









课程成绩:95
代码链接:
目录
0. 说明
不同算法分别建立单独的.py文件 (例如MATD3_simple_spread.py、VDN_simple_spread.py、QMIX_simple_spread.py等) 编写实现,算法参数均在代码中体现。
每个算法的训练数据见result文件下相应的.log文件和.pkl文件,例如MATD3.log、MATD3.pkl。学习曲线在learning_curves/png目录下。
所有随机种子均已固定,在本机上可以复现。
所有代码已设置为测试模式,即载入训练的模型进行测试,所有路径为相对路径可以直接运行。
1. MATD3 for simple spread
1.1 gumbel-softmax重参数技巧
MADDPG是确定性策略梯度算法,输出的是确定性动作,针对离散型的动作(例如MPE环境),DDPG本应用 u θ ( s ) = a r g m a x a A ( s , a ) u_\theta(s)=\underset{a}{argmax}\;A(s,a) uθ(s)=aargmaxA(s,a)作为其确定性策略来输出一个确定性的离散动作,但 a r g m a x argmax argmax操作将使Actor网络的参数 θ \theta θ梯度中断,进而导致后续无法用梯度上升的方法由 Q ( s , u θ ( s ) ) Q(s, u_\theta(s)) Q(s,uθ(s))来更新Actor网络。
解决方法:使用gumbel-softmax代替argmax,通过调低温度系数
τ
\tau
τ(代码中设置为0.5)使其逼近argmax。
1.2 熵正则化
通过阅读MADDPG源码,得知actor的更新使用了熵正则化技巧。区别与SAC的最大化熵学习,MADDPG的熵只是作为一个正则项加在loss上,而SAC显式地在优化目标中使用熵,并学习一个自动调节的温度系数 α \alpha α。
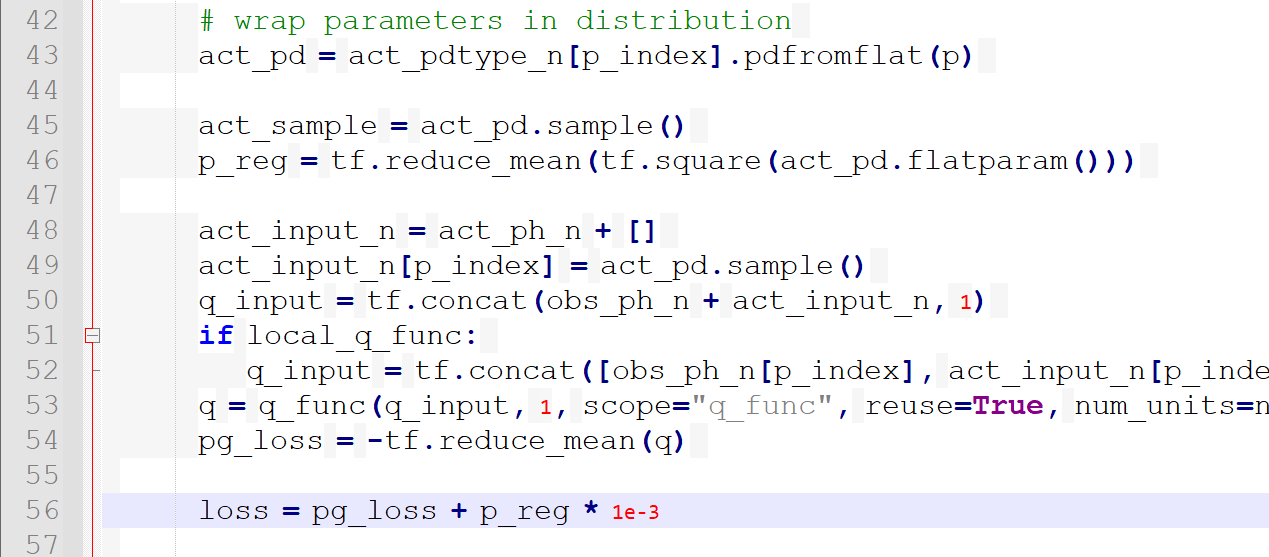
MADDPG源码部分如下,看到最终loss除了基本的梯度上升最大化Q值,还包括了熵正则项,系数为1e-3。实验中该部分的设置与MADDPG源码一致。
使用熵正则化技巧可以让策略更鲁棒。对比实验结果具体见下图。
1.3 细节及展示
-
MPE的simple spread环境中,所有智能体的观测空间、动作空间以及功能完全一致,属于同构智能体,故所有智能体可以共享参数,进而减缓惰性智能体lazy agent的出现。
-
与作业2一致,这里的MADDPG使用其改进版MATD3实现。即使用探索噪声和策略噪声、使用Twin网络、延迟更新Actor网络和目标网络。
-
具体实现中设置一个episode后更新n次,而不是一个step更新一次,具体地设置n=1,即一个episode后更新一次网络参数。尽管n取2或者更大可能会带来更好的收敛效果,但这里没有进行繁琐的参数尝试和调试。
使用熵正则项和不使用熵正则项的收敛值分别为-4.7、-4.8,学习曲线如下,具体数值见相应的MATD3.log文件。
可以发现使用熵正则化后效果稍优,而且可以清晰地看到,在训练后期会更加稳定。


2. VDN for simple spread
2.1 VDN思想
VDN的思想是用各合作智能体自己的局部Q值之和,来近似团队的Q值,并基于团队Q值的TD error来更新参数。由于团队Q值 Q t o t Q_{tot} Qtot来自各智能体的Q值 Q a Q_a Qa,故TD error反向传播会分散到各个智能体的Q网络,体现出值分解Value Decomposition。
2.2 细节及展示
-
实现中使用DRQN代替DQN,希望使用循环神经网络(具体为GRU)结合过往的观测及动作信息 (具体实现为隐藏状态+上一时刻的动作),缓解局部观测带来的局限性,进而使输出的Q值更加准确。
由于每个timestep的动作不仅与当前的局部观测有关,还与上一时刻的动作以RNN的隐藏状态相关,因此就不能以timestep为单位从经验池随机抽取经验进行学习。所以这里以episode为单位存储经验,训练时从经验池一次随机采样多个episode进行学习。 -
与Double DQN的思想类似,为减缓高估,计算下一时刻的Q值时,用 m a x a ′ Q t a r g e t ( s ′ , a ′ ) \underset{a'}{max}\,Q_{target}(s', a') a′maxQtarget(s′,a′)代替 m a x a ′ Q ( s ′ , a ′ ) \underset{a'}{max}\,Q(s', a') a′maxQ(s′,a′),即单个智能体自己的局部Q值计算方式为 t a r g e t _ q = r + γ ∗ ( 1 − m a s k ) ∗ Q t a r g e t ( s ′ , a r g m a x a ′ Q ( s ′ , a ′ ) ) target\_q = r + \gamma*(1-mask) *Q_{target}(s',\underset{a'}{arg\,max} \,Q(s',a')) target_q=r+γ∗(1−mask)∗Qtarget(s′,a′argmaxQ(s′,a′))
-
ϵ − g r e e d y \epsilon-greedy ϵ−greedy设值起始最大值为0.9,终止最小值为0.01,且在前 t o t a l _ e p i s o d e s / 5 total\_episodes/5 total_episodes/5 回合内由起始最大值指数递减为终止最小值,然后保持最小值不变。
-
同质智能体间使用共享参数,进而减缓惰性智能体lazy agent的出现。
-
实现中设置一个episode后更新n次,而不是一个step更新一次,具体地设置n=1,即一个episode后更新一次网络参数。
学习曲线如下,收敛在-5.2左右,具体数值见VDN.log。

3. QMIX for simple spread
3.1 从VDN到QMIX
基于价值的MARL算法的基本假定是IGM (Individual Global Max)条件,即整体Q值
Q
t
o
t
Q_{tot}
Qtot最大时对应的联合动作为各智能体局部Q值
Q
a
Q_a
Qa最大时对应的动作。
VDN为了满足IGM条件,直接简单地将
Q
t
o
t
Q_{tot}
Qtot分解为各
Q
a
Q_a
Qa的加和形式,此时
∂
Q
t
o
t
Q
a
=
1
\frac{\partial Q_{tot}}{Q_a} =1
Qa∂Qtot=1。
QMIX对VDN作出改进,针对如何分解
Q
t
o
t
Q_{tot}
Qtot这一点,提出了更一般化的单调性条件,即只要求
∂
Q
t
o
t
Q
a
≥
0
\frac{\partial Q_{tot}}{Q_a} \geq 0
Qa∂Qtot≥0即可,具体代码实现时将分解系数
w
w
w设置为非负。
3.2 细节
使用的技巧与上述VDN中2.1节完全一致,即用DRQN代替DQN,Double DQN减缓Q值高估, ϵ − g r e e d y \epsilon-greedy ϵ−greedy的设置、参数共享等。它们在VDN部分已经介绍,这里不再展开。
3.3 全局状态分析
全局状态s的获取,通常有两种做法,使用环境接口提供的全局状态,或者拼接concate各个智能体的局部观测作为全局状态。
此外,MAPPO论文中还介绍了Agent-Specific Global State (AS),即拼接环境提供的全局状态和各智能体的局部观测。显然AS会造成输入维度过高,因为存在重复冗余的信息。为此,MAPPO还提出了Feature-Pruned Agent-Specific Global State (FP),即在AS基础上去除重复的特征。
由于simple spread场景 (包括整个MPE环境) 没有提供全局状态,故MAPPO中的AS及FP方法没法使用。
关于全局状态,这里做了三种定义:
- 拼接各智能体的局部观测作为全局状态,其
d i m _ s t a t e = d i m _ o b s ∗ n u m _ a g e n t s dim\_state=dim\_obs*num\_agents dim_state=dim_obs∗num_agents; - 拼接各智能体的局部观测和上一时刻的动作作为全局状态,其
d i m _ s t a t e = ( d i m _ o b s + d i m _ a c t i o n ) ∗ n u m _ a g e n t s dim\_state=(dim\_obs+dim\_action)*num\_agents dim_state=(dim_obs+dim_action)∗num_agents; - 拼接各智能体的局部观测、上一时刻的动作及RNN的隐藏状态作为全局状态,其
d i m _ s t a t e = ( d i m _ o b s + d i m _ a c t i o n + d i m _ h i d d e n _ s i z e ) ∗ n u m _ a g e n t s dim\_state=(dim\_obs+dim\_action+dim\_hidden\_size)*num\_agents dim_state=(dim_obs+dim_action+dim_hidden_size)∗num_agents。
由于作业要求QMIX算法对episodes总数不设限制,加之其本身网络结构比VDN更加复杂,这里又定义了三种全局状态用以对比实验,训练时间较久,调参实在不易,而且对算法思想的学习没有太大帮助,这里没有进行全面、细粒度的调参。
三类全局状态的对应的收敛曲线如下,最终的收敛值分别为-5.2、-5.3、-5.0,具体数值见相应的log文件。



可以看到,拼接各智能体的局部观测、上一时刻的动作及RNN的隐藏状态作为全局状态,这种情况下,效果最优(收敛值在-5.0之上)。
4. 总结
MADDPG、VDN、QMIX都采用了集中式训练、分散式执行 (CTDE) 的框架,即训练时用到了全局信息,包括全局状态 (或所有智能体的局部观测) 和全局动作,每个智能体决策时仅基于自己的局部观测。它们的区别在于:
VDN、QMIX是基于值分解的算法,是单智能体DQN算法在多智能体上的扩展。由于基于团队奖励,它们只能处理合作型的任务或环境,并且和DQN一样,它们没法直接处理连续性动作,因为没法穷举所有动作来选取使Q最大的动作,即 a r g m a x a Q ( s , a ) \underset{a}{argmax}\,Q(s,a) aargmaxQ(s,a)。
MADDPG算法,属于Actor-Critic算法,Actor网络使用策略梯度的梯度上升方法训练,Critic使用TD error训练。每个智能体都有其自己的中心式的Critic网络 (同质智能体可以采用参数共享),专门对该智能体进行评价,而不是采用值分解的方式对整个团队评价,这一性质也使得MADDPG能够处理异质智能体间的竞争情形及混合情形,当然也能处理合作型的场景。















 2971
2971











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









