









!!! 有需要的小伙伴可以通过文章末尾名片咨询我哦!!!
💕💕作者:小马
💕💕个人简介:混迹在java圈十年有余,擅长Java、微信小程序、Python、Android等,大家有这一块的问题可以一起交流!
💕💕各类成品java系统 。javaweb,ssh,ssm,springboot等等项目框架,源码丰富,欢迎咨询交流。学习资料、程序开发、技术解答、代码讲解、源码部署,需要请看文末联系方式。
题 目 基于卫星无源探测的空间飞行器
主动段轨道估计与误差分析
摘 要
为对基于无源探测的飞行器进行主动段轨道估计和误差分析,我们利用空间几何知识、经典力学、数值计算、统计学以及曲线拟合等数据处理方法,
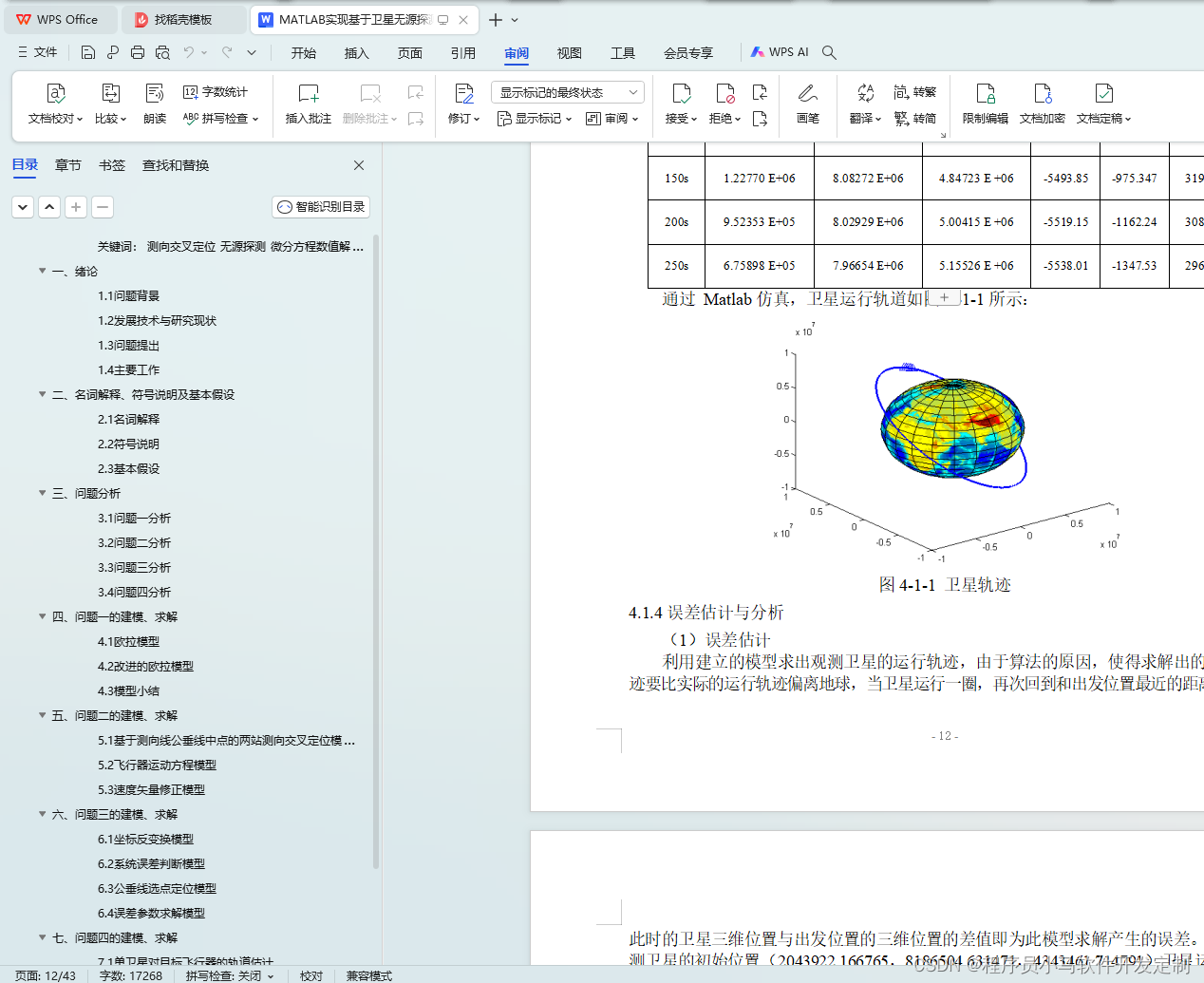
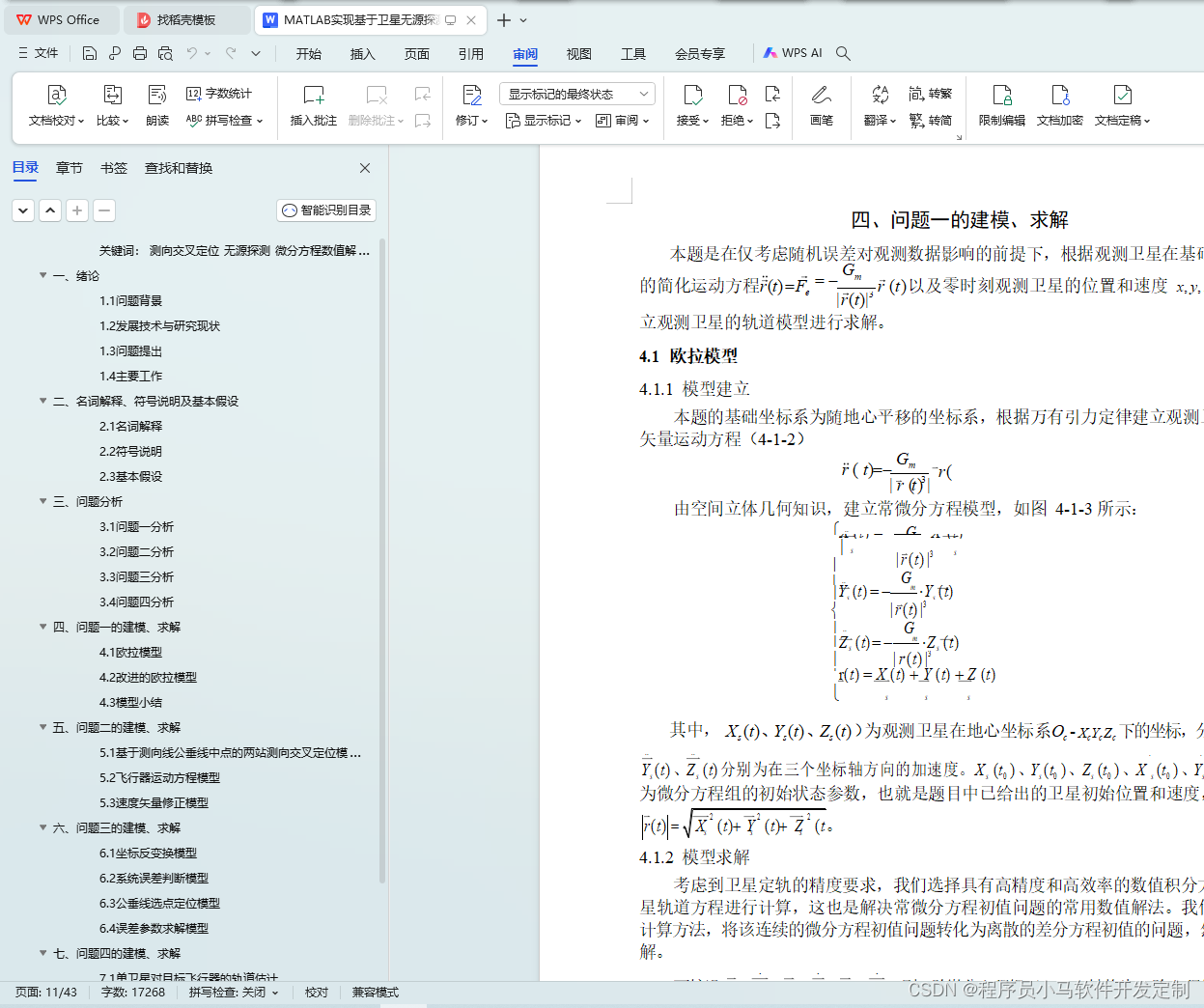
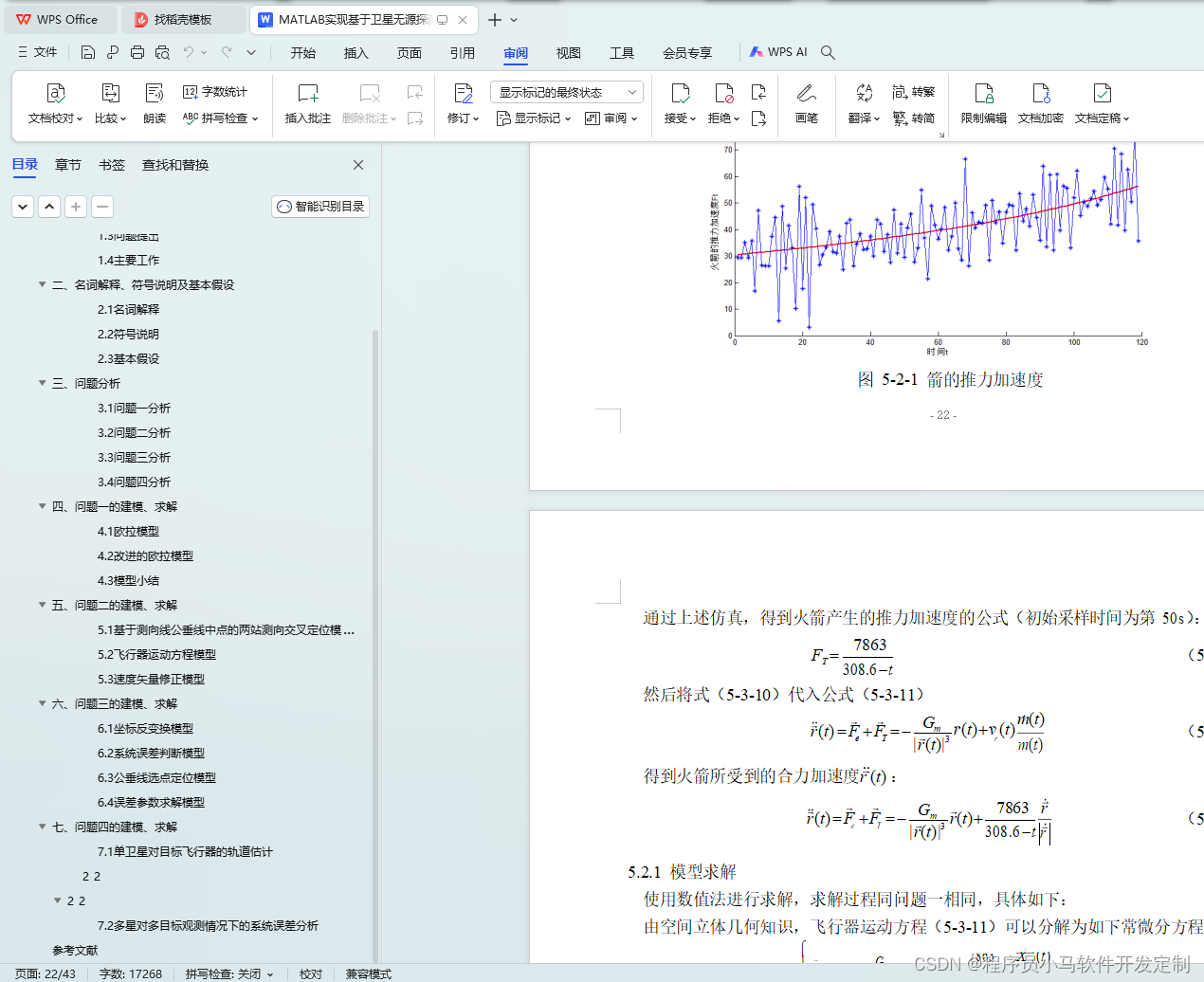
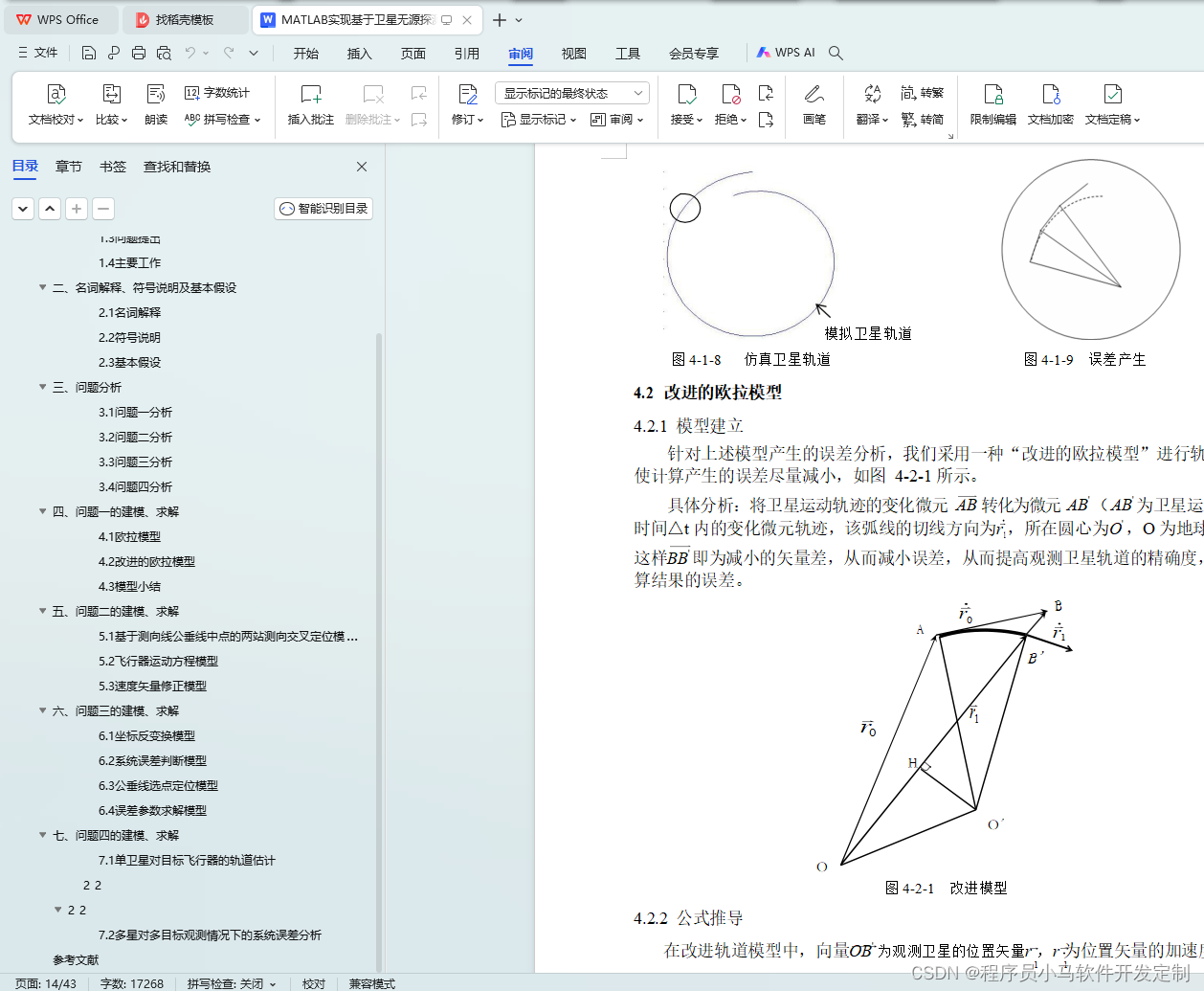
针对问题一,建立微分方程模型,利用欧拉法对常微分方程组进行数值求解,并通过仿真实验模拟卫星公转一周后的轨道偏差,进行误差分析。然后基于动力学知识提出一种改进模型,有效提高轨道计算精确性。
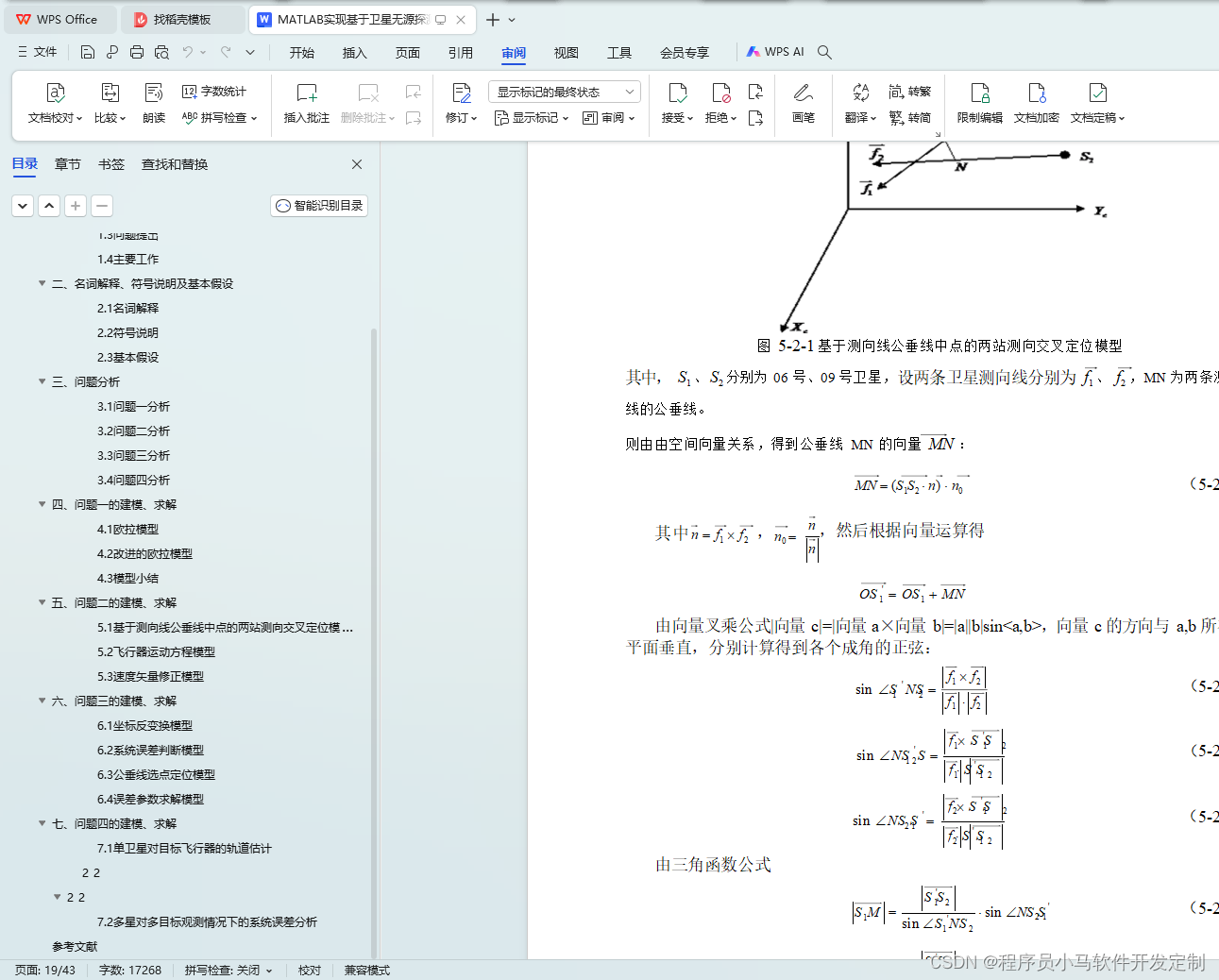
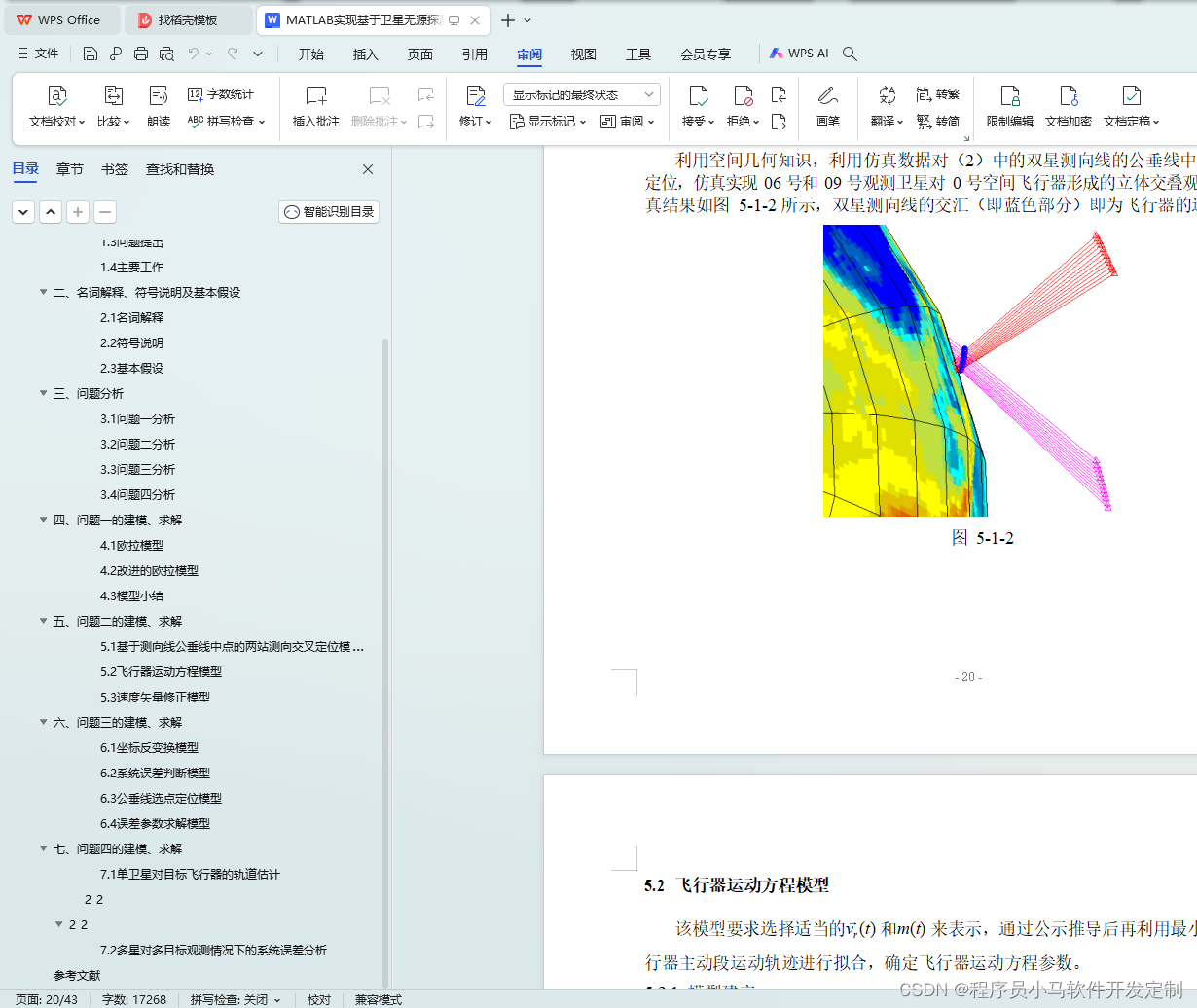
针对问题二,首先建立基于测向线公垂线中点的两站测向交叉定位模型,利用立体几何知识以及逐点交汇定位的思路,通过向量运算方法逐点定位目标,仿真 06 号和 09 号观测卫星对 0 号空间飞行器的立体交叠观测轨道;然后选取线性质量变化方程m(t) = m0 - kt ,建立飞行器运动方程模型,通过分析和处理观测数据,拟合确定方程参数;最后利用无穷逼近方法,确定初值条件。
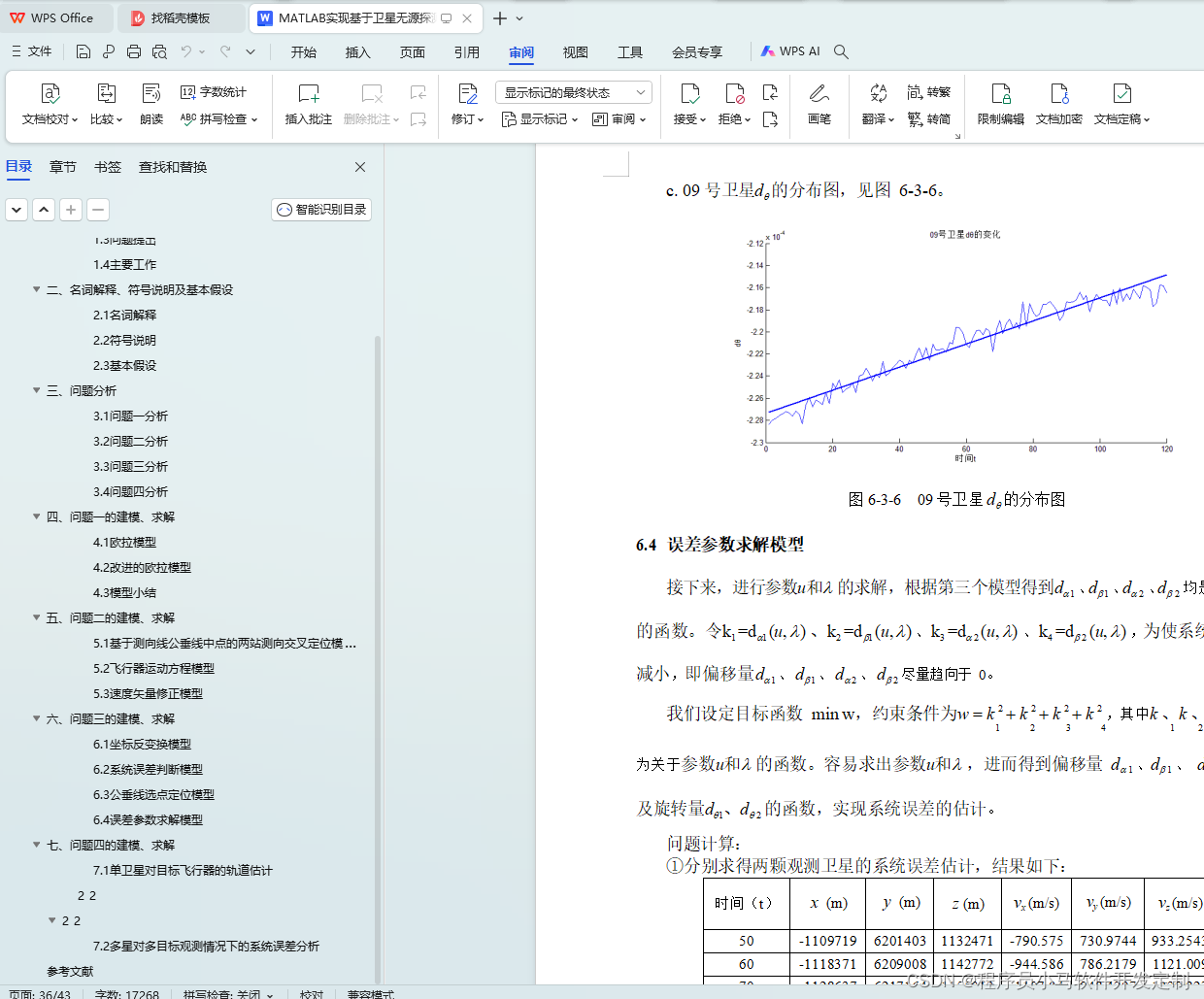
针对问题三,首先在问题二结果的基础上对误差偏移量进行分析,发现选取公垂线中点作为观测目标位置偏移量不稳定,不符合系统误差稳定性的要求。基于此,采用将各观测线的公垂线集合所组成的曲面近似展成平面矩形,化空间曲线轨道为平面直线, 重新建立选点定位模型,并设定指标w 评价系统误差的稳定性,建立优化模型并求解。
最后在考虑系统误差的情况下计算目标轨道,发现精确度明显提高。
针对问题四,对于单星测向定位的问题,假定单位时间内空间飞行器做匀加速直线运动,建立运动模型,使曲线上三点转化为直线上三点,运用立体几何和运动学知识, 建立方程组,对单星观测下空间飞行器的运行轨迹进行探究。对于多星观测多目标的情况,提出三星确定公切圆、多星选取最小公切圆的方法实现定位和误差分析。
目 录
5.1 基于测向线公垂线中点的两站测向交叉定位模型............................................................... - 17 -

更多项目:
另有1000+份项目源码,项目有java(包含springboot,ssm,jsp等),小程序,python,php,net等语言项目。项目均包含完整前后端源码,可正常运行!
!!! 有需要的小伙伴可以点击下方链接咨询我哦!!!
















 9414
9414











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











