









前述:
QQ:961209458
V X:F9986858
承接毕业设计。
功能
设计内容:
1)温度控制、步进电机控制、定时控制三个控制部分;
2)时间、温度、步进电机转速显示;
3)录音模块。
设计要求:
1)定时喂食。能够根据不同宠物种类以及主人喂养宠物的方式习惯,自己定义时间为宠物提供食物;
2)定量喂食。通过步进电机的定时转速实现控制定量宠物粮食;
3)实时显示。OLED将检测的参数数据实时显示到屏幕上,显示时间、温度、步进电机转速转速;
4)语音提示。自定义录音,实现当到达定时喂食的时间时自动播放提示音宠物前来进食;
5)设置投喂量。设置控制步进电机转动时间,从而控制食物量多少。
本设计达到的目的:
能够自定义时间为宠物提供食物;
通过步进电机的定时转速实现控制定量宠物粮食;
OLED将检测的参数数据实时显示到屏幕上;
自定义录音提示音宠物前来进食;
设置步进电机控制食物量。
通过语音模块录制语音信息,再按键设定喂食时间,屏幕显示数据信息。
到达所设置的时间,语音模块自动播放语音吸引宠物前来进食,同时单片机控制电机驱动工作,控制定量食物。
演示视频
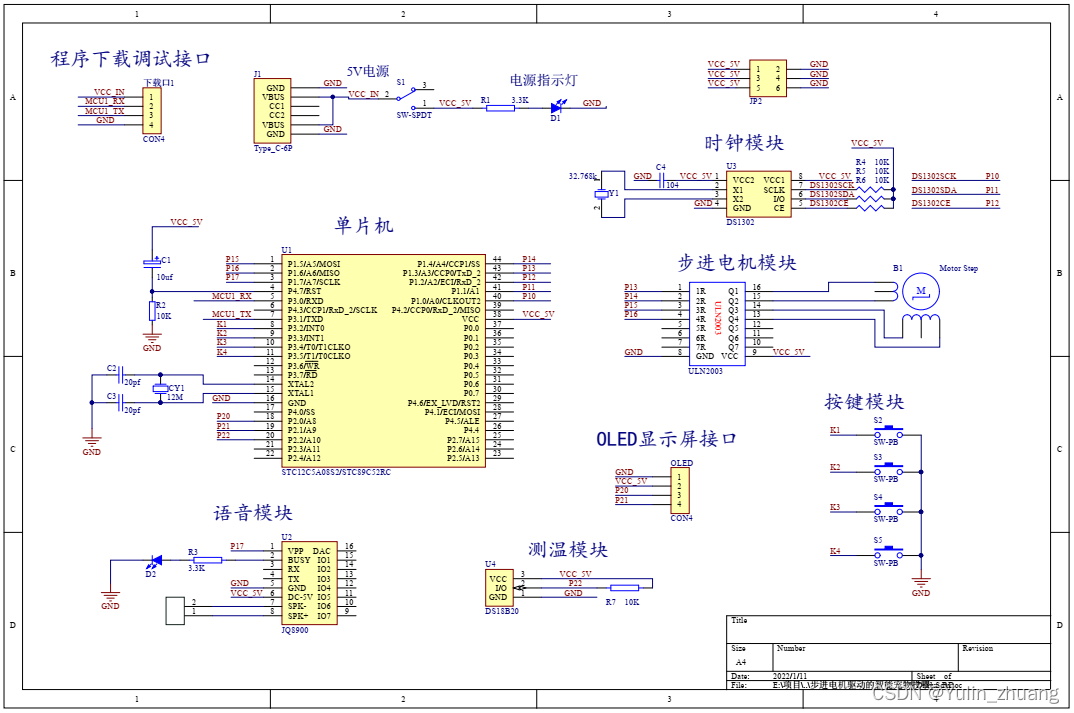
硬件电路
单片机代码
#include "REG51.h"
#include "oled.h"
#include "bmp.h"
#include "Ds18b20.h"
#include "DS1302.h"
#include "JQ8900.h"
#include "delay.h"
//按键位定义
sbit K1 = P3^2;
sbit K2 = P3^3;
sbit K3 = P3^4;
sbit K4 = P3^5;
//步进电机位定义
sbit IN1 = P1^3;
sbit IN2 = P1^4;
sbit IN3 = P1^5;
sbit IN4 = P1^6;
//喂食时分
char FeedHour = 12;
char FeedMinter = 1;
char speed = 7;//电机转速
int count50ms=200;//电机转动时间 默认不修改
char MP3 = 1;//播放音频编号 范围:1-7
bit FeedOnOff=1;//喂食开关 0:关 1:开 默认开
char FeedTimeChange = 0;//修改顺序 0:时 1:分 2:电机速度 3:音频播放
//ms延时函数
void Delay_xms(u16 x)
{
u16 i,j;
for(i=0;i<x;i++)
for(j=0;j<112;j++);
}
//顺时针转动
void MotorCW(void)
{
IN1 = 1;IN2 = 0;IN3 = 0;IN4 = 1;Delay_xms(speed);//转速调节
IN1 = 0;IN2 = 0;IN3 = 0;IN4 = 1;Delay_xms(speed);//转速调节
IN1 = 0;IN2 = 0;IN3 = 1;IN4 = 1;Delay_xms(speed);//转速调节
IN1 = 0;IN2 = 0;IN3 = 1;IN4 = 0;Delay_xms(speed);//转速调节
IN1 = 0;IN2 = 1;IN3 = 1;IN4 = 0;Delay_xms(speed);//转速调节
IN1 = 0;IN2 = 1;IN3 = 0;IN4 = 0;Delay_xms(speed);//转速调节
IN1 = 1;IN2 = 1;IN3 = 0;IN4 = 0;Delay_xms(speed);//转速调节
IN1 = 1;IN2 = 0;IN3 = 0;IN4 = 0;Delay_xms(speed);//转速调节
}
//设置定时器状态 state:0 定时器关 1:定时器开
void SetTimer0(unsigned char state)
{
TR0 = state;
ET0 = state;
EA = state;
}
//定时器初始化
void Timer0Init()
{
TMOD = 0X01;
TH0 = (65536-50000)/256;
TL0 = (65536-50000)%256;
SetTimer0(0);
}
//喂食控制
void FeedControl()
{
//计算当前时分
char NowHour,NowMinter;
NowHour=TIME[2]/16*10+TIME[2]&0x0f;
NowMinter=TIME[1]/16*10+TIME[1]&0x0f;
//显示时分
OLED_ShowNum(40,6,FeedHour,2,16);
OLED_ShowNum(64,6,FeedMinter,2,16);
//显示电机速度
OLED_ShowNum(100,6,8-speed,1,16);
//显示播放音频顺序
OLED_ShowNum(116,6,MP3,1,16);
if((NowHour==FeedHour)&&(NowMinter==FeedMinter)&&(count50ms==200)&&(FeedOnOff==1))
{
ONE_LINE_PLAY_SONG(MP3);//播放指定编号音频
SetTimer0(1);//开启定时器 电机转动时间计时
while(1)//步进电机转动
{
MotorCW();
if(count50ms<=0) //时间结束
{
SetTimer0(0);//关闭定时器,退出电机转动
break;
}
}
}
while((K2==0)||(K1==0))//喂食时间加减
{
if(K1==0)
{
if(FeedTimeChange==0)
{
if(++FeedHour>=23) FeedHour=23;//时最高到23
}
if(FeedTimeChange==1)
{
if(++FeedMinter>=59) FeedMinter=59;//分最高到59
}
if(FeedTimeChange==2)
{
if((speed--)<=1) speed=1;//速度最大为7
}
if(FeedTimeChange==3)
{
if(++MP3>=7) MP3=7;//音频编号最大为7
}
}
if(K2==0)
{
if(FeedTimeChange==0)
{
if((FeedHour--)<=0) FeedHour=0;//时最小为0
}
if(FeedTimeChange==1)
{
if((FeedMinter--)<=0) FeedMinter=0;//分最小为0
}
if(FeedTimeChange==2)
{
if(++speed>=7) speed=7;//速度最小为1
}
if(FeedTimeChange==3)
{
if((MP3--)<=1) MP3=1;//音频编号最小为1
}
}
delay_ms1(200);
}
if(K3==0)//修改喂食时间修改顺序
{
delay_ms1(10);
if(K3==0)
{
if(++FeedTimeChange>=4) FeedTimeChange=0;
}
while(K3==0);
}
if(K4==0)//修改喂食开关
{
delay_ms1(10);
if(K4==0)
{
FeedOnOff=~FeedOnOff;
}
delay_ms1(200);
}
//显示喂食开关状态
if(FeedOnOff==1)
{
OLED_ShowString(104,0,"ON ",16);
}
if(FeedOnOff==0)
{
OLED_ShowString(104,0,"OFF",16);
}
}
void Timer0Isr() interrupt 1
{
TH0 = (65536-50000)/256;
TL0 = (65536-50000)%256;
count50ms--;
}
int main(void)
{
OLED_Init(); //初始化OLED
OLED_Clear();
Timer0Init();
ONE_LINE_VOL(25);//设置音量25
OLED_ShowString(0,0,"Temp: . ",16);
OLED_ShowString(0,2,"Time: : :",16);
OLED_ShowString(0,4,"20 - - Wee:",16);
OLED_ShowString(0,6,"Feed: : ",16);
while(1)
{
FeedControl();//喂食控制
Ds1302ReadTime();//读取时间
GetTemp(Ds18b20ReadTemp());//读取温度
//显示温度
OLED_ShowNum(40,0,shi,1,16);
OLED_ShowNum(48,0,ge,1,16);
OLED_ShowNum(64,0,xs,1,16);
//显示时分秒
OLED_ShowNum(40,2,TIME[2]/16,1,16);
OLED_ShowNum(48,2,TIME[2]&0x0f,1,16);
OLED_ShowNum(64,2,TIME[1]/16,1,16);
OLED_ShowNum(72,2,TIME[1]&0x0f,1,16);
OLED_ShowNum(88,2,TIME[0]/16,1,16);
OLED_ShowNum(96,2,TIME[0]&0x0f,1,16);
//显示年月日周
OLED_ShowNum(16,4,TIME[6]/16,1,16);
OLED_ShowNum(24,4,TIME[6]&0x0f,1,16);
OLED_ShowNum(40,4,TIME[4]/16,1,16);
OLED_ShowNum(48,4,TIME[4]&0x0f,1,16);
OLED_ShowNum(64,4,TIME[3]/16,1,16);
OLED_ShowNum(72,4,TIME[3]&0x0f,1,16);
OLED_ShowNum(120,4,TIME[5]&0x0f,1,16);
}
}

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









