







文章目录
论文基本信息
《Online computation offloading and trajectory scheduling for UAV-enabled wireless powered mobile edge computing》
《无人机支持的无线供电移动边缘计算的在线计算卸载和轨迹调度》
China Communications Magazine https://ieeexplore.ieee.org/xpl/RecentIssue.jsp?punumber=6245522
南京邮电大学

场景描述:无人机辅助地面用户卸载和计算任务。
最小化长期平均能量效率EE。(EE指卸载单位数据量消耗的能量)
优化变量:地面用户cpu-cycle frequency,MID-m的传输功率,用于卸载的时间分配,无人机的水平坐标
摘要
无人机(UAV)支持的移动边缘计算(MEC)架构有望成为一种强大的技术,以促进5G和无处不在的无线连接和各种垂直应用和服务,随时随地。无线功率传输(WPT)是物联网(IoT)时代另一种有望延长低功耗无线设备运行时间的新技术。然而,WPT和无人机支持的MEC系统的集成还远远没有得到很好的研究,特别是在动态环境中。为了解决这一问题,本文研究了由无人机驱动的无线供电MEC系统的随机计算卸载和轨迹调度问题。无人机为物联网设备提供射频无线电功率传输和计算服务。考虑到随机任务到达和随机信道条件,提出了一个长期平均能量效率(EE)最小化问题。
由于该问题中变量的非凸性和时域耦合,利用李亚普诺夫优化方法,提出了一种低复杂度的在线计算卸载和轨迹调度算法(OCOTSA)。仿真结果验证了EE与服务延迟之间存在平衡,并证明了该方案所获得的系统EE表现性能优于其他基准方案。
1.引言
物联网(IoT)和5G无线技术的快速发展极大地促进了新的物联网应用程序的普及,如工业物联网(IIoT)、增强现实、监控和电子医疗保健[1]。它们还增加了计算密集型需求和移动物联网设备(MIDs)[2]有限的计算能力之间的张力。旨在支持计算密集型和延迟敏感服务的移动边缘计算(MEC)被设想为解决这一问题的一个很有前途的范例。使用MEC,物联网设备可以将部分或全部计算任务卸载到离本地设备更近的MEC服务器上。近年来,许多研究工作都致力于在mec支持的地面物联网系统[3–6]中开发有效的卸载方案。然而,随着对普遍通信和计算的需求的快速升级,传统的地面MEC系统可能无法以各种方式满足需求。由于无人机的优势,如自主性、灵活性和移动性,MEC服务器或云块可以安装在无人机上,在一些地理限制的区域[7]提供高效和可靠的计算服务。这种独立的MEC架构[8–10]有望成为一种很有前途的机制,以促进B5G/6G的普遍存在无线连接和计算服务,随时随地。
同时,许多地物联网设备通常受到有限的计算容量和电池寿命的限制。近年来,能量采集成为一种很有吸引力的技术,可以有效地延长小型物联网设备[11]的有效工作时间。与太阳能或风能充电等传统的能量采集技术相比,无线功率传输(WPT)更具有吸引力,因为它可以利用射频(RF)信号[12,13]提供可控和稳定的电源。研究已经证明,MEC和WPT的集成可以显著提高计算性能[14-18]。然而,严重的传播损失可以显著降低收获的功率水平。最近,无人机支持的WPT架构已被提出,以向地面[19–22]上的设备提供无线能源。由于快速部署和高质量的视线(LoS)能量收集链路,它可以带来许多新的好处,相比于地面移动WPT充电器。
为了释放由无人机支持的无线动力MEC系统的潜力,[23–28]的几项工作一直专注于不同场景下的计算卸载和轨迹调度。然而,大多数的方法[24–26]都是建立在one-shot优化的基础上的,由于环境高度动态,优化问题需要频繁地重新审视,导致难以保证长期性能。事实上,大量的计算密集型任务可以随时通过无人机卸载给MEC。任务模式和规模都难以预测。此外,[23–26]现有的工作大多关注无人机无线驱动MEC系统的纯能耗或延迟性能,而能源效率(EE)和服务排队延迟之间的平衡权衡尚未得到很好的探索。实际上,EE和延迟是受无线信道条件显著影响的两个相关的性能指标,例如,当信道条件较差时,延迟能量转移和任务卸载可以提高EE性能,但会导致更长的排队延迟。此外,UAV和MIDs(Mobile Internet Devices)之间的信道条件由无人机位置决定,无人机位置由无人机轨迹控制。因此,通过设计一个低复杂度的在线无人机无线供电MEC系统中的计算和轨迹算法来平衡EE和延迟是很重要的。
基于上述问题,本文提出了一种用于 无人机支持的无线供电移动边缘计算系统 的联合在线计算和轨迹调度方案。我们首先 通过考虑随机任务到达和动态通道条件 制定EE最小化问题 来 平衡EE和服务排队延迟,然后提出一个在线算法通过联合优化计算资源分配和轨迹调度无人机支持的无线供电MEC系统来解决这个问题。本文的主要贡献总结如下:
- 我们开发了一个随机无人机支持的无线供电MEC系统,其中一个无人机被部署来协助任务卸载,并为地面设备提供能源供应。
- 在设备和无人机的任务队列稳定性,各MID最大cpu周期频率和发射功率,能量因果关系以及无人机的轨迹调度的约束下,提出了一个优化长期平均网络EE的随机优化问题。
- 为了有效地解决所提出的EE-延迟权衡问题,利用李亚普诺夫优化方法,提出了一种低复杂度的在线计算卸载和轨迹调度算法(OCOTSA)。
- 仿真结果表明,所提出的OCOTSA算法可以通过调整控制参数V来平衡EE和服务延迟,并且该OCOTSA算法的MEC系统性能优于基准算法。
论文的其余部分组织如下。第二节讨论了相关的工作。第三节介绍了系统模型。第四节给出了平均长期EE最小化问题。在第五节中,给出了该系统的在线计算卸载和轨迹调度算法。仿真结果见第六节。最后,我们在第七节中总结了该论文。
2.相关工作
许多研究已经研究了如何在MEC网络中使用无人机,以提高在有限或没有基础设施的情况下的覆盖范围[8-10,29]。在[8]中,作者研究了部分计算卸载模式下的计算效率最大化问题,其中共同优化了卸载时间、功率控制和轨迹。在[9]中,作者提出了一个固定翼无人机推进能耗作为无人机飞行速度和加速度的理论模型。利用[29],通过联合优化用户关联、功率控制、计算容量分配和位置规划,提出了具有延迟和覆盖约束的总功率最小化问题。[10]的作者研究了在无人机支持的MEC系统中的三层在线数据处理。利用李雅普诺夫优化算法和深度强化学习算法,分别提出了一种在线边缘处理算法和一种在线路径规划算法。然而,这些工作并没有考虑到设备有限的电池能量,也没有考虑到能量收集技术。
近年来,[24–26]作者研究了在无人机驱动的MEC系统中,利用WPT技术实现能量采集的资源调度问题。杜·等人。在[24]中,提出了一个基于TDMA工作流模型的无人机总能耗最小化的问题,并提出了一种解决该问题的替代算法。卢等人在[25]中,考虑了无人机辅助无线动力协同MEC系统中的“double near-far”效应,研究了时延约束和任务大小约束下的功率优化问题。
“Double near-far” effect 在无人机(UAV)辅助的通信系统中可能指的是两个相对独特的 “near-far” 问题,这两个问题在无人机辅助的无线通信中可能更为突出。
传统的 Near-Far 问题: 在无线通信中,这个问题描述了远离基站或接收器的用户因为信号衰减而需要更大的传输功率,以确保其信号可以被正确接收。而离接收器近的用户由于距离较短,可能只需要较小的传输功率。如果没有适当的功率控制机制,远离接收器的用户可能会因为其高的传输功率而干扰到其他用户。
高度引起的 Near-Far 问题: 在无人机辅助的无线通信中,UAV的高度和其与地面用户或其他无人机的相对位置会引入另一个维度的 “near-far” 问题。由于无人机可能会在不同的高度上运行,这会导致不同的信号传播特性和衰减,从而引起新的功率优化和分配的挑战。
结合上述背景,“double near-far” effect 可能是指这两种 “near-far” 问题的叠加,它们在无人机辅助的无线供电合作移动边缘计算(MEC)系统中可能会同时出现,导致功率优化和分配变得更为复杂。为了深入了解这个效应及其影响,建议详细阅读提到的文献[25]。
刘等人在[26]中,研究了一个无人机支持的无线动力合作MEC系统,该系统中的设备在无人机和邻近的空闲设备的帮助下完成计算任务。提出了一种基于连续凸逼近(SCA)的算法,通过联合优化CPU频率、卸载量、发射功率和无人机轨迹来最小化无人机能耗。然而,上述工作[24–26]的方法是建立在一个短优化的基础上,在无人机支持的WPT MEC系统中没有探索一段时间的任务流。[23]最近的工作研究了动态环境下的空间-空气-地面网络,并利用李亚普诺夫优化方法设计了一个在线算法,以最大化长期时间平均的系统计算率。与现有的研究不同,我们开发了一种在线资源分配和轨迹调度方案,并探讨了EE和服务排队延迟之间的权衡。本文通过建立随机优化框架和设计相应的算法来实现无人机辅助无线动力MEC系统的网络EE最小化,填补了这一空白。
3.系统模型
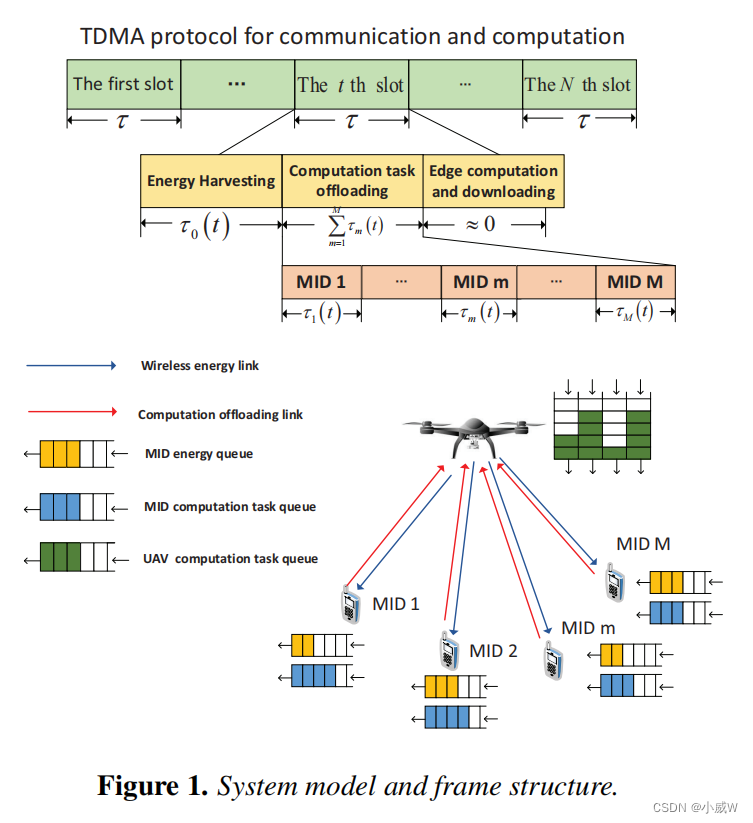
如图1所示,一个用于M个MIDs的无人机支持的无线供电MEC系统被考虑,其中无线电频率能量发射机和MEC服务器安装在无人机提供计算卸载服务和能源供应管理,例如,无人机传输能量并且每个MID实现从功率发射机能量收集。在军事和民用应用中,如救灾、监测区域的火灾报警等,采用WPT的无人机辅助MEC系统可以为MIDs提供灵活的部署和稳定的能量补充,特别是在常规通信系统被破坏时。
每个MID还可以将一些计算任务卸载给无人机进行远程处理,而其余的任务则在本地处理。与工作[20,23,29]类似,我们假设MIDs可以执行能量收集、本地计算和无线卸载。无人机可以同时处理任务计算和能量传输。无人机的任务是从指定的初始位置飞行到最终位置。在飞行期间,它为MIDs提供WPT和数据处理服务。考虑到一个三维笛卡尔坐标系,MIDs分布在地面上,即每个MID的海拔高度为零,MID m的位置可以记为qm =(xm,ym),m∈M。假设无人机在固定高度h处飞行。无人机在t处的水平坐标记为qc (t) =(xc (t),yc (t))。设任务完成时间为T,离散为N个等时隙。每个时隙的长度为τ = T /N。我们假设τ足够小,使得无人机的位置在每个时隙中近似不变。为方便起见,我们将MIDs的集合和时隙分别表示为M∆={1,2,…,M}和T∆={1,2,…,N}。
如图1中的框架结构所示,每个时隙持续时间进一步分为三个阶段,即能量收集、任务卸载和边缘计算/下载。在能量收集阶段,每个MID首先接收由能量发射机从无人机射频传输的能量,能量收集的持续时间用τ0(t)表示。在卸载阶段,为了消除mid之间的干扰,采用了TDMA方案。卸载阶段进一步分为M个小时间,每个时间分配给一个MID进行卸载。τm (t)的占用时间表示MID m在t、m∈m、t∈t下的卸载时间。MEC计算和任务下载的时间可以忽略不计和省略,因为无人机有比MIDs更强的计算能力,并且计算结果的大小是相对较小的[14,19]。
采用块衰落信道模型,即信道在每个时隙t期间保持静态,但随着时隙的变化而变化。假设无人机和MIDs之间的无线信道以LoS链路[9,29]为主。因此,在MID m和无人机之间给出为信道功率增益为

其中,g0为参考距离为d0 = 1m处的信道功率增益。dm (t)表示MID m与无人机在时隙t处的欧氏距离。∥·∥表示欧几里得范数。
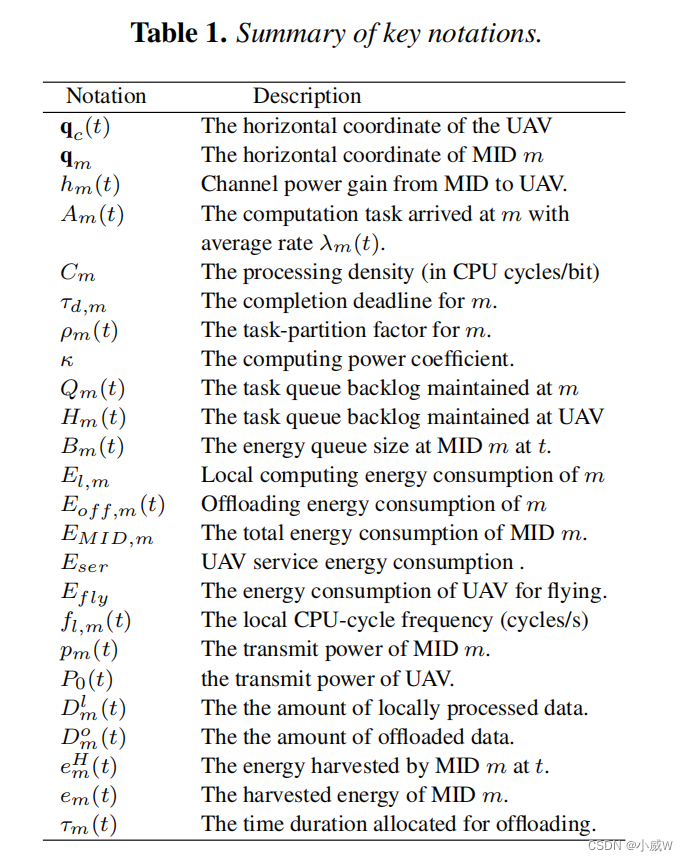
为了便于参考,我们在表1中列出了我们的系统模型的关键符号。
3.1 任务队列模型
设Am (t)表示在t期间到达MID m的计算任务位。为了获取网络的动态,我们假设Am (t)∈[0,Am,max]在不同的时间点是独立同分布的(i.i.d),平均速率为λm (t) [14,30]。每个MID都有一个缓冲区来存储和处理到达任务。
设Qm (t)为时间槽t中在MID m维护的任务队列积压,其中Qm (0) = 0。在t时,Dl、m(t)位由MID m处理,而Do、m(t)位被卸载到无人机启用的MEC。因此,
Q
m
(
t
)
Q_m (t)
Qm(t)的演化方程表示为

其中,
[
a
]
+
=
m
a
x
(
a
,
0
)
[a]^+ = max(a,0)
[a]+=max(a,0)。
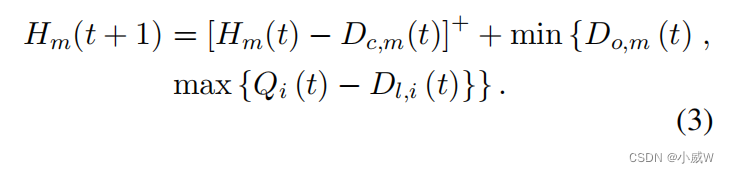
假设无人机上的MEC服务器有M个类似的大容量并行缓冲区来存储从每个MID接收到的任务。设Dc,m (t)为MEC服务器在时隙t中为MID m处理的位,假设为一个最大值Dc为最大[31]的随机数。同样,在UAV维护的用于MID m的任务队列积压
H
m
(
t
)
H_m (t)
Hm(t)应满足以下更新过程:
3.2 本地计算
在每个MID上,本地计算与任务卸载同时执行。设Cm表示处理密度,即处理一位任务所需的cpu频率循环数。通过调整每个时隙中的CPU频率,本地计算所消耗的能量可以被自适应控制[19]。设 f l , m ( t ) ≤ f l , m a x f_{l,m} (t)≤f_{l,max} fl,m(t)≤fl,max表示 t 中MID m的CPU频率,以每秒周期为单位,fl,max为每个MID的最大计算能力。在时隙 t 中本地计算的总数表示为

相应的能耗表示为

其中,
κ
κ
κ 为由CPU硬件结构[19]决定的有效开关电容系数。
3.3 基于TDMA(时分多址接入)的任务卸载
设W为通信带宽。MID m在 t 处的发射功率记为
P
m
(
t
)
P_m (t)
Pm(t)。
σ
2
σ^2
σ2 表示噪声功率,
v
m
v_m
vm 表示任务卸载期间的通信开销。分配给MID m的卸载时间为
τ
m
(
t
)
τ_m (t)
τm(t),根据香农-哈特利公式,从MID m到UAV的数据量
D
o
,
m
(
t
)
D_{o,m}(t)
Do,m(t) 给出为
基于以上描述,我们只需要考虑能量收集时间和卸载时间。所有MIDs进行能量收集和卸载的总时间不能超过一个时间段,即:
设
E
o
f
f
,
m
(
t
)
E_{off,m} (t)
Eoff,m(t)表示MID m在时间段t中的卸载能耗。我们有

3.4 Energy Queuing Model 能量排队模型
MID收集的能量用于局部计算和任务卸载[13,14,19]。无人机在
τ
0
(
t
)
τ_0(t)
τ0(t) 范围内向MIDs发送能量信号。在线性能量收集模型中,MID m在时隙 t 中收集的能量为

其中,
η
m
∈
(
0
,
1
]
η_m∈(0,1]
ηm∈(0,1] 为MID m 能量收集时的效率,P0(t)为无人机发射功率。设Bm (t)表示时隙t中MID m处的能量队列大小。它的动力学可以用以下方程式捕捉得到:

式中, E M I D , m ( t ) = E l , m ( t ) + E o f f , m ( t ) E_{MID,m} (t) = E_{l,m} (t) + E_{of f,m} (t) EMID,m(t)=El,m(t)+Eoff,m(t) 为时隙 t 中MID m的总能耗。
时隙 t 中MID m的能耗不能超过其电池中存储的可用能量,即:

3.5 无人机能耗
(1)UAV service energy consumption 无人机服务能耗
无人机服务能耗
E
s
e
r
E_ser
Eser 包括两部分,一个用于能量收集,一个用于卸载任务计算[14]。由于MEC服务器通常具有强大的计算能力,所以我们只关注的第一部分是无人机所消耗的服务能量。因此,无人机的服务能源消耗被表示为
无人机消耗的 - MID收集的 ?
(2)UAV flying energy consumption 无人机飞行能耗
与现有的研究[25–27]类似,我们假设无人机在每个时隙内以恒定的速度沿直线飞行。由于恒高飞行不影响重力势能的消耗,因此将速度v (t)定义为无人机的水平距离增量与时隙长度的比值,表示为

因此,飞行的能耗可以表示为

其中,
k
f
=
M
g
τ
2
k_f = \frac{M_gτ}{2}
kf=2Mgτ ,
M
g
M_g
Mg 代表无人机的质量。
4.PROBLEM FORMULATION 问题定式化
4.1 Average EE Minimization Problem
在本节中,我们的目标是最小化无人机启用的无线动力MEC系统的长期平均EE,并根据无人机的资源分配、网络稳定性、能量因果关系和飞行轨迹进行调整。
根据以上讨论,可处理的计算任务总数为

其中,第一项为本地计算量,第二项为卸载量。
总能耗包括MIDs的计算能量和卸载能量,以及无人机在时隙t处的通信能量和飞行能量,表示为
式中,ws 和 wc 为 MID 和无人机能耗的权重因子,ws + wc = 1。γ为飞行能量惩罚系数,旨在缓解振幅的差异。
我们将系统EE定义为系统的长期总能耗与相应的长期聚合处理计算任务的比值,即:
其中,
E
ˉ
T
O
T
\bar{E}_{TOT}
EˉTOT 和
∑
m
=
1
M
D
ˉ
m
T
O
T
\sum^M_{m=1} \bar{D}^{TOT}_m
∑m=1MDˉmTOT 分别表示
E
T
O
T
(
t
)
E_{TOT} (t)
ETOT(t) 和
∑
m
=
1
M
D
m
T
O
T
(
t
)
\sum^M_{m=1}D_m^{TOT} (t)
∑m=1MDmTOT(t) 的时间平均期望的极限。
请注意,现有作品[32,33]中对EE的共同定义是基于瞬时视角的。在这里,我们从长期时间平均的角度来定义EE,基于它可以反映执行一比特任务的平均能量消耗。类似的EE的定义也可以在[14,34]中找到。
时隙 t 中优化的参数向量定义为 X ( t ) = { f l , m ( t ) , P m ( t ) , τ m ( t ) , q c ( t ) } X(t)=\{f_{l,m}(t),P_m (t),τ_m (t),q_c (t)\} X(t)={fl,m(t),Pm(t),τm(t),qc(t)}。然后,长期平均EE最小化问题可以表述为
{本地cpu-cycle frequency,MID m的传输功率,用于卸载的时间分配,无人机的水平坐标}
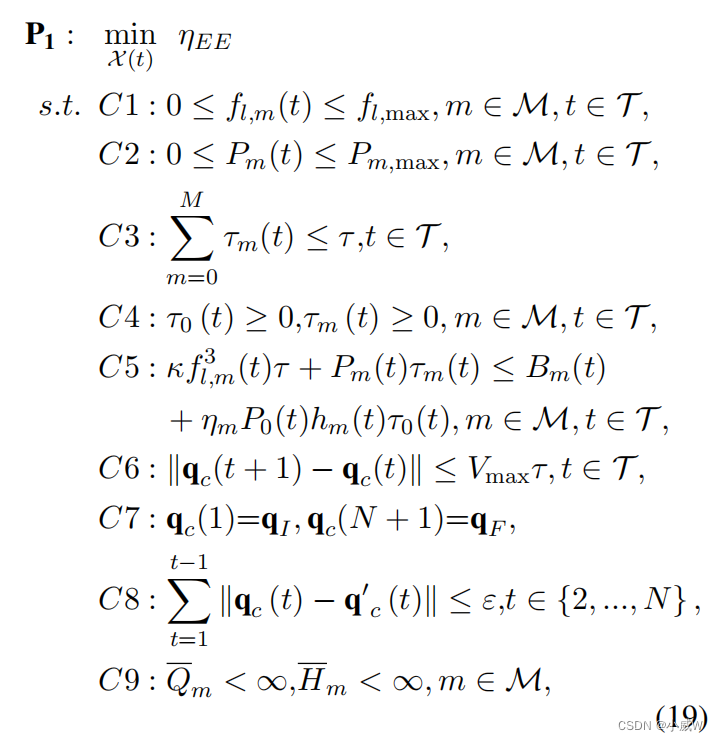
上述约束条件可以解释如下。C1和C2分别是MIDs的本地cpu周期频率和功率约束。C3是能量收集和任务卸载总时间不能超过一个时间隙的时间约束。c4表示时间约束。C5表示每个MID的总能耗不能超过电池中的可用能量。C6为无人机飞行速度的范围。C7为无人机的初始位置和最终位置。C8表示无人机轨迹的历史不能被修改,其中qc’(t)为在前一个时间段获得的无人机轨迹。C9保证了任务队列的稳定性。
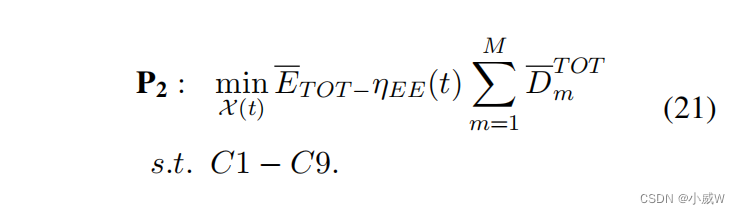
根据分数规划[35,36]的基本结果,当且仅当 E ˉ T O T − η E E o p t ∑ m = 1 M D ˉ m T O T = 0 \bar{E}^{TOT}−η_{EE}^{opt}\sum_{m=1}^M \bar{D}_m^{TOT}=0 EˉTOT−ηEEopt∑m=1MDˉmTOT=0时,得到P1的最优网络EE。因此,P1可以转换为一个等价的线性分数式规划,如最小 E ˉ T O T − η E E o p t ∑ m = 1 M D ˉ m = 1 M D ˉ m T O T \bar{E}^{TOT}−η^{opt}_{EE} \sum^M_{m=1} \bar{D}_{m=1}^M \bar{D}^{TOT}_m EˉTOT−ηEEopt∑m=1MDˉm=1MDˉmTOT。
由于
η
E
E
o
p
t
η^{opt}_{EE}
ηEEopt 的值是未知的,我们引入t∈{1,2,3,…}的变量
η
E
E
(
t
)
η_{EE}(t)
ηEE(t),使用
η
E
E
(
0
)
=
0
η_{EE}(0) = 0
ηEE(0)=0,定义为

从ηEE (t)的定义中,我们可以发现ηEE (t)的值取决于t之前过去的资源分配策略,与
η
E
E
o
p
t
η^{opt}_{EE}
ηEEopt 相比,这是一个已知的参数。
通过将最小化
E
ˉ
T
O
T
−
η
E
E
o
p
t
∑
m
=
1
M
D
ˉ
m
T
O
T
\bar{E}^{TOT}−η_{EE}^{opt}\sum_{m=1}^M\bar{D}_m^{TOT}
EˉTOT−ηEEopt∑m=1MDˉmTOT 中的
η
E
E
η_{EE}
ηEE 替换为
η
E
E
o
p
t
(
T
)
η_{EE}^{opt}(T)
ηEEopt(T),我们将原始的最小化问题P1重新表述为P2:
4.2 Lyapunov Optimization
本节提出了一种基于李亚普诺夫优化理论的在线算法来求解随机优化问题P2。通过保持任务队列的稳定,实现了排队延迟和EE之间的平衡。首先,我们将李亚普诺夫函数定义如下:
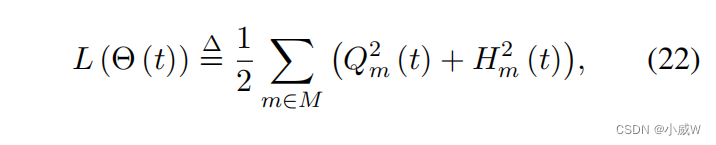
其中,
Θ
(
t
)
=
{
Q
(
t
)
,
H
(
t
)
}
Θ(t) = \{Q (t),H (t)\}
Θ(t)={Q(t),H(t)} 表示在时隙 t 的所有任务队列的当前积压。我们进一步介绍了一步条件李雅普诺夫漂移函数如下。

通过合并队列稳定性,我们将李雅普诺夫漂移加惩罚函数[37]定义为
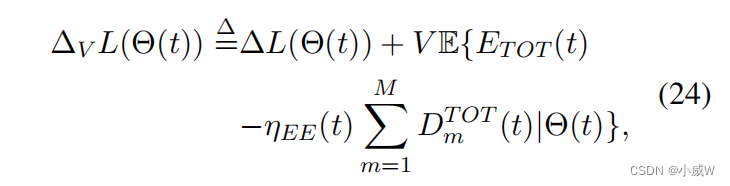
其中V是一个非负权值常数,表示队列稳定性和系统效用之间的权衡。
我们不可以直接最小化 ∆ V L ( Θ ( t ) ) ∆_VL(Θ(t)) ∆VL(Θ(t)),而是可以最小化它的上界,并且仍然可以得到接近最优的系统EE。以下引理给出了任何行为 X ( t ) X(t) X(t) 下的 ∆ V L ( Θ ( t ) ) ∆_VL(Θ(t)) ∆VL(Θ(t)) 的上界。
Lemma 1
对于任意的队列积压,漂移加惩罚函数的上界可以推导出为
其中 C 是一个常数。
证明。请参考附录。
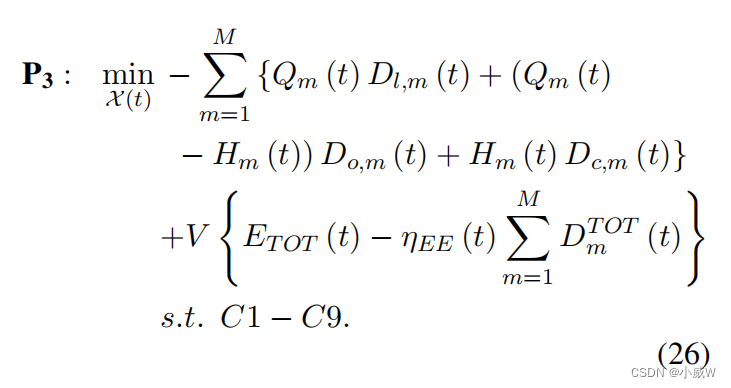
基于引理1,将原问题转化为一系列每时隙优化问题P3,它只需要当前队列长度和控制参数的信息,给出为
5. ONLINE ALGORITHM FOR COMPUTATION OFFLOADING AND TRAJECTORY SCHEDULING
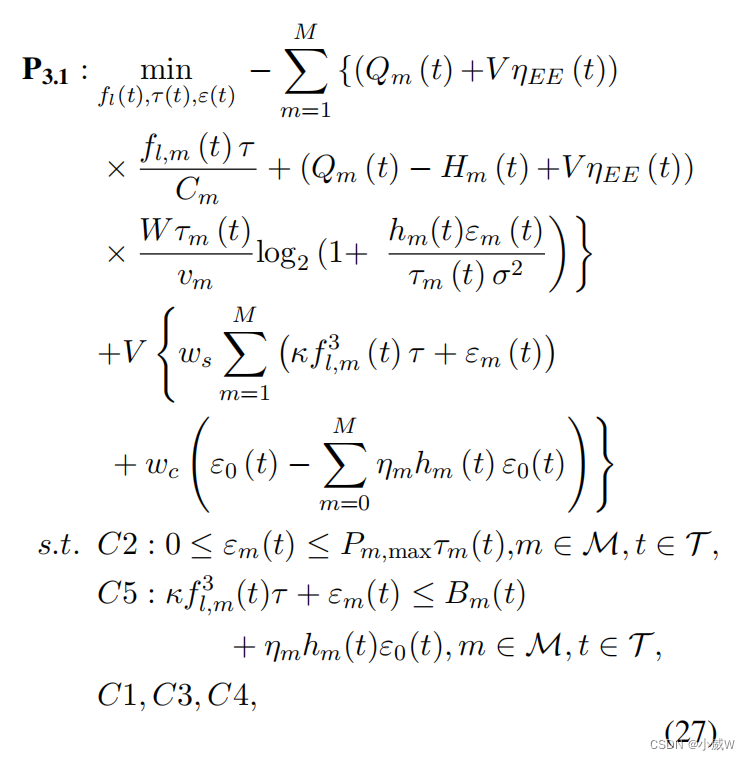
由于优化变量与轨迹非凸部分的耦合,问题P3仍然是一个非凸优化问题。本节将问题P3解耦为两个子问题,提出了一种有效的计算和轨迹调度的在线算法。针对不同的最优变量,建立了这两个子问题:1) P3.1旨在找到最优的CPU周期频率、传输功率和时间分配;2) P3.2旨在实现无人机的最优轨迹调度。
5.1 Optimal CPU-Cycle Frequency, Transmit Power and Time Allocation 最优的cpu-周期频率、传输功率和时间分配
通过引入一组辅助变量,让
ε
m
(
t
)
=
P
m
(
t
)
τ
m
(
t
)
,
m
=
0
,
1
,
2
,
.
.
.
,
M
ε_m (t) = P_m (t) τ_m (t),m = 0,1,2,...,\mathcal{M}
εm(t)=Pm(t)τm(t),m=0,1,2,...,M。给定无人机飞行轨迹q_c(t),MID的最优CPU周期频率
f
l
,
m
o
p
t
(
t
)
f_{l,m}^{opt}(t)
fl,mopt(t),传输能量
ε
m
o
p
t
(
t
)
ε_m^{opt}(t)
εmopt(t) 和时间分配
τ
(
t
)
τ(t)
τ(t) 可以通过解决问题P3.1。
考虑到只有
Q
m
(
t
)
Q_m(t)
Qm(t) 中的部分任务被卸载到无人机缓冲队列
H
m
(
t
)
H_m (t)
Hm(t),并且假设边缘服务器总是具有强大的处理能力,一个服务器总是有
Q
m
(
t
)
−
H
m
(
t
)
+
V
η
E
E
(
t
)
≥
0
Q_m (t)−H_m (t) + V η_{EE} (t )≥ 0
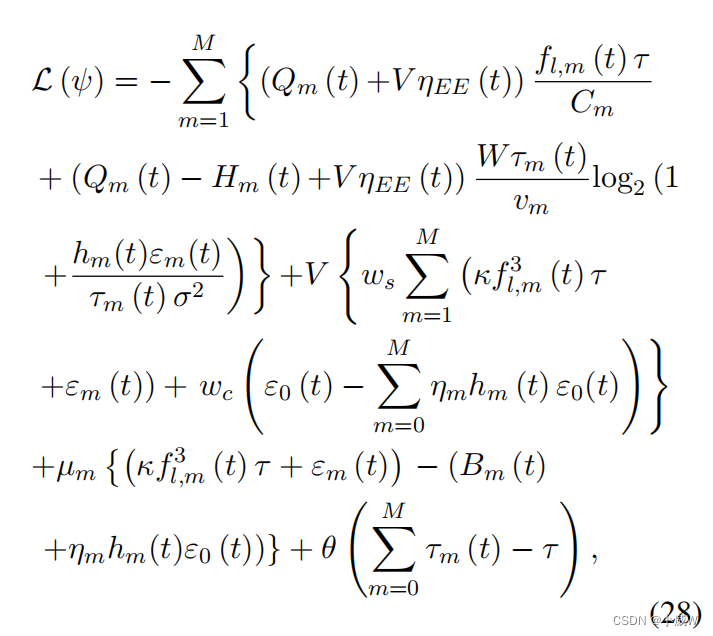
Qm(t)−Hm(t)+VηEE(t)≥0。它可以很容易地证明问题P3.1是凸的,并可以使用拉格朗日对偶性方法来求解它[38]。具体步骤如下。
5.1.1 Lagrange duality decomposition method 拉格朗日对偶性分解方法
在给定无人机飞行轨迹下,利用拉格朗日对偶性获得CPU周期频率和发射功率。P3.1中的拉格朗日函数,可以写成如下
其中,
µ
m
≥
0
µ_m≥0
µm≥0 和
θ
>
0
θ > 0
θ>0 分别表示与约束C5和C3相关的对偶变量。
ψ
ψ
ψ 表示P3.1中的变量集合。
定义P3.1的拉格朗日对偶问题为
(29)的拉格朗日对偶问题可以表示为
为了获得最优的功率控制,应满足P3.1的 Karush-Kuhn-Tucker(KKT)条件[39]。因此,令(28)对
f
l
,
m
(
t
)
f_{l,m}(t)
fl,m(t)和
ε
m
(
t
)
ε_m (t)
εm(t)的导数为零,可以得到
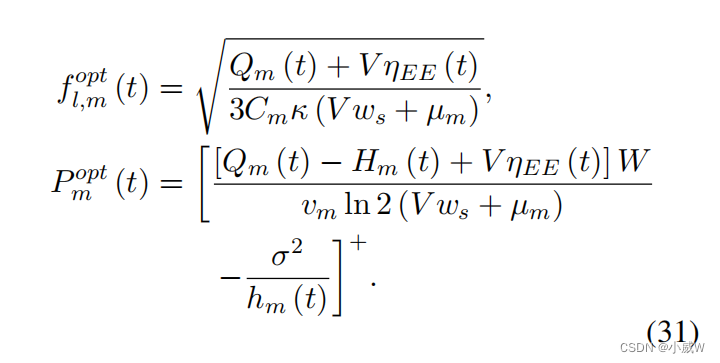
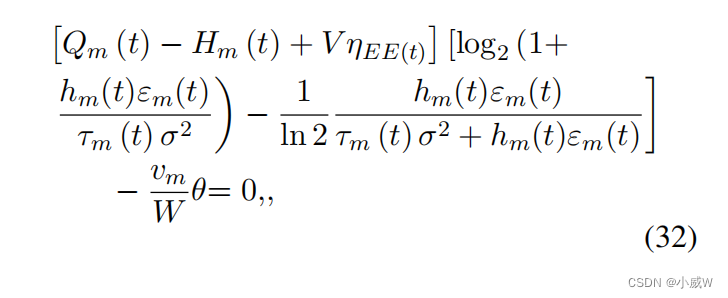
给定无人机轨迹
q
c
(
t
)
q_c (t)
qc(t),通过求解以下等式,可以得到最优的时间分配
5.1.2 The update of Lagrangian multiplies
在获得局部计算资源分配、传输功率和时间分配后,可以使用次梯度(sub-gradient)法来更新对偶变量,如引理2所示。
Lemma 2
采用以下次梯度法来更新对偶变量的值[19]。
5.2 Trajectory Scheduling of UAV 无人机的轨迹调度
对于给定的CPU频率、发射功率和时间分配,轨迹优化问题可以表述为P3.2
问题P3.2的目标包括飞行能量消耗和无线卸载能量消耗。这两个部分都受到无人机的位置和运动轨迹的影响。此外,轨迹调度还需要确定无人机在所有时隙[29]中飞行的位置。目标函数的后一部分是最小化所有时间段的飞行总能耗,而不是在一定时间段的飞行能耗。换句话说,通过解决问题P3.2问题,可以得到一个完整的无人机飞行轨迹。
请注意,C6和C8是凸二次约束,而C7是一个线性约束。由于C5是非凸的,所以问题P3.2是非凸的。当所得到的解满足P3.2 的Karush-Kuhn-Tucker(KKT)条件时,可以利用连续凸近似(SCA)技术来求解优化问题[9]。通过使用SCA技术,我们有了以下定理1。
Theorem 1
为了解决问题P3.2,我们引入了一个松弛变量
z
m
(
t
)
≥
0
,
m
∈
M
,
t
∈
T
z_m (t)≥0,m∈M,t∈T
zm(t)≥0,m∈M,t∈T,通过添加新的约束来处理非凸问题。

C5中的约束可以重写为
其中, H ^ m l , b ( { q c ( t ) } ) \hat{H}^{l,b}_m(\{q_c (t)\}) H^ml,b({qc(t)})是 1 H 2 + ∥ q c ( t ) − q m ∥ 2 \frac{1}{H^2+∥q_c(t)−q_m∥^2} H2+∥qc(t)−qm∥21的线性下界。对于任何局部轨迹 q c j ( t ) , t ∈ N q^j_c(t),t∈N qcj(t),t∈N 在第j次迭代时,有
因此,问题P3.2可以转换为P3.2.1。
P3.2.1是一个凸优化问题,可以用标准的凸优化方法[38]轻松地求解。
综上所述,提出了一种低复杂度的在线计算卸载和轨迹调度算法(OCOTSA)以算法1中总结的在线方式联合优化本地CPU周期频率、时间分配、功率控制和无人机轨迹调度。
6.SIMULATION RESULTS AND DISCUSSION 仿真结果及讨论
仿真设置是基于[24]和[29]中的工作。假设有 M = 4 个MIDs 在15m×15m范围内分布。每个MID的位置分别为:(0、0)、(0、15)、(15、15)、(15、0)。每个MID在每个时间段都有一个计算任务到达,到达任务大小Am (t)遵循 [ 0 , A m , m a x ] [0,A_{m,max}] [0,Am,max]内的均匀分布。无人机从初始位置 q I = [ 0 , 0 ] q_I = [0,0] qI=[0,0]飞行到最终位置 q F = [ 15 , 0 ] q_F = [15,0] qF=[15,0],在一个恒定的高度H = 10m。此外,无人机任务完成的总时间为T = 2s,分为N个= 50个时隙。模拟中使用的其余参数设置为 W = 1 M H z W = 1MHz W=1MHz、 g 0 = 1 0 − 2 g0=10^{−2} g0=10−2、 σ 2 = 1 0 − 9 W σ^2=10^{−9}W σ2=10−9W、 f l , m a x = 1 G H z f_{l,max}=1 GHz fl,max=1GHz, P m , m a x = 0.1 W P_{m,max}= 0.1W Pm,max=0.1W、 P 0 = 50 d B m P_0 = 50dBm P0=50dBm、 κ = 1 0 − 25 κ=10^{−25} κ=10−25、 C m = 1000 c y c l e / b i t s C_m=1000cycle/bits Cm=1000cycle/bits、 V m a x = 10 m / s V_{max}= 10m/s Vmax=10m/s、 M g = 9.65 k g M_g = 9.65kg Mg=9.65kg,除非另有说明。
6.1 Performance Analysis
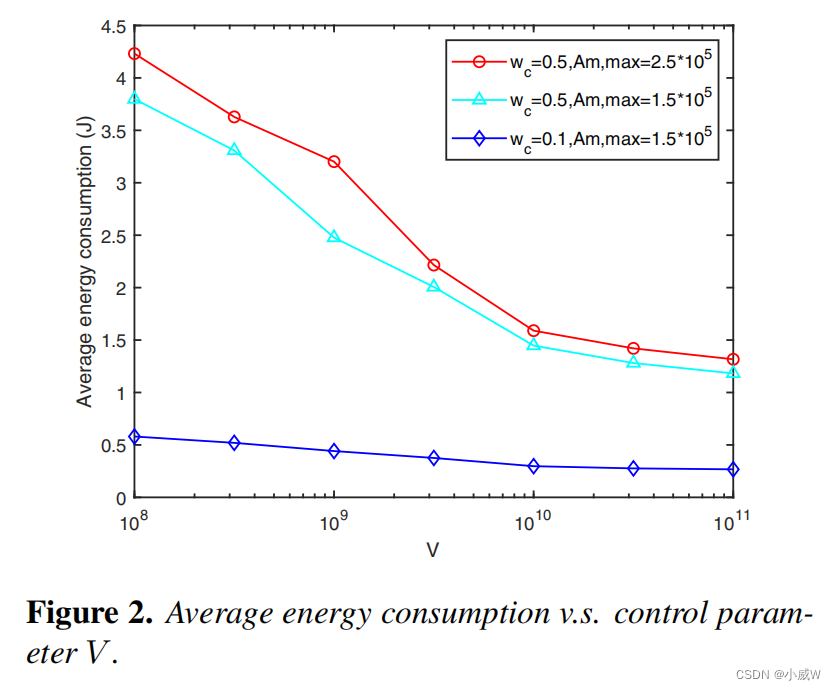
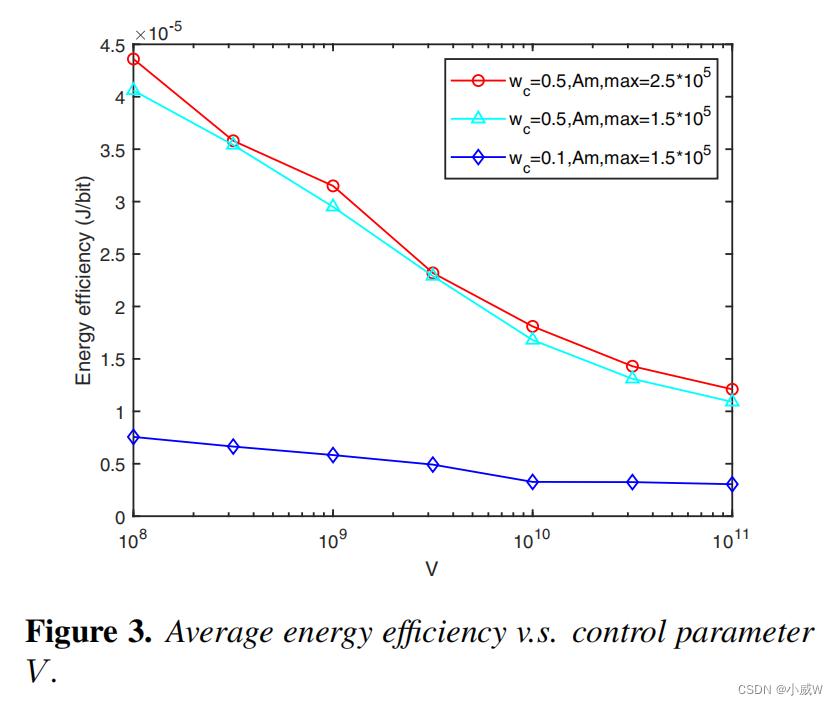
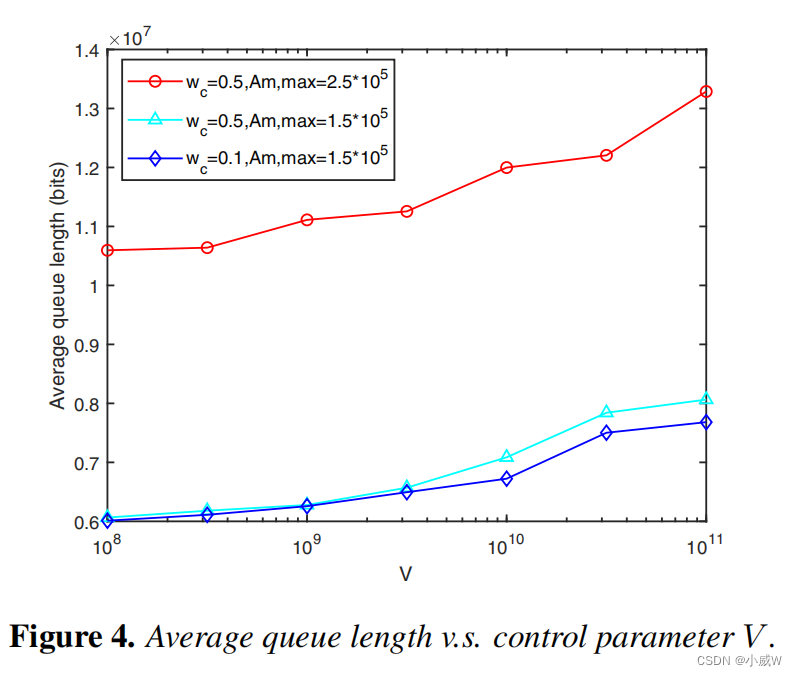
图2-4分别显示了系统的平均能耗、平均EE和平均队列长度 随控制参数 V 的变化情况。平均能耗随V的变化情况如图2所示。所有设置的平均系统能耗均随V的增加而减小。这是由于V值越大,导致系统的能量消耗越小,这可以从(26)中看出。此外,可以观察到平均能耗随着wc和Am的增加而增加。无人机的能耗远高于MID [29]的能耗。当wc增加时,无人机能耗的比例权重大大增加,而系统的可达率没有增加那么多,导致整体EE性能下降。此外,任务大小Am、max值较大,需要较高的任务处理率,以保持缓冲队列的稳定性。因此,能源消耗不可避免地也随之增加。
图3显示了平均EE和控制参数V之间的关系。从图中可以看出,系统的EE随V的增长而减小。原因是系统具有较大的EE优先级,符合(25)。由于无人机能耗幅度较大,wc的增长意味着系统能耗值显著增加,而处理数据量保持稳定,导致EE性能较差。由于更大的任务到达需要更多的处理资源来保持队列的稳定性,很明显,EE随着Am,max变得越来越糟。图4显示了控制参数V对平均队列长度的影响。很明显,平均队列长度随着V值的增加而增加,这进一步验证了参数V可以是一个在李雅普诺夫优化中,平衡EE和排队长度的控制因子。在给定的任务大小下,缓冲区队列的长度随着wc的增长而略有增加。其原因可以解释如下。wc越高,无人机的权重越高,MIDs的总能耗和相应的可达率越低,导致队列长度越长。
随着 A m , m a x A_{m,max} Am,max 的增加,平均队列长度也会增加。显然,Amam越大会导致平均队列长度显著增加。图3和图4的观察结果进一步表明,EE与平均队列长度之间存在一种权衡,即网络EE与平均队列长度呈负相关。因此,应根据不同的服务质量来选择控制参数V。
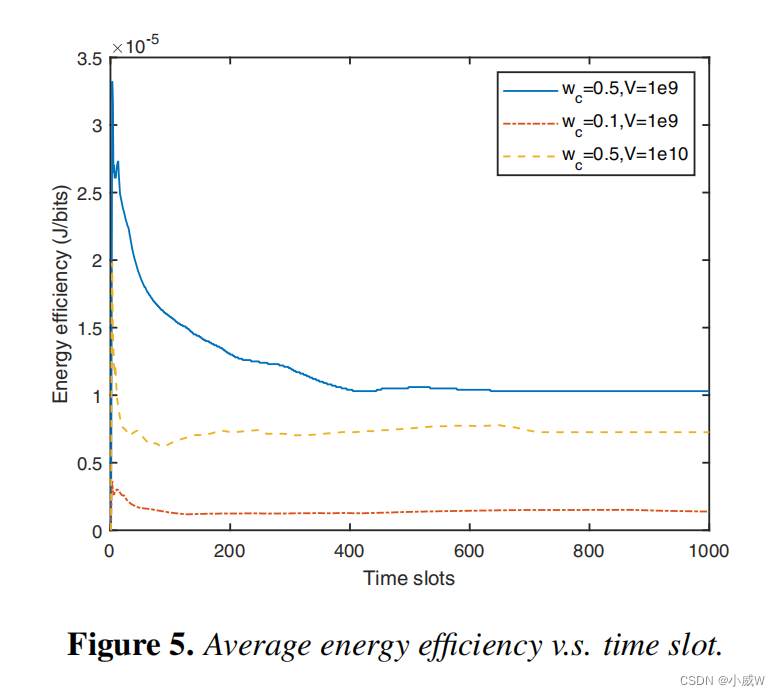
图5说明了在大时间尺度上的EE性能。可以看出,随着时隙数的增加,系统的EE缓慢减小,基于不同设置的算法最终收敛到稳定的性能。结果表明,V越大,系统可以实现较低的EE和较快的收敛速度。
6.2 Scheme Comparison 方案比较
本部分验证了该方法在最小化系统EE方面的优越性。控制参数设置为 V = 10^9。我们将我们提出的算法与以下三个基准测试方案进行了比较。
- 完成本地:所有的计算任务都是由 MIDs 在本地处理。因此,无人机将只作为能源供应,并使用与我们提出的方法相同的轨迹调度。
- 完全卸载: MIDs没有本地处理能力,需要将其所有的计算任务卸载到无人机上的MEC服务器上进行处理。轨迹调度方法与我们提出的方法相同。
- 不进行轨迹优化:无人机只应用初始轨迹,不采用任何轨迹优化策略。利用与本文提出的相同的资源分配算法,MIDs可以将其任务部分卸载给无人机。
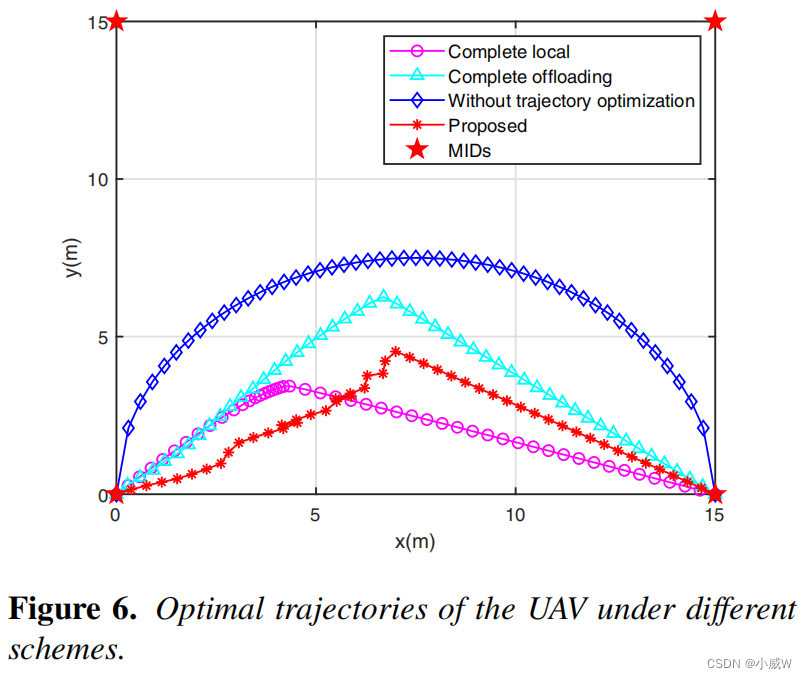
图6显示了不同方案下的轨迹调度情况。MID首先接收从无人机传输的能量,然后将部分任务转移给无人机处理。因此,无人机需要尽可能接近每个MID。此外,由于无人机的能耗随着飞行距离的增加而增加,无人机需要优化其飞行轨迹,以节省更多的能量,并保证各MID的性能。“完全本地”方法的飞行距离较低,因为无人机只需要传输能量,而不需要等待卸载数据。与其他两个基准测试相比,该方法的距离较低,因为它可以找到在不同MIDs下的能量收集和任务卸载之间的最优权衡。“完全卸载”方法有更高的距离,因为MID不能执行本地计算,无人机必须飞得更远,等待所有MID卸载的所有任务。
图7-9显示了系统性能与最大到达任务Am,max。
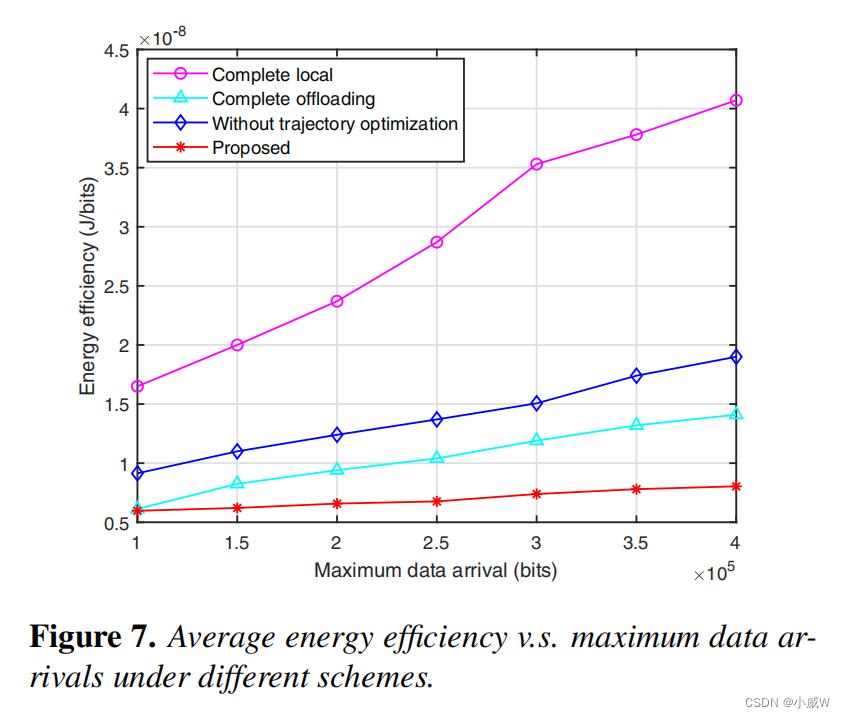
图7描述了 Am,max 对系统平均EE的影响。从图中可以看出,所有的曲线都随着最大到达数据的增加而增加。原因是更多的任务到达需要更大的处理速率和更多的能耗来保持缓冲队列长度在一个稳定的水平,从而导致EE的性能更差。与其他基准测试相比,该方法可以获得最佳的EEE。由于MIDs的计算能力和能量供应有限,“完全本地”方法的EE性能最差。这也表明,部署一个基于无人机的MEC服务器可以显著提高系统的性能。另一件值得注意的事情是,不同方法之间的差距随着Am,max的变化而增大。原因是当任务规模较低时,所有的方法都能很容易地满足处理需求,并保持较高的EE。然而,当任务规模不断增加时,基准测试必须牺牲他们的EE来保持系统的稳定。但该方法仍然保持了更好的无人机延迟权衡,因为它可以利用局部计算和任务卸载的所有好处。
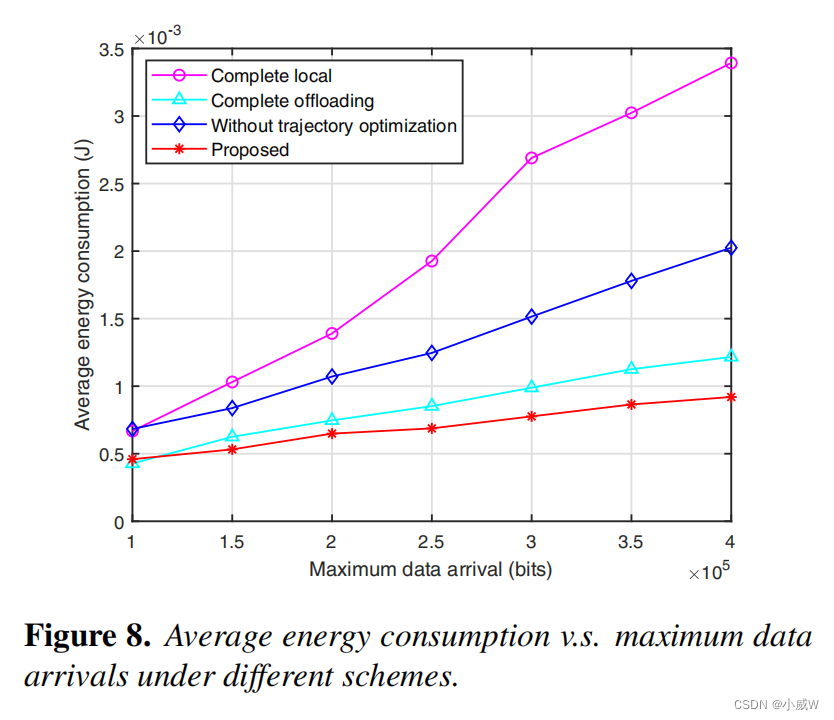
图8显示了平均能耗与Am,max的对比。所有方法的能量消耗都随着到达任务的大小而不断增加,这与图7中的观察结果相似。与其他基准测试相比,提出的方法可以达到最低的能耗。值得注意的是,当Am、max较小时,“完全本地”方法的能耗接近于其他方法,但MIDs有限的局部计算速度使得可达率和相应的EE低于其他基准。需要注意的是,虽然一开始所提出的方法的能耗略高于“完全卸载”,但可达率和EE比该方法好得多,验证了所提出的方法可以实现更好的EE折衷。
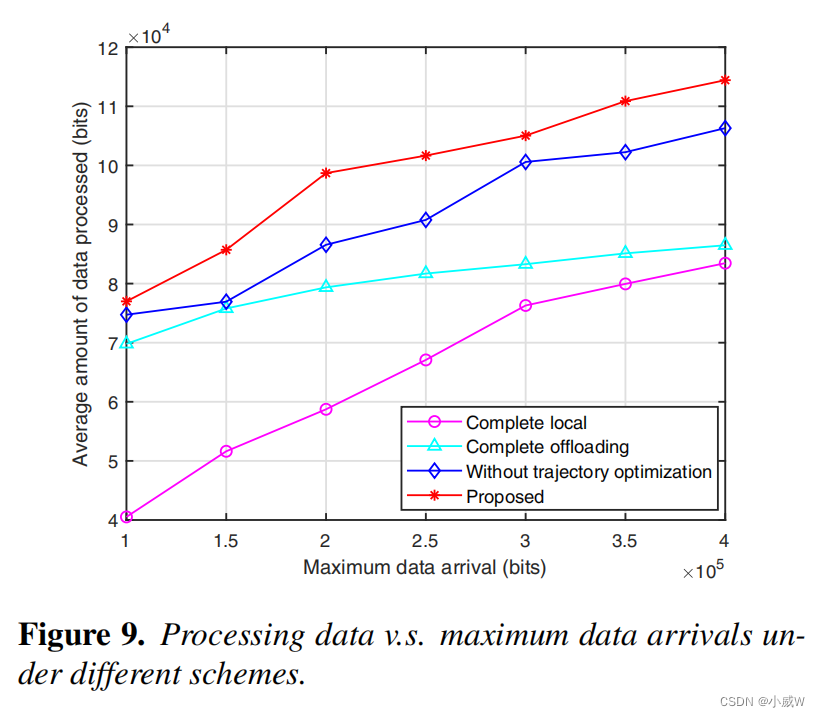
处理数据的平均量与最大到达数据Am,max如图9所示。曲线的变化趋势与图7和图8相似,验证了上述观察结果。该方法可以获得最大的处理数据量。“无轨迹优化”、“完全卸载”和“完全本地”方法的性能按降序排列。这背后的原因是,基于我们的设置,无人机的部署可以显著帮助系统提高处理能力和EE,即使没有轨迹优化。然而,由于无人机飞行消耗更多的功率,“无轨迹优化”方法的EE性能比“完全卸载”方法更差。“完全本地”和“完全卸载”方法所获得的平均处理数据量低于其他方法。这是因为它们都不能根据环境的动态变化自适应地调整最优任务分配。因此,基于以上讨论,所提出的无人机支持方法有助于提高系统性能。
7. 结论
本文结合随机任务生成和无线信道环境,研究了无人机无线功率MEC系统中的CPU周期频率、功率控制、时间分配和无人机轨迹调度。给出了具有队列稳定性约束的时间平均网络EE最小化问题。为了求解非凸问题,利用一种基于李雅普诺夫优化的优化算法,将目标问题分解为两个可管理的子问题。仿真结果验证了EE与服务队列延迟和版本之间的权衡并验证了该算法得到的EE性能优于其他基准方案。
附录
不等式
(
m
a
x
[
a
−
b
,
0
]
+
c
)
2
≤
a
2
+
b
2
+
c
2
+
2
a
(
c
−
b
),
∀
a
,
b
,
c
≥
0
(max [a−b,0] + c)^2≤a^2 +b^2 +c^2 + 2a(c−b),∀a,b,c≥0
(max[a−b,0]+c)2≤a2+b2+c2+2a(c−b),∀a,b,c≥0始终成立。通过将上述不等式应用于(2)和(3),我们可以得到
因此,当前时隙中的李雅普诺夫函数与前一个时隙之间的差值可以通过
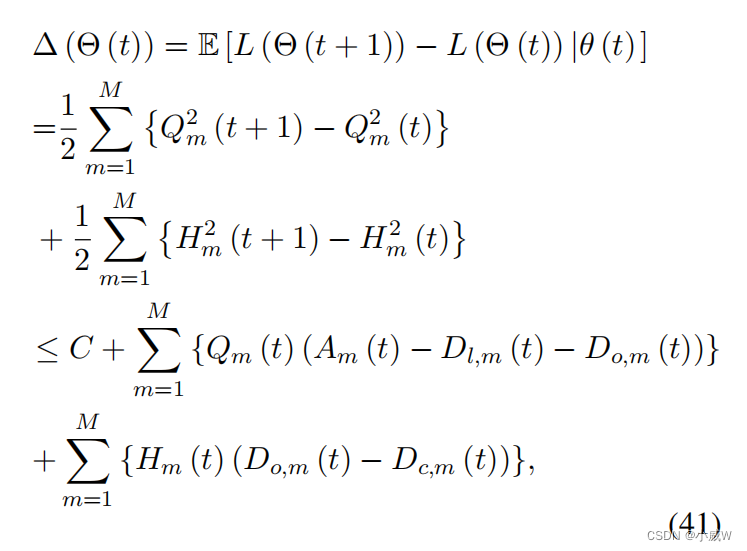
其中,C为一个常数,并被定义为
式中,
A
m
、
m
a
x
(
t
)
Am、max (t)
Am、max(t)、
D
l
、
m
a
x
(
t
)
Dl、max (t)
Dl、max(t)和
D
o
、
m
a
x
(
t
)
Do、max (t)
Do、max(t)分别为
A
m
(
t
)
Am (t)
Am(t)、
D
l
、
m
(
t
)
Dl、m(t)
Dl、m(t)和
D
o
、
m
(
t
)
Do、m(t)
Do、m(t)的上界。因此,李雅普诺夫漂移加惩罚函数的上界可以给为:

















 14万+
14万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











