







RL的形式化
首先我们定义强化学习中的马尔可夫决策过程MDP,用四元组表示:
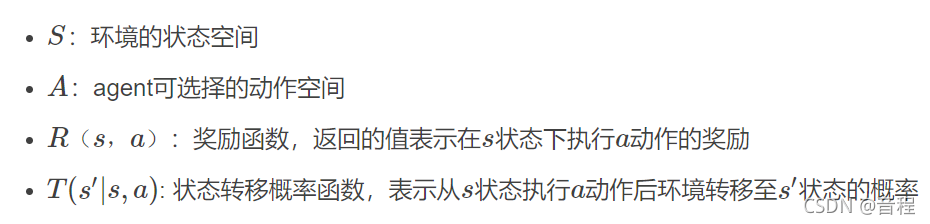
对于上面,我们先理解
T
T
T,其表达了环境的不确定性,即在当前状态
s
s
s下,我们执行一个动作
a
a
a,其下一个状态
s
′
s^{'}
s′是什么有很多种可能。这有点不符合我们的直觉,例如和我们通常看到的游戏可能不太一样,例如下面这个游戏(格子世界中的游戏之一:cliffwalkingv0悬崖)
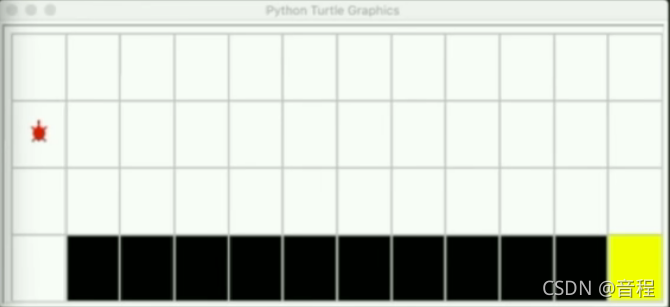
你往右走一步(action),接下来的状态就一定是如下
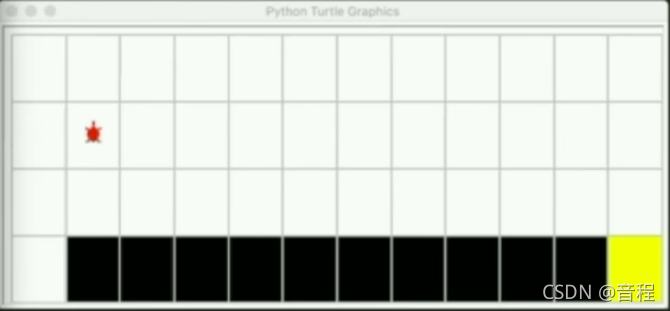
但是,我们试想这个例子,一只熊要吃你,假设你不是选择装死,而是选择逃跑,难道下一个状态你就一定是被吃吗?有可能你很灵活,或者跑得很快成功逃生,虽然这可能性很小。不管怎么说,当前状态是熊要吃你,你选择动作逃跑,下一个状态可能是被熊吃,也有可能是逃跑成功。
接下来,我们来理解一下那个奖励函数 R ( s , a ) R(s,a) R(s,a),因为根据上面 T T T的分析,我们知道 ( s , a ) − > s ′ (s,a)->s^{'} (s,a)−>s′,且 s ′ s^{'} s′不唯一。那么问题来了,既然 s ′ s^{'} s′不唯一,那 R ( s , a ) R(s,a) R(s,a)岂不是也不唯一?确实如此,但是我们这里的 R ( s , a ) R(s,a) R(s,a)你可以理解为期望,例如10%的概率是得到奖励100,90%的概率是得到奖励10,那么期望就是19,即期望意义上,从当前状态 s s s,执行这个动作 a a a,得到的奖励是19。
RL求解算法
注意,环境是人设计的,环境库我们使用最多的是open AI开发的gym。
再比如上面那个悬崖游戏,是gym内置的,这个就是一个环境,而这个环境对应的强化学习MDP四元组我们人一清二楚。
因为这个游戏就是我们人设计的,哪些地方放置悬崖(黑色),哪个地方放置终点(黄色),以及奖励:踩到悬崖多少分(默认-100,可以自己设计),以及动作空间(上下左右移动),以及状态空间(48个格子)等等。
但是问题在于,玩这个游戏的不是我们人啊,是一个机器,即一个agent。他根本不知道悬崖在哪里,终点在哪里,他只知道尝试,探索,然后根据得到的反馈,比如走了一步,突然得到-100分,就估摸着可能踩到悬崖了,然后明白了,以后尽量绕道,不要走那里。
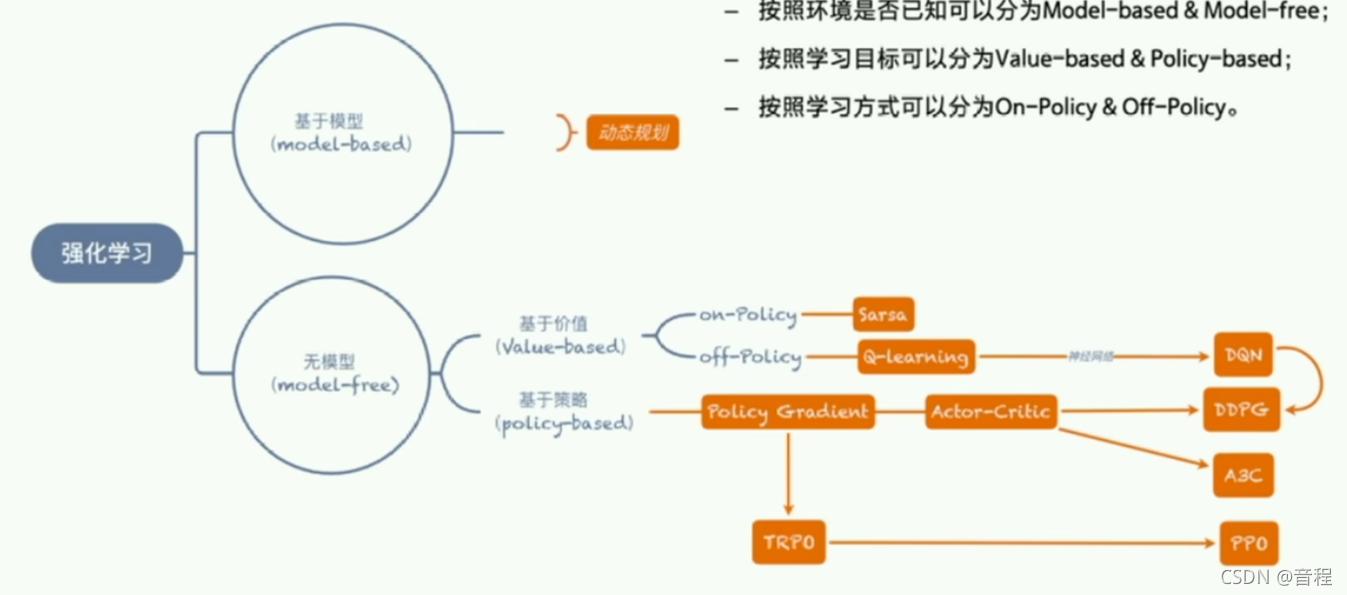
可以看到agent从一个开始乱走的小白变得越来越聪明,这从算法的角度来看,可以看作是一个求解过程,所以当然涉及求解算法(也就是强化学习算法),而这个算法可以分为Model-based和Model-free。
model-based:知己知彼,百战百胜
Model-based的思想:我们前面不是说了吗,我们人是知道环境的一切的,即那个MDP四元组,现在是机器(agent)不知道,那么求解算法就来了:把MDP四元组给求出来。怎么求?机器使用记忆(内存)保存MDP四元组,初始都初始化为空(0),然后让机器在那瞎尝试,使用MLE,即最大似然估计,慢慢填满整个MDP四元组,不断优化,去逼近真实的MDP四元组(我们人知道的那个)。举个例子,比如如果机器发现状态1往左走,每次都是状态0,那么转移概率就设置为1,即 p ( 0 ∣ 1 , l e f t ) = 1 p(0|1,left)=1 p(0∣1,left)=1。
这就是model-based,希望重构出整个环境,对环境一清二楚之后,不就可以选择最优策略了嘛(知己知彼,百战百胜)。
Model-free:两耳不闻窗外事,一心只读圣贤书
随着强化学习的发展,人们发现,有时候我们并不需要对环境进行建模也能找到最优的策略。
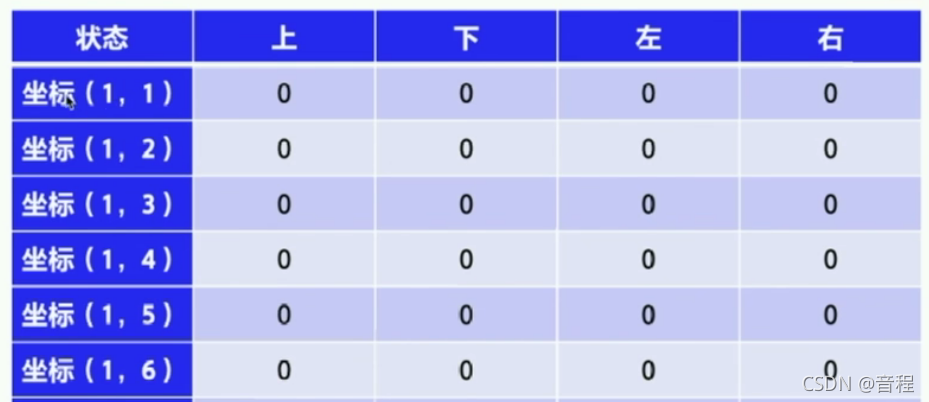
model-free的思想是:我不需要通过探索恢复出环境的MDP四元组来,而是只关心 Q ( s , a ) Q(s,a) Q(s,a)函数,即在状态 s s s时执行动作 a a a得到的长远性回报。注意其不同于 R ( s , a ) R(s,a) R(s,a),这个是移动完毕之后的即时回报。什么叫做长远性回报?例如救护车执行动作闯红灯,扣一分,但是因为闯红灯节省了时间,从而及时救治了一个病人加了100分,所以一共得了99分。这个扣一分就是即时回报,99分就是长远回报。
现在我们要做的就是直接估计出这个
Q
Q
Q值,一步到位,不再管其他东西,也不需要保存其他人任何东西。而只需要保存下面这个表格,我们称之为
Q
Q
Q表格,初始化为0,然后通过agent不断探索,尝试,采用一定的算法,慢慢填好这些数,就完成啦。这就是目标坚定的好处,正所谓:两耳不闻窗外事,一心只读圣贤书。
补充:这类方法研究得更火。
总结
在agent执行它的动作之前,它是否能对下一步的状态和回报做出预测,如果可以,那么就是model-based方法,如果不能,即为model-free方法。
来了!


















 5854
5854

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











