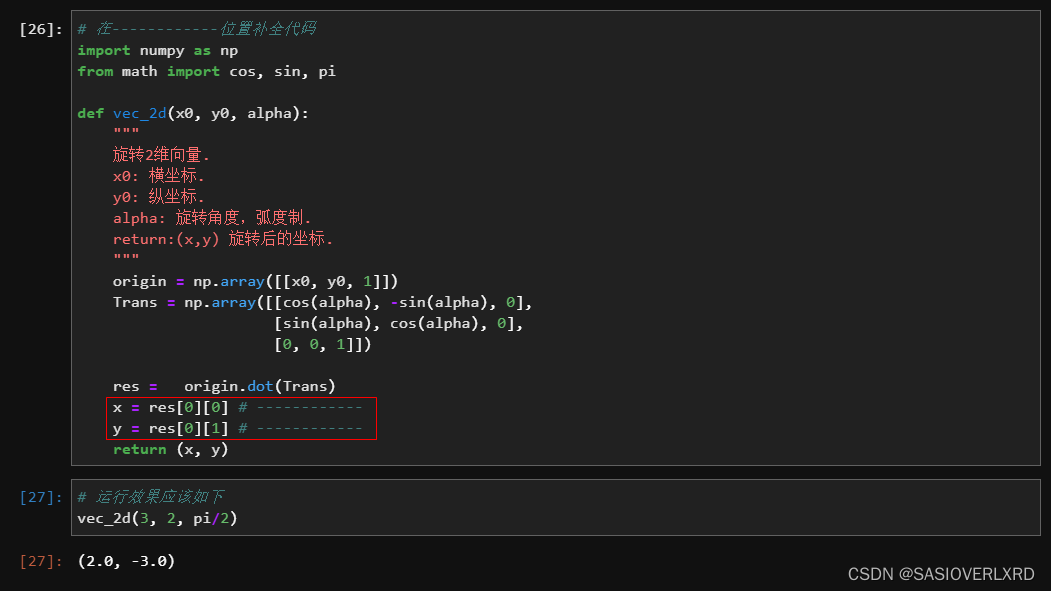
三、项目实战
(1)任务一
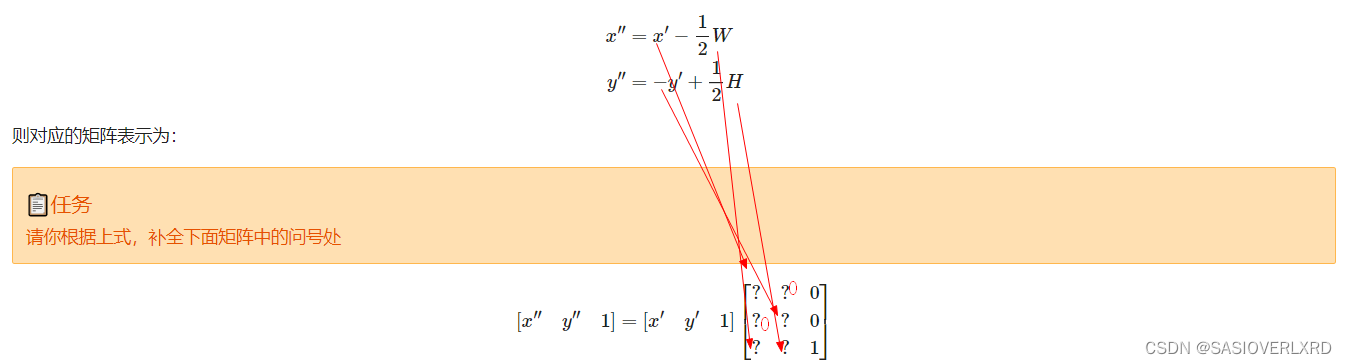
(2)任务二
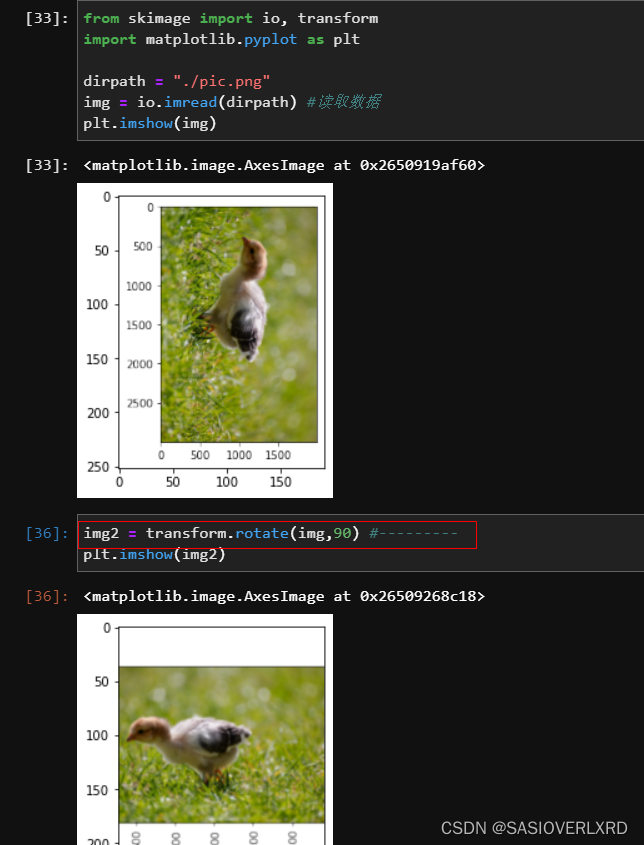
知识点一:skimage库
知识点二:内置函数
transform.rotate
(3)任务三















 350
350











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









