








threshold = 0.1
part = 1
probMap = output[0, part, :,:]
mapSmooth = cv2.GaussianBlur(probMap, (3, 3), 0, 0)
mapMask = np.uint8(mapSmooth > threshold)
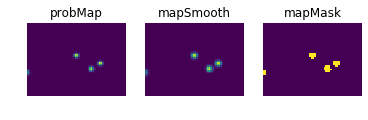
plt.subplot(1, 3, 1)
plt.imshow(probMap)
plt.title("probMap")
plt.axis("off")
plt.subplot(1, 3, 2)
plt.imshow(mapSmooth)
plt.title("mapSmooth")
plt.axis("off")
plt.subplot(1, 3, 3)
plt.imshow(mapMask)
plt.title("mapMask")
plt.axis("off")
plt.show()一,关键点检测
流程如下:probmap->高斯滤波->得到mapMask
1.cv2.GaussianBlur:高斯滤波,是一种线性平滑滤波,对于除去高斯噪声有很好的效果。
2.mapMask为prob二值图,>threshold为1,其他为0
二,关键点坐标值
为了找到关键点的确切位置,我们需要找到每个blob的极大值。通过以下步骤实现:
1.首先找出每个关键点区域的全部轮廓
2.生成这个区域的遮盖(blob mask)
3.通过用probMap乘以这个遮盖,提取该区域的probMap
4.找到这个区域的本地极大值。要对每个轮廓(即关键点区域)进行处理。
threshold = 0.1
part = 1
probMap = output[0, part, :,:]
probMap = cv2.resize(probMap, (img_cv2.shape[1], img_cv2.shape[0]))
mapSmooth = cv2.GaussianBlur(probMap, (3, 3), 0 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 631
631











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









