







 本文提出了一个用于水上自动导航船(waterborne AGV)在多码头间运输(ITT)的闭环调度和控制方法。该方法结合了考虑安全时间间隔的调度模型和分布式控制策略,以实现节能和高效。通过仿真验证,证明了闭环方案在处理实时因素、干扰和碰撞避免方面的优势,优于传统的开环方案。
本文提出了一个用于水上自动导航船(waterborne AGV)在多码头间运输(ITT)的闭环调度和控制方法。该方法结合了考虑安全时间间隔的调度模型和分布式控制策略,以实现节能和高效。通过仿真验证,证明了闭环方案在处理实时因素、干扰和碰撞避免方面的优势,优于传统的开环方案。
Closed-loop scheduling and control of waterborne AGVs for
energy-efficient Inter Terminal Transport
高效节能多码头运输AGV船集成调度与控制
作者:Huarong Zheng;Rudy R. Negenborn;Gabriël Lodewijks
摘要
本文提出使用水上自动导航船(waterborne Autonomous Guided Vessels,waterborne AGV)应用于多码头间运输(ITT),进行系统的闭环节能调度和控制。提出了一种考虑不同水上AGV停泊时隙安全时间间隔的取-送问题(pick-up and delivery problem)。水上AGV以协作分布式方式执行指定的计划。实时调度和控制回路由一个局部调度模型和忽略的下层因素的反馈交互模型组成。仿真结果证明了所提出方法的有效性以及将水性AGV应用于自主ITT系统的潜力。
关键词:
- Closed-loop scheduling and control
- Coordinated berthing times
- Energy efficiency
- Inter terminal transport
- Waterborne AGVs
1 引言
预计到2035年,鹿特丹港每年将处理3000多万个20英尺箱(TEU)(Port of Rotterdam Authority, 2011)。 而其中的很大一部分实际上将在多码头间进行,即多码头间间运输(ITT)(Tierney et al., 2014)。 ITT先前提出了一种新型车辆类型,即水上自动导航船(waterborne Autonomous Guided Vessels,waterborne AGV)(Zheng et al., in press, 2015)。 自2000,wAGV由于其以下特性在大型港口展示出了巨大的运输潜力:
- wAGV无需人工成本
- wAGV提供了另一种运输方式来处理预期的大吞吐量,而不是利用港口地区有限的土地进行道路交通
- wAGV可与陆地自动引导车辆(AGV)相媲美,可全天候运行,性能可靠,提高港口效率
- 对于陆路距离比水路距离长的码头,水上AGV比公路车辆节省能源
- wAGV符合智能港口的发展,被认为与鹿特丹港的ITT实践非常相关
之前关于wAGV的工作(Zheng等人,出版,2015年)一直专注于在控制层面设计高效控制器。Zheng et al.(2015)采用协同分布式方式控制多个wAGV,每个wAGV给定一个固定的ITT请求,即以开环方式解决调度和控制问题。 与制定经济和环保决策的共同目标样,wAGV的调度和控制有望以闭环方式实现进一步的效益,并实现更紧密的集成。
然而,调度和控制通常作为运输决策层次中的两个不同层次,已经被这两个领域的研究人员独立探索。 图1显示了典型的水下agv ITT系统的类似水平。
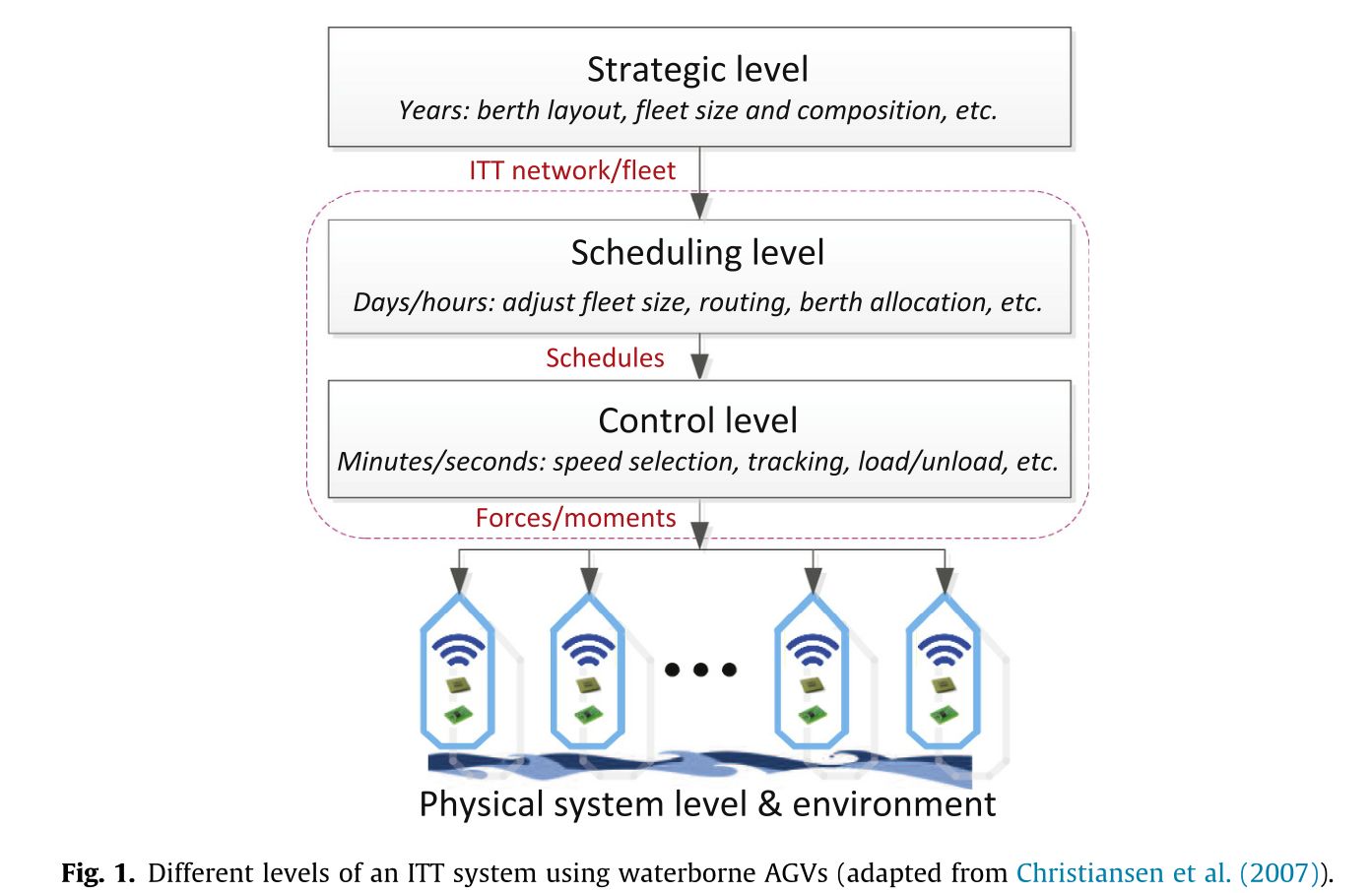
在ITT系统内,港务局运营一支wAGV车队,穿梭于港口区域内的各个码头之间,以经济高效的方式运输集装箱。 关于泊位位置(仅适用于wAGV)、车队规模和组成问题等的战略决策是以年为单位的长期决策。调度和控制级别分别确定每个wAGV在小时时间尺度上发生的时间事件和在秒时间尺度上发生的输入功率,以确保这些事件按计划执行。 泊位位置(仅适用于wAGV)、车队规模和组成问题等属于战略决策,是以年为单位的长期决策。调度和控制层面分别确定每个wAGV在小时时间尺度上发生的时间事件和在秒时间尺度上发生的输入功率,以确保这些事件按计划执行。换言之,码头和访问时间,装卸集装箱的量基于离散事件,然而在操作约束和不确定情形下,控制问题通常的考虑是快速的、低级的、动态的,并认为是近似连续的。 尽管这两个层次在很大程度上都依赖于数学模型和优化技术,并且都以利润最大化或成本最小化为目标,但固有的不同时间尺度性质为集成和计算可处理的解决方案带来了技术挑战。 一方面,调度问题中涉及的离散决策只限于低频离线求解的低维模型;另一方面,实时反馈和闭环操作对于控制系统处理干扰和复杂动力学至关重要。 一方面,涉及的离散决策的调度问题只限于低频离线求解的低维模型(low dimension models);另一方面,实时反馈和闭环操作对于控制系统处理干扰和复杂动力学至关重要。Xin等从“自上而下”的角度考虑调度问题中的控制元素,Angeli从“自下而上”的角度考虑控制问题的成本函数(cost function),成本函数包含以调度为导向的经济条件。在制造工业(process industry)领域,集成调度和控制的经济效益最近得到了认可和强调。 Du等提出了一个“时间尺度桥接”模型,但该模型依赖于输入/输出过程动力学的显式低阶表示,这对于一般系统来说是很难推导的,而且没有考虑操作约束。到目前为止,还没有一个较好的(decent solution)集成调度和控制的解决方案。
尽管如此,从层次上讲,调度和控制问题都得到了很好的解决。 ITT wAGV调度本质上是一个具有时间窗和车辆容量约束的提货和交付问题(pick-up and delivery problem, PDP)。PDP是车辆路径问题(VRP)的推广。 PDP和VRP都需要确定车队车辆的一组最佳路线,但不同之处在于,PDP处理不同提货和交货地点之间的运输,而在VRP中,提货和交付地点需要相同,如配送中心(depot)。在运筹学领域内,我们通常只关注离散事件的时间表,而忽略这些事件如何真正发生的任何细节,这已足够。 然而,从控制的角度来看,在VRP或PDP问题中车辆实际上被假定为无量纲质点,主要具有恒定的速度,因此任何较低级别的反馈在调度问题中并不是很重要。我们观察到VRP的两种变体是例外。 时间相关VRP(time-dependent VRP)(Figliozzi,2012)采用时间相关速度模型,该模型在一定程度上考虑了较低级别的信息,例如:交通堵塞。 但速度模型是事先已知的,而不是可以操纵的决策变量。 时间相关的VRP属于更通用的动态VRP类别(Psaraftis et al.,2016),处理动态性,如在线请求和动态旅行时间,并相应地更新路线。 具有可接受计算效率的解决方案在很大程度上是动态VRP关注的问题。第二个例外是Bektas and Laporte (2011)提出的,该研究考虑了生产“环保”车辆路线时的负荷和速度等因素。由此产生的问题更难解决,但成本更低。 然而,组合的路径速度优化是开环的,远不能考虑较低级别的复杂动力学。
在海事部门,船舶速度和能源消耗之间的关系更受到从业人员和研究人员的重视。马士基“Triple-E”(马士基,2013)的发动机设计为相对缓慢地航行,以减少图1。使用水上AGV的ITT系统的不同级别(改编自Christiansen等人(2007))。262小时。郑等人。/运输研究第E 105部分(2017年)261–278亚洲和北欧运输路线上二氧化碳排放量的50%。航运业的另一种常见做法称为“慢航”(Maloni等人,2013年),即以低于设计速度的速度巡航以降低成本,这一做法也已被广泛接受和实施(Psaraftis和Kontovas,2014年)。Fagerholt等人(2010年)和Norstad等人(2011年)对到达时间进行了优化,以获得沿航线的最佳速度。将该方法应用于实际航线的结果表明,减少环境排放的潜力是巨大的。除了强调速度外,协调船舶到达码头的时间以避免不必要的等待或冲突比陆基车辆更为关键。原因有两方面。首先,考虑到提货和交货地点有限,船舶访问同一码头的频率更高。ITT的情况尤其如此。事实上,大多数PDP假设不同的取车和交货地点,每辆车只访问每个地点一次(Savelsbergh和Sol,1995),这减少了到达时间的协调。第二,船舶装卸可能比陆基车辆需要更多的时间,因此不能忽视。Pang et al.(2011)对泊位时间冲突避免进行了建模,通过约束,对于共用同一泊位的接送和交付访问,访问的出发时间不得大于随后访问的到达时间。如果在出发时间和到达时间之间施加额外的时间间隔,这是有问题的,如果考虑到船舶尺寸和安全距离,这种情况实际上就是如此。海运物流的另一个特点是环境不确定性普遍存在。这些不确定性包括海流、波浪、风以及与其他移动物体的相遇,这些物体不仅在操作层面上与水上AGV动力学相互作用,而且还影响调度层面。这就需要一个闭环系统,包括调度和控制,根据实时反馈做出决策。
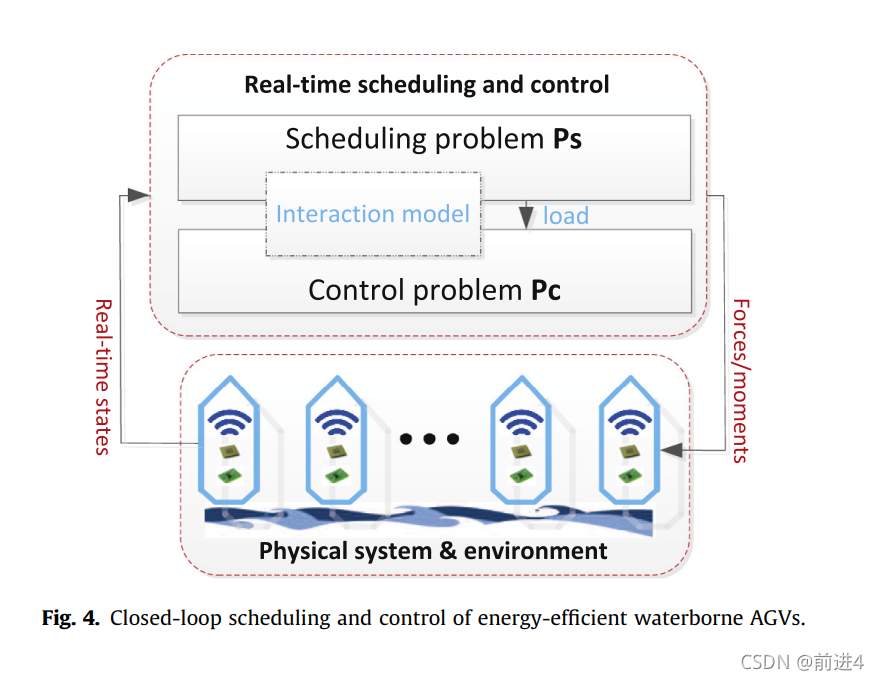
本文提出了一种新的闭环调度和控制方法,用于wAGV车队的自动化ITT系统。闭环意味着调度和控制层都会根据快速采样时间测量的系统状态在线做出决策。为了易于处理,决策仍分层进行。此外,还提出了一种新的PDP调度模型,该模型考虑了不同wAGV之间访问特定泊位的必要时间间隔。此外,我们还提出了一个有效解决的部分调度问题,以及一个集成了调度和控制问题的交互模型。解决调度问题为每个水上AGV生成一系列码头,以访问满意的服务时间窗口。基于快速ADMM算法(Zheng等人,2015)的协同分布式模型预测控制随后被相关水上AGV组应用,以安全准确地执行调度。与开环方案相比,使用闭环方案的主要优点是,在线更新的时间表可以及时反映实时因素,如未经考虑的物理系统限制、干扰和碰撞避免,这些因素即使不是不可能,也很难集成到调度问题中。
2 问题描述
本文研究的自动化ITT系统包括:能够处理高效节能码头中特定时间窗下特定O-D对的指定数量的集装箱需求的水上AGV船队。所作假设如下:
- 如图1,战略层面确定车队的规模及组成,假设总是有足够数量的wAGV。 注意,可用船队规模不一定与实际部署的船队一致,这是第3节中介绍的在调度级别做出的决定;
- 战略层面还需要考虑ITT网络。该网络包括:通过提供充电、维护、停泊等方式容纳wAGV的泊位,以及固定路线作为连接泊位的最短路径;
- 每个码头有一个wAGV泊位。实际上,一个码头可以有多个泊位,然后可以将其视为多个收货/交货地点,因此问题的表述基本上没有改变;
- ITT请求在不同的规划范围内解耦,以便在每个规划范围内产生的请求在该范围内完成。
wAGV的设计符合自主ITT系统的规范。每辆水上AGV的容量有限,可容纳不同需求的集装箱。 wAGV上安装有处理单元、测量和通信设备,以便它们能够测量自身的系统状态,在一定范围内与其他WAGV进行通信,并做出自己的控制决策。 此外,wAGV使用“环保”发动机,并尽可能低速巡航。 wAGV没有中央的配送中心,它们停留在最终服务泊位的停车场:开始工作时出现在泊位,完成所有任务后从泊位消失。 最后,wAGV具有一定的尺寸,需要与其他AGV保持一定的安全距离以避免碰撞。 在移动的wAGV之间通过合作分布式控制实现了避碰 (Zheng et al., 2015),而在同一泊位上执行装载或卸载操作的WAGV尚待协调。 图2显示了ITT系统的示意图,该系统包括3辆wAGV、6个wAGV泊位和12条路线。

鉴于上述ITT网络和可用的wAGV车队,应在做出决定后提供ITT请求列表。特别地,ITT的每一项请求都涉及七个方面的信息 :
- 请求ID,由所有请求的释放时间分割;
- 起始泊位的ID,对应于提货点;
- 目的地泊位ID,对应于交货点;
- 释放时间的定义是:一组集装箱准备装运的时间,即装载服务可以启动的最早时间;
- 交付时间,定义集装箱组准备好进行后续操作的时间,即完成该请求的最晚时间,包括目 的泊位的卸货时间;
- 以标准箱为单位装运的集装箱数量
- 装卸集装箱的服务时间。
此外,实际情况中会发生延误或等待,仅满足硬时间窗口可能无法找到可行的解决方案,因此允许在软时间窗口内为请求提供服务,但如果不在硬时间窗口内,则会产生客户不便成本。 请注意,也可以通过使用更多的wAGV来进行权衡,以减少延误。 需求不可拆分,即相同需求ID的集装箱不能由不同的wAGV装运。 最后,集装箱必须不可转运。即:对于每个请求,装卸操作只发生一次。
自动化ITT系统以闭环方式运行,即,图1中的调度和控制层得问题使用更新的系统状态实时求解。 Zheng et al.(2015) 实现了对WAGV车队的控制,而节能调度问题以及闭环调度和控制设计将在以下两个部分中介绍。
3 使用AGV船的码头间运输节能调度
传统上,船队在码头之间来回运输货物的调度问题依赖于具有较高能力和经验的人工调度员。复杂的决策需要满足各种可能相互冲突的目标(例如:低速航行节省能源,同时满足高速航行的时间窗口)考虑交通请求和可用车辆。将水上AGV分配到路线和时间安排可能会破坏这种运营商。面对实时操作延迟和不确定性,该问题可能会让人工调度员更加难搞。接下来,我们提出了一个基于混合整数规划的ITT调度模型,使用水上AGV减轻人工调度员的工作量。我们首先介绍了相关的符号,包括模型的输入参数和从该模型求解的决策变量。然后给出了数学模型,并将其进一步转化为一个混合整数线性规划(MILP)问题,以减少所需的计算时间。
3.3 转换为线性
上述非线性的线性化主要依赖于两种技术:离散化(Bektas和Laporte, 2011; Fagerholt等人,2010),逻辑和整数公式(Williams, 1977)。 首先通过离散化处理非线性速度函数引起的非线性问题。
5. 模拟实验与讨论
仿真结果验证了所提出的水下agv闭环调度控制方法的有效性。 ITT方案基于图2构建,有6个泊位和3个水上agv组成的船队。 如表1所示,假设在0-2100秒的调度范围内有7个ITT请求,可用请求信息结构根据Schroër et al.(2014)设计。 注意,在实践中,水运agv车队可能会更大,港口地区可能会出现更多的ITT请求。 这里设置的场景假设与第2节相同,即水运agv数量充足,不同规划层面的请求解耦,可以独立考虑小的请求集。 6个泊位的位置以经纬度确定,然后转换为惯性坐标系中的坐标,以1号泊位为原点。 用于ITT要求的可用的水下agv船队最初都位于1号泊位。
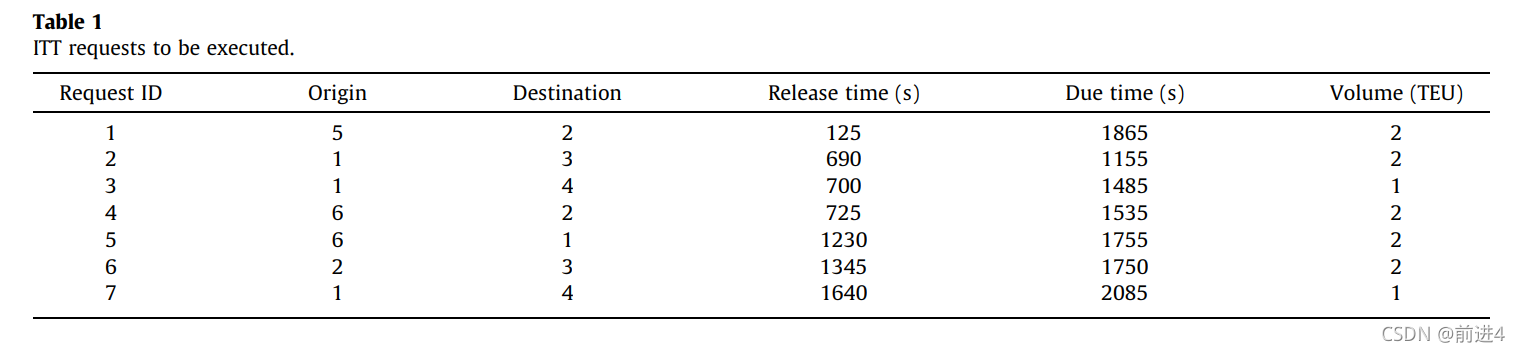
AGV船设计在u_min = 2:57 m/s、u_max=6:68 m/s的航速范围内航行,分别对应5节和13节。 每台水上AGV最多可携带4个TEU,即Q¼4,container的每一个TEU重mc¼24; 000公斤。 码头吊车的每一次移动可以装卸1 - 2个teu,需要120秒(Tierney et al., 2014)。 因此,对于表1中的所有ITT请求,服务时间均为ts¼120秒。 不同的水上AGV访问同一泊位所需的安全时间间隔设置为基于T¼60 s的水上AGV长度和航速。 与水上AGV动力学相关的其他参数如Zheng等人所述(正在出版中)。 成本函数(1)、(34)和(46)中不同性能指标权衡的权重参数设置为: C2¼102; C3¼102; C4¼103; C5¼108; C6¼108; c7¼100; c8¼100; c9¼1。 算法在MATLAB 2011b (MATLAB, 2011)中实现。 优化问题由Cplex (ILOG, 2016)解决。 所有仿真都在Intel (R) Core (TM) i5-3470 CPU @3.20 GHz的平台上运行。
图4所示的闭环调度和控制算法需要替代人工操作人员进行“智能”决策: (1)对于水运AGV船队,在满足最大承载能力、舵力范围等物理限制的前提下,自主生成执行上述计划的节能计划和执行器输入,并保证安全; (2)在国际货物运输ITT请求清单中,在放行时间之后和到期时间之前,应将一定数量的集装箱从指定的出发地运往目的地; (3)每个泊位最多可容纳一辆水运AGV,不同水运AGV的服务时隙应保持缓冲时间间隔。 然后给出了这三个方面的仿真结果,以证明该算法的有效性。
5.1 从AGV船的角度
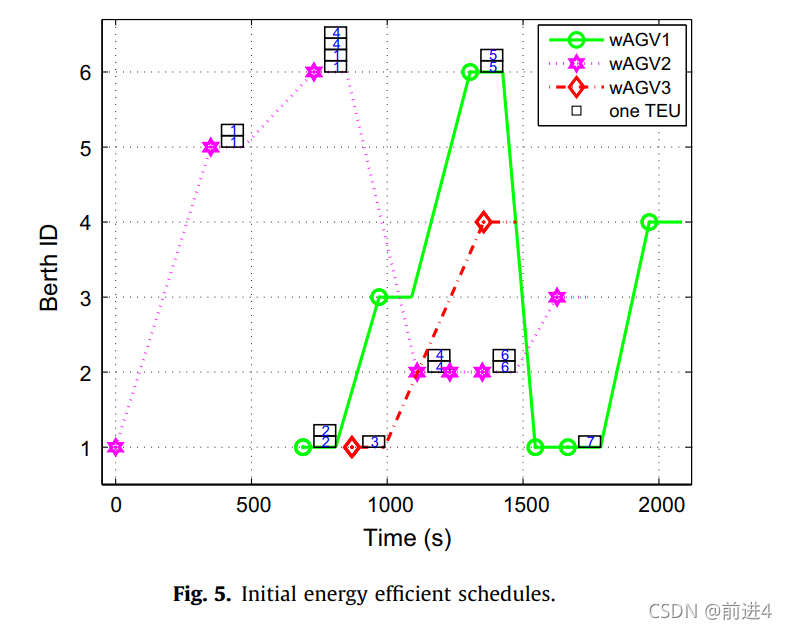
表1中所示的7个ITT请求集合对求解问题(1)-(28)的3个水上agv的初始调度如图5所示,分别用绿圈2线、品红六芒虚线和绿方虚线表示。 三辆水运agv均从1号泊位出发,但时间不同。 小矩形是一个TEU集装箱,所附的数字是该集装箱所属请求的标识。 我们展示了水上agv离港泊位上集装箱的设置和组合。 每个进度表包含了访问泊位的顺序、相应的到达和出发时间以及每个泊位的装卸作业等信息。 以水运AGV 2的进度表为例,在水运AGV 2到达泊位时放置一个六元图。 由于水运AGV 2在2号泊位进行了三次装卸作业,所以在1000秒到1500秒之间2号泊位有三个卦。 从集合和混合容器上离开时,我们可以推出水性自主移动小车2首先卸载的两个容器请求1 120年代,然后卸载的两个容器请求4采取另一个120年代最后加载两个容器从请求6之前离开泊位2泊位3就是它的最终目的地。
所有路段的行驶速度也得到了明显的优化。 事实上,只要知道泊位号、到达时间和出发时间,就可以很容易地从5推导出旅行速度。 水上AGV 2沿其路径的行驶速度分布图如图6所示。 从图5中还可以看出,三辆水运agv均不超过4个TEU集装箱。 图7进一步显示了整个模拟过程中船上的集装箱总数,且都在4个TEU集装箱的最大容量范围内。
如图5所示的水上agv接收计划,首先以保证运行安全为目标,其次以执行这些计划为目标。 由于在调度问题中没有考虑复杂的系统动力学、物理限制、干扰和在移动的水上agv之间的避碰,实时水上 agv不一定安全且按计划运行:以指定的速度遵循预定的路线,在指定的时间到达预定的泊位。 图8分别为三种预定水性agv的速度演化图。 三个自由度的速度:浪涌,摇摆和偏航都在安全机动范围内,如红线所示。 浪涌速度是时间的函数,与图6所示的事件函数的调度问题中确定的分段恒定速度不同,浪涌速度有波动。 这是由于在真实环境中操作时需要加速和减速。 在调度问题中根本没有考虑横摆速度和横摆率。
5.2 从ITT请求的角度
5.3 泊位角度
如图2所示的6个水运AGV泊位,每一个泊位设计为一次最多处理1个水运AGV,考虑到水运AGV的尺寸,不同水运AGV访问同一泊位进行泊位实践需要有一定的时间间隔,以保证安全。 换句话说,受(13)和(14)约束,一辆水运AGV的出发时间应至少比下一辆水运AGV的到达时间早规定的时间间隔T¼60秒。 从泊位角度来看,图13-15分别展示了初始调度的泊位占用情况、t - 750 s实际调度的时间以及水运agv实际执行的泊位占用情况 。
对于所有泊位,在三幅图中,在一条水平线上有不同颜色的条距,表示不同的水上agv访问同一泊位。 特别在图15中,实际靠泊时段1、3、4、6号泊位分别为不同的水上agv的到访次数。 最小实际时间间隔为60 s P T ð最小安全时间intervalÞ,发生在1号泊位的水运agv 1与3之间。 然而,对于一个水上AGV在一个泊位执行多个装卸作业人员,没有时间间隔。 这可以通过连接在一起的相同颜色的条来显示,例如,图13中2号泊位的三个品红条。 实际上,根据5.1节分析的图5,水上AGV 2在2号泊位进行了三次装卸作业。 请注意,图13和图15中1号泊位的垂线表明,水运AGV 2从1号泊位直接移动到5号泊位,在1号泊位不进行任何装卸作业。 线路而不是条形,即没有装卸作业,可能只出现在水运agv的初始位置(本方案中的泊位1),因为任何其他水运agv访问泊位都涉及ITT的要求,需要装卸一定量的集装箱,因此需要一定的服务时间。 原则上,所有时段(条)应不短于ts¼120秒。 图14中较短的时段,如1号泊位上较短的绿条和6号泊位上的第一个品红条所示,是因为在t - 750 s进行了一定的服务。 如果杆长超过ts¼120秒,则意味着水上AGV需要等待一段时间才能启动负载服务(释放时间)。
6 结论与研究展望
本文提出了一种适用于多码头间运输(ITT)的AGV船实时集成调度与控制方案。 贡献主要有两方面。 首先,考虑了单个泊位上AGV船服务时段之间的安全时间间隔,提出了一种新的基于AGV船舶装卸调度模型。 对于所有泊位,不同的AGV船都保证了安全时间间隔。 其次,提出了一种有效求解的局部调度问题。 通过将该部分调度问题与多个AGV船的控制问题相结合,实现了一个自主式ITT系统的实时集成调度与控制。 在我们基于鹿特丹港潜在的ITT场景的仿真实验中,集成方法满足了所有ITT请求的时间窗,“不性能”率为0%,而开环方法的“不性能”率为41.67%。 该算法为利用AGV船实现自主ITT系统提供了一种有效的方法。
鹿特丹港已经见证了陆侧agv的大量开创性应用(例如,在ECT和APMT码头)。 对于水上agv,繁忙集装箱码头的小型自主ITT系统可以首先建造和测试。 对于更复杂的网络,仍然需要做出关于成本效益分析、位置、基础设施等方面的战略决策。 其他港口的广泛应用需要更多的技术、方法和宪法方面的进步。 因此,实验测试被认为是我们未来的研究工作之一。 此外,对于主要在集装箱码头内运行的陆侧agv,如果设计为自由放送,也可以受益于所提出的集成调度与控制算法。 在未来,这种算法也有可能应用于水陆混合AGV甚至两栖车辆系统。 在本文方法方面的基础上,未来的研究还将考虑在规划范围内动态处理ITT请求的ITT调度模型以及相应的有效解决方法。 同样,浪涌、摇摆和偏航的控制输入与复杂的系统动力学和环境相互作用,以实现控制目标,均在图9所示的安全限制范围内。
水性agv被平等地视为以分布式方式控制的agent,并使用Zheng等人(2015)提出的快速分布式控制方法共同做出控制决策。 在执行分配请求的过程中,水运agv之间可能会发生冲突。 分布式控制算法保证了ITT要求的每个水下AGV的完整填充,同时实现了所有水下AGV的最低成本和安全性。 水下AGV 3在跟踪误差较小的情况下的路径跟踪性能如图10的上半部分所示。 由于启动和遇到水性AGV 2和1,在开始和1200 s左右出现波动。 然而,当水上agv处于近距离时,控制水平保证了与它们的安全距离。 图10底部子图显示了水运AGV 2与另外两辆水运AGV之间的距离,这两辆水运AGV均在最小安全距离以上。 更多关于水上AGV跟踪性能和避碰行为的细节可以在附件的影片中找到。

















 8万+
8万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









