







论文基本信息
《An AUV-Assisted Data Gathering Scheme Based on Clustering and Matrix Completion for Smart Ocean》
《基于聚类和矩阵完成的AUV辅助数据采集方案》
IEEE INTERNET OF THINGS JOURNAL, VOL. 7, NO. 10, OCTOBER 2020
摘要
海洋覆盖了地球表面的71%以上,数据量激增。寻求能源有效、超可靠的通信传输机制,对有效收集丰富的海洋数据具有重要意义。本文提出了一种基于聚类和矩阵补全(ACMC)的自主水下航行器(AUV)辅助数据采集方案,以提高水下无线传感器网络(UWSN)的数据采集效率。具体来说,我们首先改进了K-means算法,采用肘部方法来确定最优K,并设置一个距离阈值来选择单独的初始聚类中心。然后,我们引入了一种两相的AUV轨迹优化机制,有效地减小了AUV的轨迹长度。第一阶段采用贪心算法规划AUV的优化轨迹。在第二阶段,选择靠近AUV轨迹的普通节点作为辅助集群头,共享集群头的工作负载。最后,我们提出了一种基于矩阵补全的簇内数据收集机制。一个广泛的实验验证了我们提出的方案在能量和数据收集延迟方面的有效性。
1.引言
占地球表面71%以上的海洋包含了大量的数据和信息,这些数据资源由不同的海洋终端[1]收集。水下无线传感器网络(UWSN)中最常用的海上终端之一是传感设备(如传感器节点)[1]、[2]。这些传感设备被部署在不同的区域,以监测各种物理现象,如声音、振动和图像[1]、[3]、[4]。因为它能够获取监测数据,所以它一直是许多应用[5]–[10],包括环境监测[11]–[13],海洋利用和勘探[14],[15],社交网络[16],[17],和应用工商[18],[19],例如,持续监测鱼,潮汐和洋流,以及敌舰探测在军事防御[13],[20],等。由于[7]、[21]的低价格,传感器节点被广泛地部署在各种海洋环境中,以获取宝贵的数据。有效的传输控制在具有固有拓扑动力学和不可靠链路条件[22]的水下网络中是一个复杂的问题。因此,对收集海洋数据的高效、超可靠机制的需求迅速增长,已成为[23]的研究热点。
虽然关于海洋数据收集的研究相当多,但从这些研究中得出的大多数数据收集方法的原型是陆地数据收集方法。在陆地数据采集中,最短路由算法是最常用的数据[13]传输算法。在该算法下,发送方选择平面坐标中最接近汇聚的节点作为下一跳[13],[24]。然后,一些研究者提出,如果将最短的路由算法放置在三维坐标环境中,就可以实现海洋数据向UWSN中的地表汇的传输。因此,许多关于海洋数据收集的研究都采用了这种传输机制。然而,水下环境中的数据收集与陆地上的数据收集有很大的不同。首先,传感装置在水下三维空间中的传输距离要比在平面网络中长得多。因此,在陆地[25]上,UWSN比WSN存在严重的能耗不平衡。因此,能源消耗是UWSN [26],[27].的一个主要问题。为了降低近汇区热点节点的高能耗对其使用寿命的影响,UWSN采用了配备了强大的无线通信和数据处理设备[14]的自主水下航行器(AUVs)进行数据采集。利用AUV连续移动接收传感器节点数据,可有效降低传感器节点能耗,延长网络寿命,但需要解决两个关键问题:1)如何优化AUV轨迹,使AUV飞行距离短,2)如何在不影响数据质量的情况下减少传输的数据量。
为了解决上述问题,我们引入了两种机制。两阶段AUV轨迹优化机制和基于矩阵补全的聚类内数据采集机制与以往的研究相比,其贡献如下。
- 本文提出了一种基于聚类和矩阵补全(ACMC)的AUV辅助数据收集方案,可以实现UWSN中能量和时延的综合优化。首先,ACMC方案将传感器节点划分为多个集群,然后选择每个集群中最接近集群中心的节点作为集群头,定期收集普通节点收集的数据。最后,AUV在集群头周围移动,以收集全局数据。从而大大降低了传感器节点和AUV的能耗。此外,对K-means聚类算法进行了两个改进。首先,利用肘部方法绘制成本与不同K值之间的关系图,确定最优K。在选择初始簇中心时,设置一个距离阈值,使不同簇的节点尽可能分离。
- 提出了一种两阶段的AUV轨迹优化机制,有效地降低了AUV的轨迹长度和簇头的工作量。在第一阶段,采用基于簇头位置的贪婪算法,规划AUV的优化轨迹。在第二阶段,选择距离d内AUV轨迹一定的普通节点作为二级集群头,共享集群头的工作,包括簇内数据收集和与AUV的数据通信。然后,基于二级簇头对AUV轨迹进行修正,在AUV轨迹长度略有增加的情况下,可以多次减少簇头的工作负载和能耗。
- 首次提出了一种基于矩阵补全的簇内数据采集机制。对于每个聚类,根据其α值选择βSN节点作为数据样本点,以满足矩阵补全要求。然后,集群头只需要从βSN节点收集数据,并通过AUV将数据提交到接收器。最后,土地数据中心利用矩阵补全技术对所有数据进行恢复,大大降低了传输数据量和成本。
- 实验结果表明,ACMC方案可以实现高效、高速的海上数据采集。与AVA方案相比,ACMC方案降低了AUV的能耗,减少了67.02%–73.88%的数据采集延迟。与ACG方案相比,ACMC方案降低了20.92%–23.67%节点的能耗,大大延长了网络寿命。
本文的其余部分组织如下。在第二节中,对相关工作进行了回顾。系统模型和问题陈述见第三节。在第四节中,提出了ACMC方案。然后,第五节给出了实验结果。这些结论载于第六节。
2.相关工作
目前,UWSN有两种数据采集机制: 1)传统的基于多跳路由的数据采集机制,2)基于AUV辅助的数据采集机制。
在传统的基于多跳路由的机制中,传感器节点协同通信,将各种数据源的数据中继到接收节点[28],端到端延迟是严重的[29]。在基于深度的路由(DBR)协议中,数据包从海洋中的深部节点发送到浅层节点,并逐渐靠近表面上的水池。因此,传感器节点离水池越近,其携带的数据量就越重,导致水下网络出现类似于平面传感器网络[28]甚至更严重的“能量孔”现象。Li等人[30]提出了一种名为DBR-MAC的具有DBR感知的MAC协议,该协议试图以最小的中继跳数向表面接收节点发送数据包。根据节点的深度、角度和邻近信息,设计了一种基于深度的传输调度方案,以确保关键节点比其他节点具有更高的信道访问优先级。
侯et al. [31]提出了一个能量平衡不平等分层集群(EULC)路由算法,执行不均匀的分层根据节点的深度和形成不同大小的集群基于层和水槽之间的距离,提供一个解决方案的“热点”问题通过建设不同大小的集群。
由于节点能量有限和水下传输环境的复杂性,许多研究提出使用AUV沿着预定的轨迹进行数据采集,从而提高了数据采集效率。目前,AUV辅助的数据采集方法主要分为AUV遍历传感器节点方法、AUV遍历簇头方法和AUV遍历空间子区域方法。
Jawhar等人[32]讨论了线性水下网络的管道监测,利用auv沿着管道段移动,并从传感器节点收集数据。它可以有效地降低传感器节点的传输成本,但当传感器节点数量较大时,轨迹长度和数据采集延迟都很大。
Gjanci等人提出了一种基于以信息值(VoI)为目标函数的整数线性规划数学模型的贪婪自适应AUV寻径(GAAP)算法。在该算法下,AUV沿着一条路径连续移动来收集数据,每次只访问一个节点,并贪婪地选择目标函数最大的节点作为导航目标。该方法适用于稀疏水下传感器网络。因为AUV需要遍历所有的节点,这不可避免地会形成一个漫长的路径。此外,AUV的轨迹规划也很困难。
因此,研究者提出了基于聚类的数据收集方法。该方法将传感器节点划分为多个簇,普通节点向簇头发送数据。最后,AUV只需要访问集群头来收集所有数据。Han等[33]提出了一种基于预测的时延优化数据采集算法(PDO-DC)利用成员节点的核岭回归(KRR)得到相应的预测模型。该方法可以降低AUV的能耗,但会导致簇头的过度能耗。
集群磁头的能耗过高。在[34]中,传感器节点被划分为K个区域,每个区域根据浸出协议选择一个簇头。然后,根据簇头进一步划分子区域,从每个子区域中选择一个能量丰富的路径节点,负责数据收集。最后,AUV根据割草机路径通过每个区域,访问路径节点收集数据。
Chen和Lin [35]提出了一种基于空间子区域的数据收集策略,称为移动模型,该策略将水下传感器网络划分为多个三维参考区(3-D ZOR)。AUV在每个3-D ZOR周围移动,从不同的区域收集数据。它包括两个阶段。在第一阶段,AUV收集当前3-D ZOR中节点的数据。在第二阶段中,AUV会唤醒下一个3-D ZOR中的节点。这种方法高度依赖于子区域划分的合理性。
3.系统模型和问题说明
A. Network Scenario
网络场景如下。
- N个传感器节点和一个AUV构建了三维(L×W×H)水下数据采集网络。将N个节点随机部署在不同的水下区域,进行海上数据的采集和传输,每个节点的通信半径为γc。同时,AUV以恒定的速度fs飞行,以有效地收集从节点到接收器的数据。AUV的能量是可以被补充的,所以它是无限的。
- 传感器节点形成一个连通的图G =(S,E),其中S是所有节点的集合,|S| = N和E是任意两个节点之间的链接集。这两个节点必须在彼此之间的通信范围内。网络中每个节点的位置可以用三维坐标S =(x,y,z)表示。由于水下环境中节点的电池难以补充或更换,节点的能量有限,节点的初始能量耗尽就会死亡。
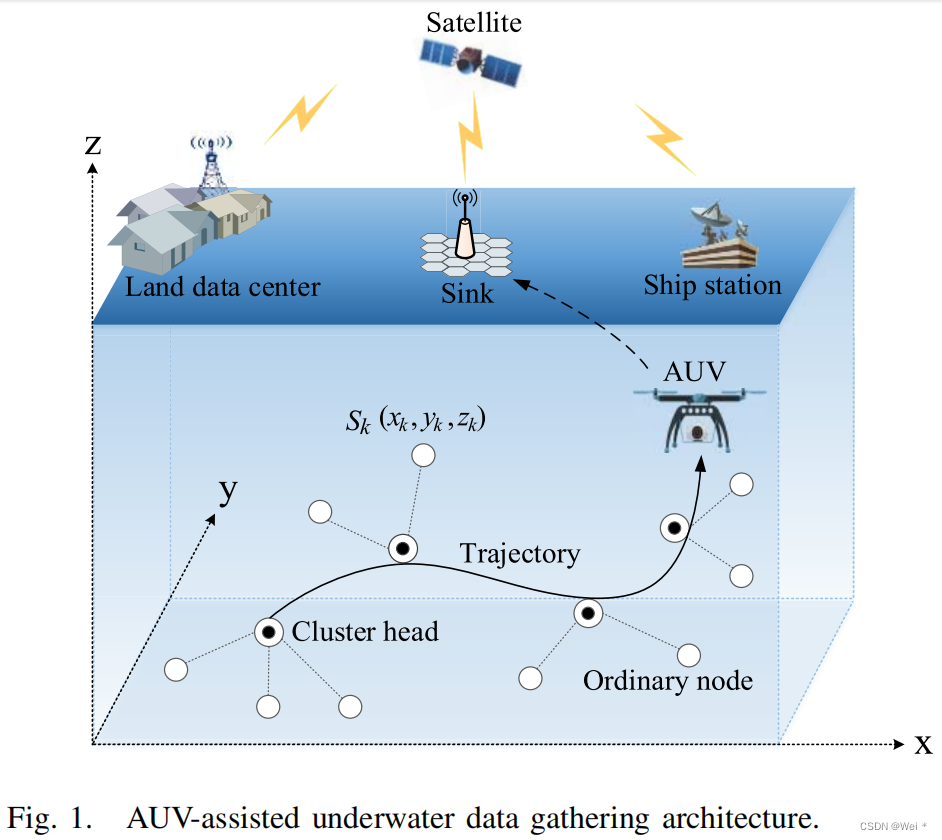
本文所采用的数据采集机制如图1所示。所有传感器节点根据空间距离划分为多个簇,每个簇中选择一个节点作为簇头,其他节点作为普通节点收集数据。在每个时间段内,普通节点将收集到的数据传输到集群头,AUV围绕所有集群头进行全局数据收集,最后将数据报告到接收器。在这个过程中,AUV绕所有星团头部飞行的路径曲线是AUV的轨迹。
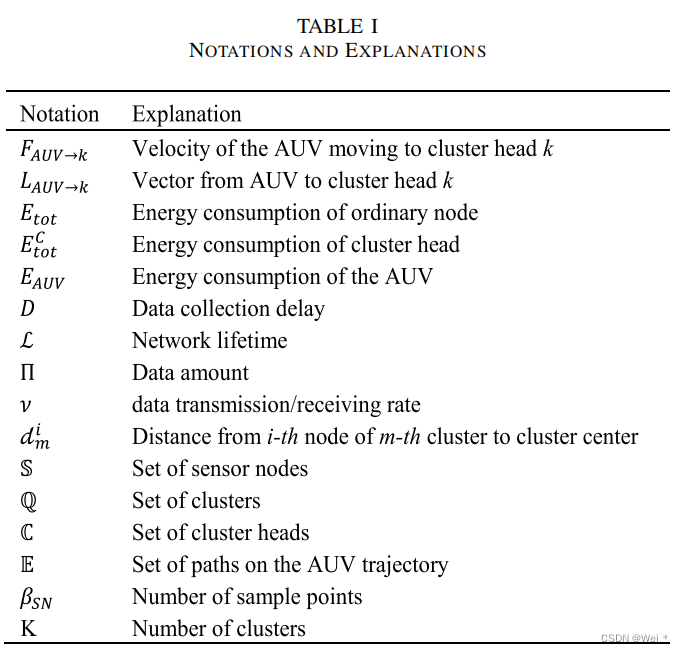
本文所涉及的重要符号及其解释见表一,具体值及其公式将在具体计算中给出。
B. Energy and Delay Model
假设水下环境基本稳定,传感器节点只需要较短距离传输数据在集群中,因此它们的传输速度和质量不受水流的影响。然而,AUV不断地在星团头之间飞行以收集数据,所以它的飞行速度受到重力和浮力的影响。
假设AUV的恒定运动速度为fs,其上升速度为fhv,LAUV→k为从AUV到团簇头CHk的矢量,ϑ为CHk的位置与上升速度矢量之间的夹角。根据[1],AUV移动到CHk的实际速度为

其中

传感器节点的能耗、AUV和数据采集延迟是主要的性能指标。对于每个普通节点,其能源消耗包括数据收集消耗和数据传输消耗

其中φcol为单位时间节点的数据采集消耗,Tc为数据采集时间,φtran为单位时间节点的数据传输消耗,Tt为数据传输时间,Tt=(d/νt),d为传输数据量,νt为节点的数据传输速率。
对于每个集群头,其能耗包括从普通节点接收数据消耗的能量和向AUV传输数据消耗的能量,假设集群中有M个节点,一轮数据采集的能耗如下:

其中φtran和φrec是单位时间集群头的数据传输和接收消耗,i rec是集群头从普通节点接收的数据量,tran是集群头向AUV传输的数据量,νt和νr是集群头的数据传输和接收率。
AUV的能量消耗包括沿簇头移动消耗的能量和从每个簇头收集数据消耗的能量。假设能耗为单位距离ψf,速度为FAUV→k,则数据接收消耗为单位时间ψr,则AUV的能耗可计算为

其中,k→AUV为CHk要传输到AUV的数据量,νAUV为AUV的数据接收速率,C为集群头集。
数据采集延迟是指AUV在一轮数据采集中产生的飞行延迟和数据通信延迟之和,可计算为

C. Problem Statement
本文的研究目标是最小化数据收集成本,如下所示。
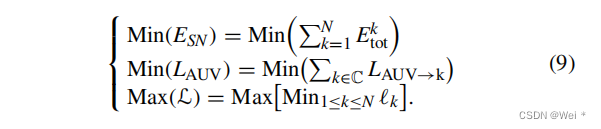
1)最小化传感器节点的能耗:假设网络中有N个传感器节点,第k个节点的能耗为Ek tot,则最小化传感器节点的能耗可计算为

2)最小化的轨迹长度AUV:假设集群头的集合是C,路径向量从AUV k集群头LAUV→k,然后最小化的能量消耗和延迟AUV的轨迹长度由|C|集群头最短

3)最大化网络寿命:本文中的网络寿命是网络[12]中第一个节点的死亡时间。因此,使网络寿命最大化是为了使N个节点中寿命最短的节点的网络寿命k最大化

综上所述,本研究的目标如下:
4.优化算法 DESIGN OF THE ACMC SCHEME
本节提出了一种AUV-ACMC方法,该方法包含三个问题: 1)基于K-means的传感器节点聚类;2)AUV轨迹的两阶段优化和聚类头的选择;3)基于矩阵补全的聚类内数据收集。
A. Clustering of Sensor Nodes Based on K-Means
在本文中,传感器节点的划分是通过改进K-means聚类算法,旨在将N传感器节点分成K集群,并确保一个集群内的节点是之间的尽可能紧凑和不同集群之间的节点尽可能单独的。
我们使用欧氏距离作为相似性度量,从节点到聚类中心的距离作为需要优化的目标函数。假设聚类集为Q = {Q1,Q2,… QK},|Q|=K,Q中的第m个聚团为Qm,则第m个聚团Si m的第i个节点到其聚团中心Sm C(Xm,Ym,Zm)的距离为

根据节点到聚类中心的距离,通过多次迭代得到节点间距最小的最优聚类。目标函数为

基于K-means算法,聚类算法如下。
- 确定传感器节点数N和集群数K。
- 从N个传感器节点中随机选择K个节点作为初始聚类中心。自初始聚类以来中心影响聚类结果和迭代次数,因此,K个初始聚类中心之间的距离必须大于d。假设选择了n个初始集群中心(0 < n < K),当选择(n+1)个集群中心时,只有来自至少dq距离个集群中心的节点可能被选择。
- 对于每个剩余的传感器节点,根据(10)计算其到每个集群中心的距离,并将其划分为最接近该集群中心的集群。
- 完成所有节点的划分后,更新每个集群的集群中心,新的集群中心的坐标为集群中节点坐标的平均值,此时完成一轮迭代。
- 重复步骤3)和步骤4)使用新的集群中心作为相似性度量,直到每个集群中的节点不再发生变化。
显然,在该算法中,K的确定是至关重要的。在一些研究中,K直接设置为总节点的比例,如在[28]中,K设置为20% N。在一些研究中,K是根据网络跨度和节点分布[1]确定的。随着K的增加,集群中节点之间的距离越近,因此节点与集群头之间的传输距离逐渐减小,节点的能耗自然会减小。但与此同时,AUV需要访问的簇头数量增加,AUV的轨迹长度变长,因此AUV的能量消耗和延迟增加。因此,K的优化需要加权节点的能量消耗和AUV的轨迹长度。其优化功能如下:
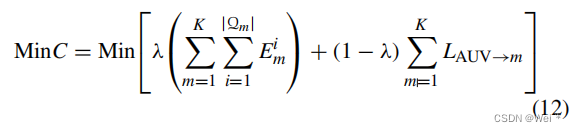
其中,λ是一个加权因子,用于实现节点能耗和AUV轨迹长度之间的权衡。当节点更关注能耗时,λ设置尽可能大,如果更关注AUV轨迹,λ设置非常小。Ei m是第m个簇中第i个节点的能量消耗,LAUV→m是从AUV到第m个簇的簇中心的路径向量。
本文采用肘部法确定了最优K。通过绘制成本与K的关系图,选择拐点处的值作为最优K,首先确定K的范围,假设K的下限为KLow,上限为KUP(0 < KLow≤K≤KUP < N),然后绘制该区间内的关系曲线,得到影响成本函数的值。使用节点到集群中心的距离方差[即,误差平方和(SSE)]成本函数,选择最优K的基础是:当K小于最优集群的数量,K的增加大大增加节点在每个集群的收敛,所以节点的SSE是大大减少。当K达到最优簇数时,增加K所得到的收敛性迅速增强较小,SSE的下降急剧下降,然后随着K的持续增加而逐渐趋于平缓。这意味着SSE和K之间的关系曲线呈现出弯头的形状,且该拐点对应的值为最优K。
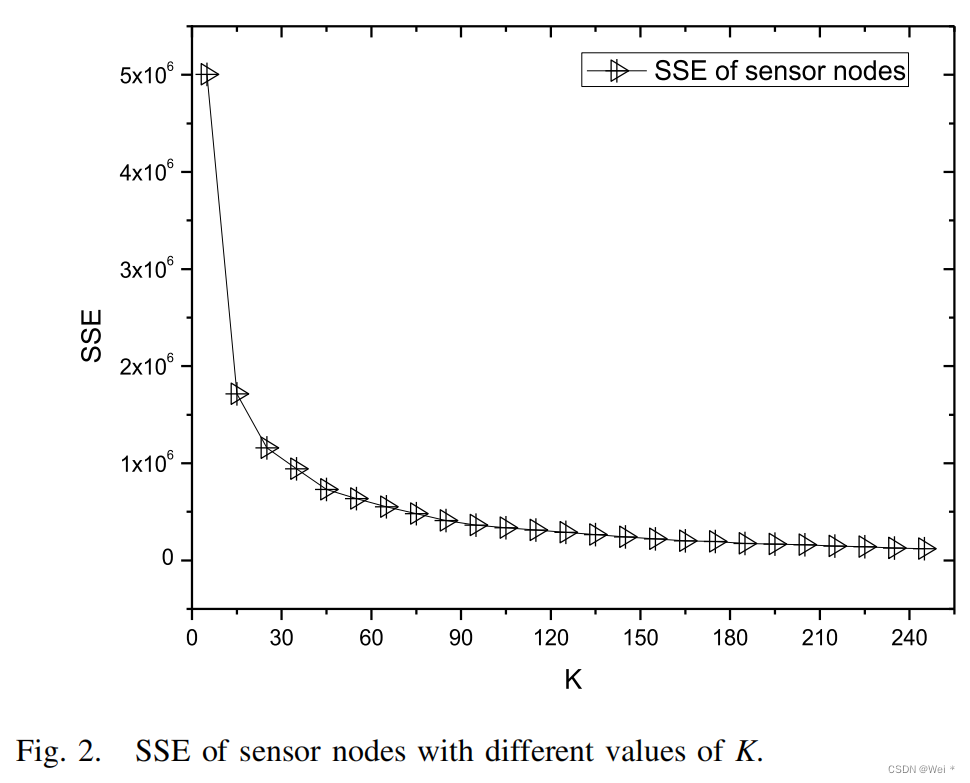
图2为SSE与k的关系,SSE为从普通节点到集群中心的传输距离的方差,是影响节点传输能耗的关键指标。在本文中,我们考虑了一个有500个传感器节点(N = 500)的网络场景,且K的范围为0.01−0.5N。随着K的增加,集群内节点的间距较小,从普通节点到集群中心的传输距离较短,因此SSE较小。从图2可以看出,当K = 5时,SSE值达到5×106,当K = 15时,SSE值下降到2×106以下,降低了近50%。显然,K = 25是SSE和K的拐点。SSE在K = 25之前有非常明显的下降趋势,在K = 25之后,SSE的下降趋势呈平缓趋势。
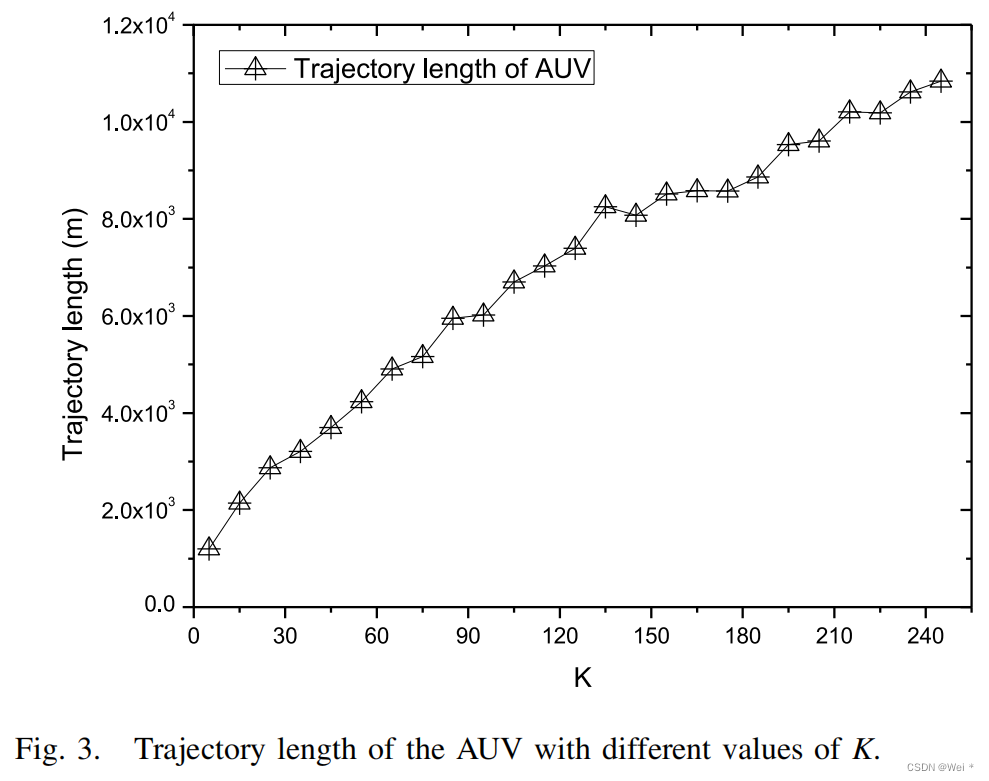
图3显示了轨迹长度与K之间的关系,这间接反映了AUV随着K的增加而产生的能量消耗和延迟。从图中可以看出,与SSE与K之间的关系不同,图3中没有拐点。轨迹长度随K值的增加而增大,呈单向增长趋势。因此,我们选择最优的簇数作为K = 25,这接近于其他方法的最优K值。在简单的方法中选择最优的K,K≈√N/2。
接下来,需要确定每个集群的集群头,以便进行集群内数据收集和与AUV进行数据通信。由于水下传感器节点的能量有限,因此我们将传感器节点的能量消耗作为待优化的主要性能参数,将AUV的数据采集成本作为待优化的第二个性能参数,选择最接近集群中心的节点作为集群头,从而使普通节点到集群头的传输距离最短。
假设传感器节点集为S,聚类集为Q,聚类头集为C,Q中的第m个聚类为Qm,每个聚类和节点都有一个唯一的ID。在第一阶段,K的范围为KLow≤K≤KUP,首先设置一个较小的初始值K,然后使用变量K不断增加K的值,从而计算不同K值下的网络成本。在第二阶段中,第m个聚类的聚类中心为Sm C,然后改进后的聚类算法如算法1所示。
算法1的时间复杂度为O(NKT),其中N为传感器节点总数,K为要划分的簇数,T为迭代次数,有时可以简化为O (N)。
B. Two-Phase AUV Trajectory Optimization and Secondary Cluster Heads Selection
确定AUV的预定轨迹类似于[36]中的最优路线规划。它可以描述如下。假设AUV想要访问K个集群头,并且每个集群头只能被访问一次,最终需要找到一个集群头的访问顺序,这使得AUV的轨迹长度较短。我们使用一个贪婪的算法来构建最短路径,每次围绕AUV的当前位置,选择集群头最近AUV从其余未访问的集群头作为下一个节点访问,所以每次选择的路径是本地最短的。
假设簇头编号从1到K,簇头集为C,第2个簇头为CHi,则得到簇头之间的K个距离矩阵M×K
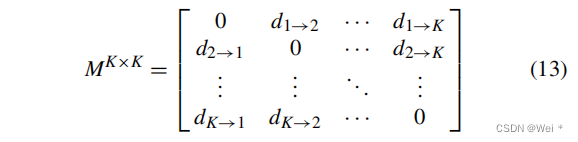
其中,0表示从簇头到自身的距离,di→j表示从簇头CHi到CHj的距离,di→j=dj→i。M是一个成对的矩阵。
AUV的轨迹规划过程如下。
- 首先,计算K个簇头之间的距离,并建立距离矩阵M.
- 以AUV的当前位置为起点,计算每个簇头到AUV之间的距离选择AUV,并选择最近的集群头作为要访问的第一个节点。
- 更新AUV的位置,根据矩阵M从未访问的距离AUV距离最小的集群头中选择下一个被访问的节点,重复上述过程,直到所有集群头都被访问为止。
- 从上次访问的集群头开始,建立到接收节点的路径。该算法如算法2所示。
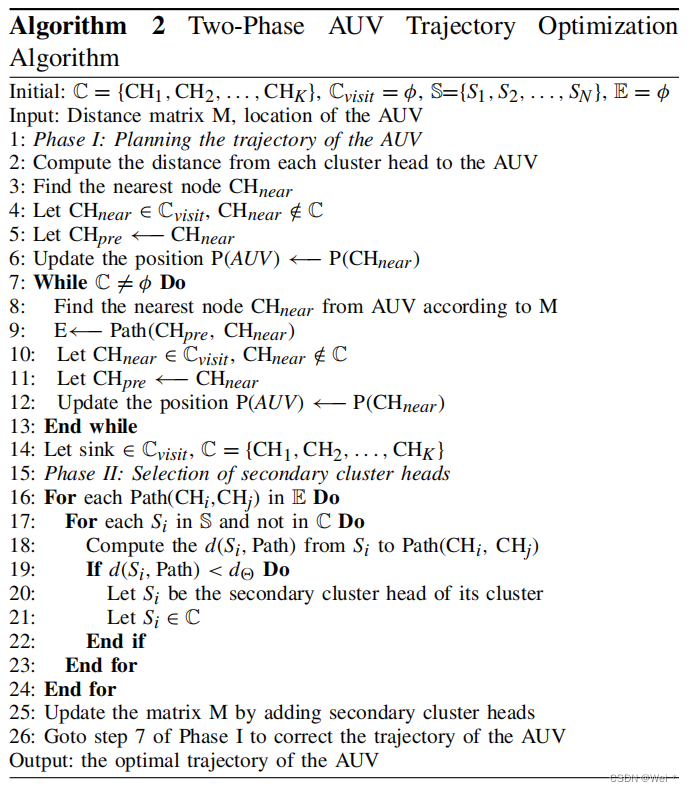
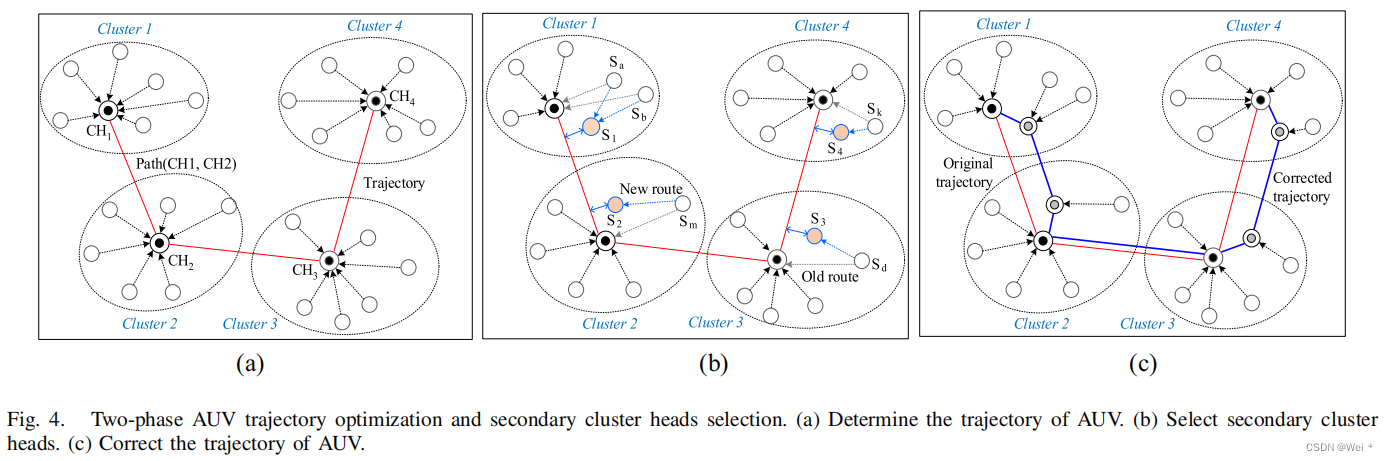
图4(a)通过建立簇头CH1-CH4之间的路径来说明AUV的运动轨迹。从这一点上可以看出普通节点的数据被发送到集群头。当普通节点数较大时,集群头的工作负载就会很大。因此,与其他解决方案不同的是,我们根据计划的AUV轨迹选择次要集群头来共享集群头的工作负载。
假设AUV轨迹上的路径集为E,对于E中的每个路径(CHi,CHj),测量从AUV轨迹附近的节点到该路径的距离。如果它小于距离阈值d,则选择该节点作为其所属集群的辅助集群头。不同集群的次级集群头的数量不同,有些集群可能不存在,有些集群可能有一个或多个。
如图4(b)所示,集群1中的节点S1和集群2中的节点S2距离Path(CH1、CH2)均小于d,因此选择S1和S2作为集群1和集群2的二级集群头。同样地,S3和S4也被选为分别是集群3和集群4的二级集群头。选择节点S1、S2、S3、S4作为次集群头后,集群1中的Sa、Sb、集群2中的Sm、集群3中的Sd、集群4中的Sk改变它们的路由并将数据传输到次集群头。
因为辅助集群头也会从像集群头这样的普通节点中收集数据。因此,AUV需要访问二级簇头,然后修正AUV的原始轨迹。图4©是一个考虑次级簇头的修正轨迹。
假设传感器节点集为S,簇头集为C,已访问的簇头集为Cvisis,AUV轨迹上的路径集为E,CHpre为刚刚访问的簇头,P(AUV)为AUV的位置,d(Si,路径)为节点Si到路径的距离,选择次簇头的距离阈值为d,则二相AUV轨迹优化算法见算法2。
算法2中第一部分的时间复杂度为O(K2),其中K为簇头的数量。第二部分的时间复杂度为O(KN)。当K足够小时,算法2的时间复杂度可以简化为O (N)。
另外,考虑到节点的能量有限,集群头接收到的数据量非常大,我们让集群中的节点轮流作为集群头。如果当前簇头的剩余能量低于某一值(如初始能量的10%),则撤销该节点,然后选择一个靠近簇中心且有足够剩余能量的节点作为新的簇头。
C. In-Cluster Data Collection Based on Matrix Completion
以往的研究表明,在同一或相似区域的节点收集的数据在时间和空间上往往高度相关,数据冗余度较高。因此,采用矩阵补全进行集群内数据采集,只收集每个集群中普通节点的部分数据,通过集群头将数据传输到AUV,最后通过矩阵补全技术恢复数据中心的近似数据。
矩阵补全是从部分子集中恢复低秩矩阵的一种有效技术矩阵[11],[37],[38]。它可以恢复基于部分数据的矩阵VL×W×H的秩为r {L,W,H},(i,j,k)∈D,D是传感器节点的三维坐标集合。
根据传感器节点的坐标分布,可以将聚类划分为与平面网状网络类似的三维网状网络。在网状网络下,每个节点根据坐标(x、y、z)对应一个唯一的网格。假设簇表示为网状网络,其X坐标轴划分为M1部分,每个部分表示为Im,m∈[0,M1];Y坐标轴方向表示为M2部分,每个部分表示为Jm,m∈[0,M2];Z坐标轴方向表示为M3部分,每个部分表示为Km、m∈[0,M3]。根据[11]和[38],通过矩阵补全恢复数据需要两个条件: 1)在空间分布中,需要确保每个轴方向(X、Y、Z轴)都有数据采样点,即对于任意Im、Jm、Km,至少选择一个传感器节点作为数据采样点,2)在数量上,每个集群选择的采样点数βSN必须满足

K是一个常数系数,Q = Max{L,W,H},r是矩阵VL×W×H,r=rank(V)的秩。只要采样点数达到βSN,且每个坐标轴的每一部分至少有一个节点,数据就可以正确恢复。
βSN样本点的选择包括三个阶段:1)中心样本点选择;2)边缘样本点选择;3)辅助样本点选择。当前两部分中选择的采样点数达到βSN时,就不再需要辅助采样点。根据其通信范围内的α个节点数选择采样点。例如,对于一个节点Si(xi,yi,zi),假设其通信范围为γc,并且对于其通信范围内的每个节点(xk,yk,zk),xk−xi≤γc,yk−yi≤γc,zk−zi≤γc。假设Si通信范围内的节点数为Si附近,Si靠近= {S1,S2,… Sz},则Si的α值为|=Z附近的αi = |Si。
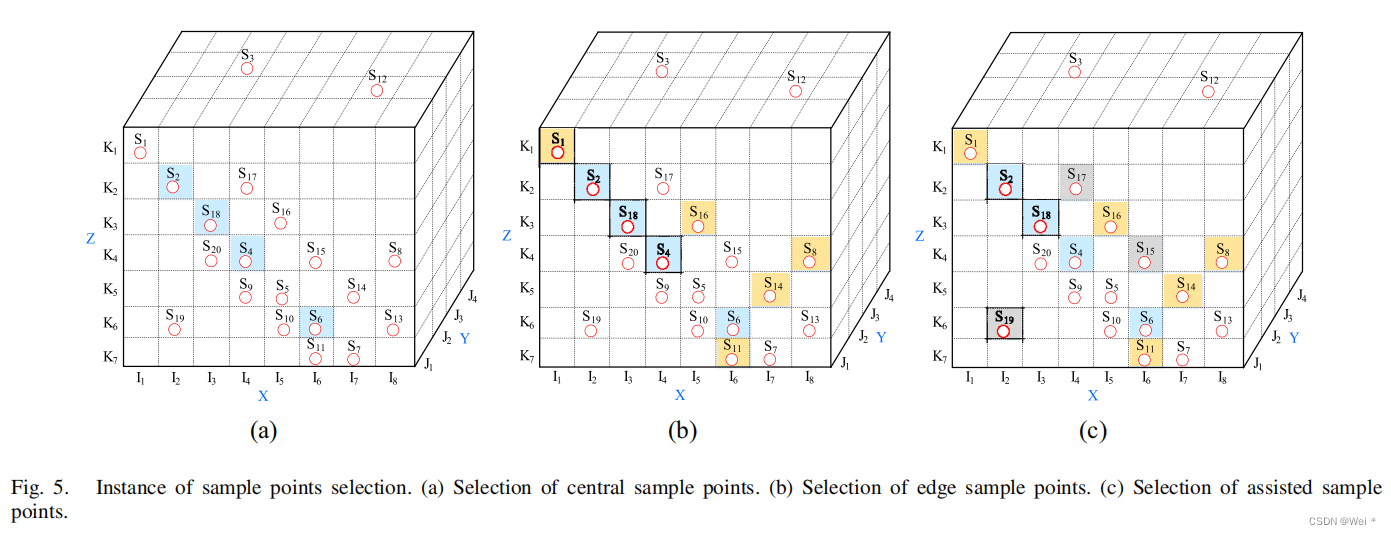
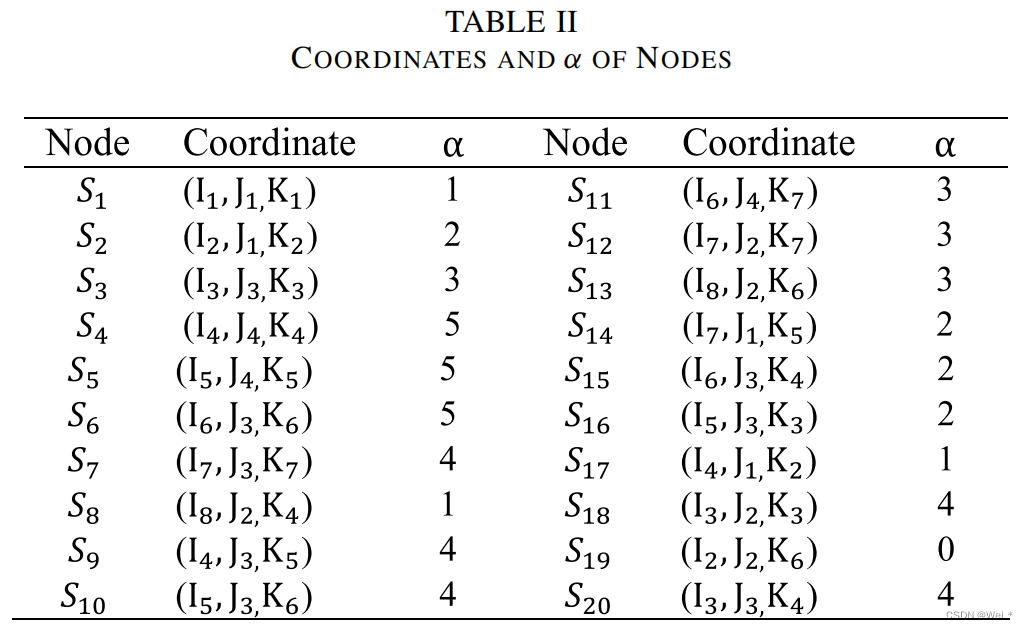
图5显示了一个簇中样本点的选择过程,其中x轴从I1到I8分为8个部分,y轴从J1到J4分为4个部分,z轴从K1到K7分为7个部分。假设图5实例中的γc = 1,节点S1-S20的坐标和α如表2所示。
中心样本点的选择如下。
- 首先计算所有节点的α值,选择α最大的节点作为第一个中心采样点,同时不再选择与Im、Jm、Km相同的节点作为中心采样点;
- 更新节点的α值,其余节点的α值为其初始α值减去通信范围内不再可能作为中心采样点的节点数。在选择了每个样本点后,α值都会发生变化。
- 根据更新后的α值,从其余节点中选择α最大的节点作为中心采样点,重复此过程,直到找不到合格的采样点为止。
图5(a)说明了中心采样点的选择,首先选择S4(I4、J4、K4)作为第一个中心采样点,然后I4、J4、K4中的节点S9、S17、S5、S11、S8、S15、S20不能作为中心采样点。然后,选择节点S6(I6、J3、K6)。同样地,I6、J3或K6中的节点S3、S7、S10、S16、S13和S19也丢失了确认为中心样本点,重复此过程,直到所有节点被取消不合格。本部分中选择的中心样本点为S4→S6→S18→S2。
边缘采样点的选择如下:1)将节点的α值恢复到初始值;2)对于任何Im、Jm或Km,如果没有节点被选择作为中心采样点或边缘采样点,则选择该Im、Jm或Km中α最小的节点作为边缘采样点;3)重复,直到所有Im、Jm或Km至少选择一个节点。
边缘采样点的选择见图5:x轴的(b)、I2、I3、I4、I6、y轴的J1、J2、J3、J4、z轴的K2、K3、K4、K6,其中中心采样点S4、S6、S8、S12都已经有采样点,因此边缘采样点从位于x轴的I1、I5、I7、I7、I8和z轴的K1、K5、K7上的节点中选择。请注意,每次选择一个边缘采样点时,都将删除其Im、Jm或Km。如图5(b)所示,我们选择了S1→S16→S14→S8→S11。
在进行边缘样本点选择后,如果样本点数仍然小于βSN,则进行辅助样本点选择。这部分是为了确保采样点的数量满足矩阵补全的要求。此时,直接从其他节点中选择α最小的节点,直到样本节点数达到βSN。如图5©所示,选择S19→S17→S15作为辅助采样点。
以集群的样本点选择为例,假设该集群中的传感器节点集为SALL,需要选择样本点的节点集为SX,已经选择样本点的节点集为QS。I是节点的X坐标集合,SIm表示X坐标为Im的节点集合;J是节点的Y坐标集,SJm表示Y坐标为Jm的节点集合;K是节点的Z坐标集,SKm表示Z坐标为Km的节点集合。βreal是已选择的样本点数,βSN是要选择的样本点数。然后,在算法3中显示了样本点选择算法。算法3的算法复杂度小于O(M2),M为聚类中的节点数。
5.仿真结果
A. Experiment Setup
本文中的实验场景如下。
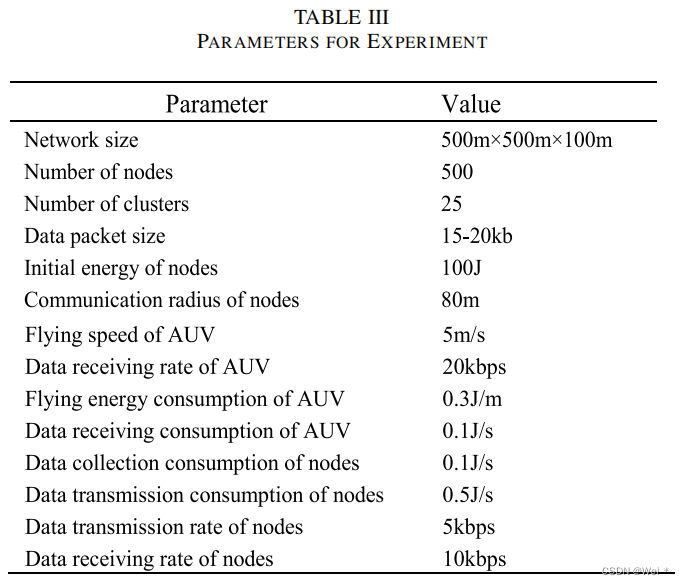
- 500个传感器节点部署在500m×500m×100 m水下网络中,用于海上数据的采集和传输,每个节点的通信半径为80 m,初始能量为100 J。
- 500个传感器节点分为25个集群,每个集群中的集群头(包括二级集群头)负责采集数据,每个时间周期,AUV以5 m/s的速度访问集群头收集全局数据
- 每个包的数据量为15-20kb,传感器节点的数据传输速率为5 kb/s,传感器节点的数据接收速率为10 kb/s,AUV的数据接收率为20 kb/s。其他参数和值见表三。
为了评估ACMC方案在能量和延迟方面的有效性,我们选择了两种比较方案。第一个是AVA方案,它使用AUV访问所有节点以进行全局数据收集。另一种是基于auv辅助聚类的数据收集(ACG)方案。在ACG方案下,将传感器节点分为K个簇,K个= 20%N,并在每个簇中选择一个簇头来采集数据。然后,AUV根据预定的轨迹访问K个集群头,收集所有数据。AVA和ACG方案中的其他参数与ACMC方案相同。
B.传感器节点的能耗
AUV飞行一次并访问所有样本节点以收集并将数据传输到地面接收器的过程称为一轮数据收集。AVA方案下的样本节点均为传感器节点,ACG方案下为集群头,ACMC方案下为集群头和次级集群头。

图中。6和7显示了当数据包大小为15-20kB时,在AVA、ACG和ACMC方案下的传感器节点的能耗。在保持网络参数不变的情况下,传感器节点在连续10轮环境下的能耗如图6所示。可以看出,AVA方案下的节点能耗最小,为2.0417385–2.0563385 J,ACMC方案下的节点能耗略高于AVA方案,即2.2287154–2.2562869 J。显然,在ACG方案下,节点的能耗是最高的,即2.87726–2.8980737 j,这可以解释如下。AVA方案下节点的能量消耗包括数据采集消耗和与AUV的数据通信消耗。所有的传感器节点不需要向其他节点传输数据,也不需要从其他节点中继数据,所以它们的能耗很小。然而,ACG和ACMC方案下的节点的能量消耗包括普通节点的消耗和集群头(包括二次集群头)的消耗,其中普通节点的能量消耗包括数据收集消耗和向集群头发送数据的消耗,集群头的能量消耗包括从普通节点接收数据的消耗和与AUV通信的消耗。因此,与AVA方案相比,ACG方案和ACMC方案具有较大的数据传输消耗,因此总能耗更为严重。对比ACG和ACMC方案,虽然两种方案都采用了基于AUV辅助的聚类机制,因为ACMC方案引入了矩阵补全,但减少了传输数据量和冗余。与ACG方案相比,ACMC方案下节点的平均能耗更小。
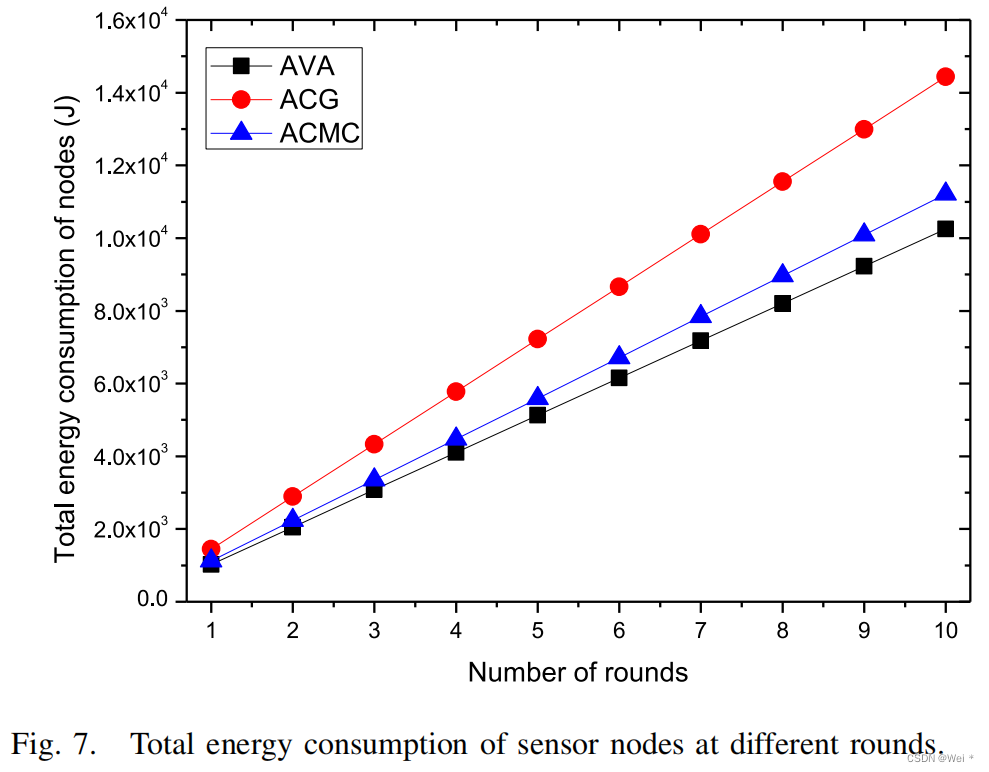
随着数据采集轮数的增加,节点的总能耗如图7所示。它随着数据采集轮数的增加而增加,AVA、ACG、ACMC之间的消费差距更加明显。AVA和ACMC方案下节点的总能耗较小,且增长趋势慢于ACG方案。结合图。6和7,与AVA方案相比,本文提出的ACMC方案使节点的平均能耗增加了7.86%–9.17%,使节点的总能耗增加了8.18%–8.59%。与ACG方案相比,ACMC方案将节点的平均能耗降低21.73%–23.05%,将节点的总能耗降低22.29%–22.68%。
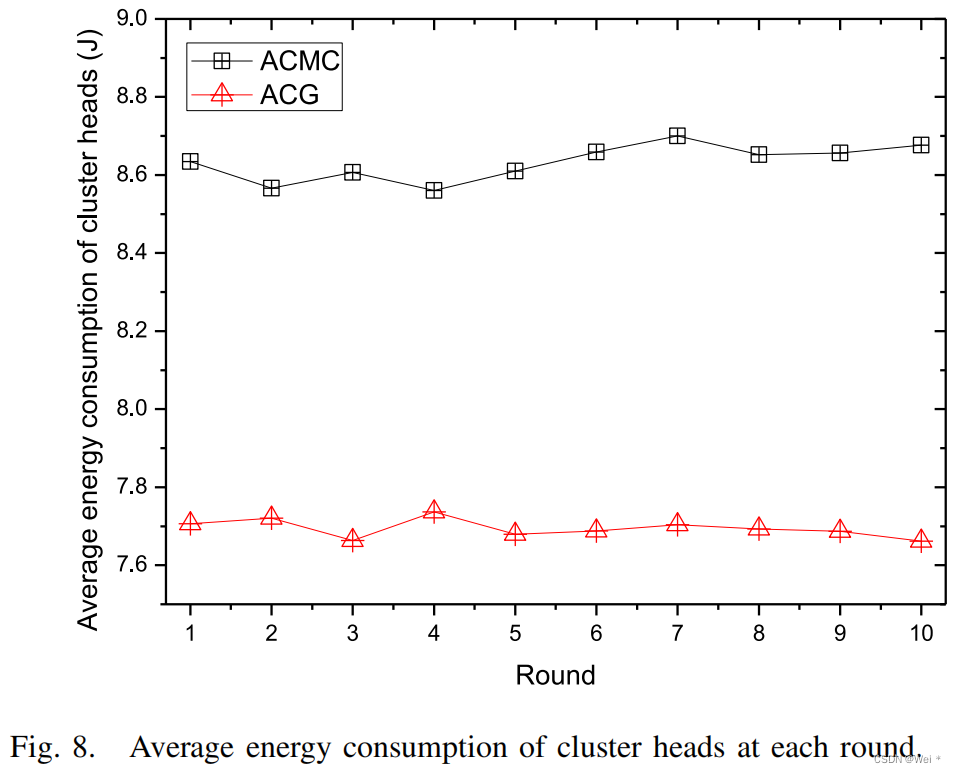
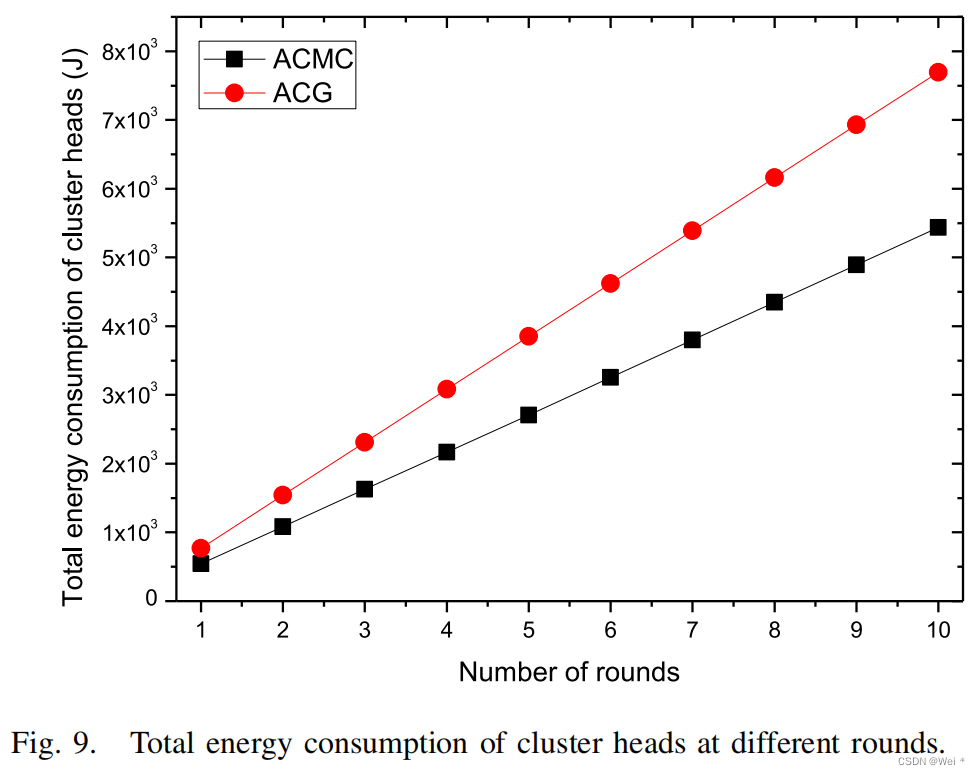
图中。8和9是ACG和ACMC方案下集群头的平均能耗和总能耗。由于ACG方案下的K = 20%N和ACMC方案下的K=25,ACG方案下的簇数量要大得多,那么每个簇中节点之间的间距更紧密,所以数据ACG方案下从普通节点到集群头的传输距离较近,同时被管理的节点数和每个集群头接收的数据量都较小,因此ACG方案下集群头的平均能耗较小。虽然ACG方案下的簇数是ACMC方案的4倍,但ACMC方案下的簇头的平均能耗仅比ACG方案高1-J左右。同时,从图9中可以看出,ACG方案下所有团簇头的总能耗都高于ACMC方案。
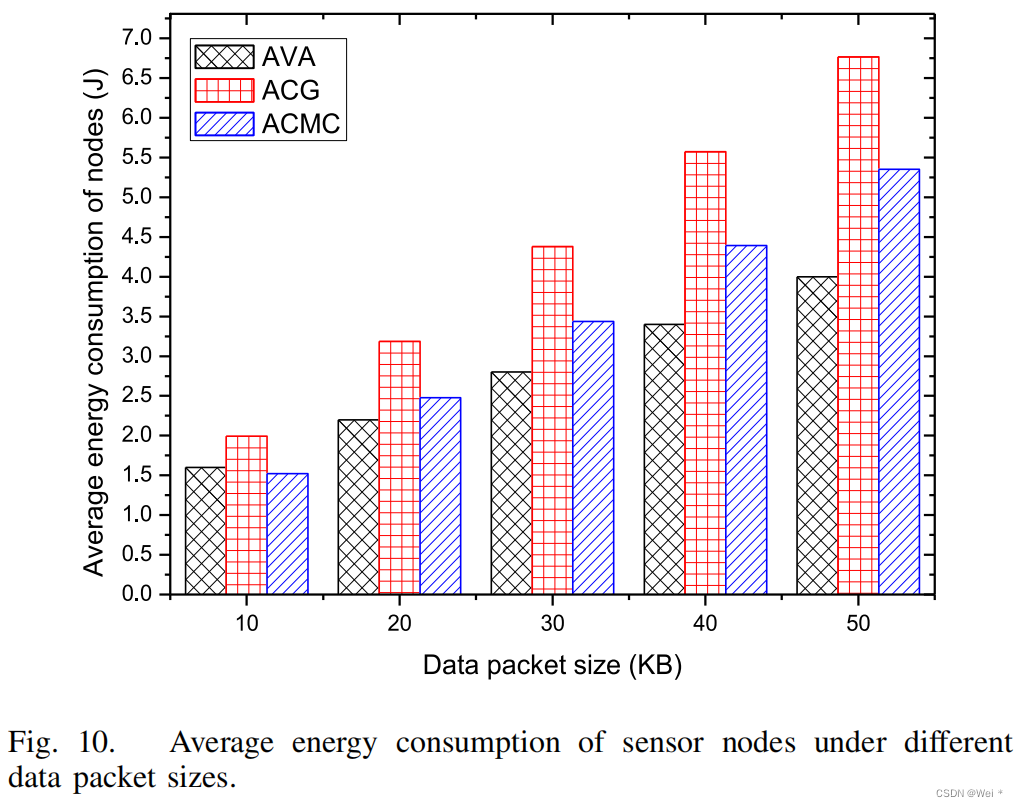
图10为不同数据包大小下节点的能耗。AVA方案下的节点能量消耗最少,其次是ACMC方案,而ACG方案下的节点能量消耗最为严重。当数据包大小为10-50kB时,ACMC方案与AVA方案相比提高了−5.16%–25.25%节点的能耗,与ACG方案相比降低了20.92%–23.67%节点的能耗。
C. Energy Consumption of the AUV
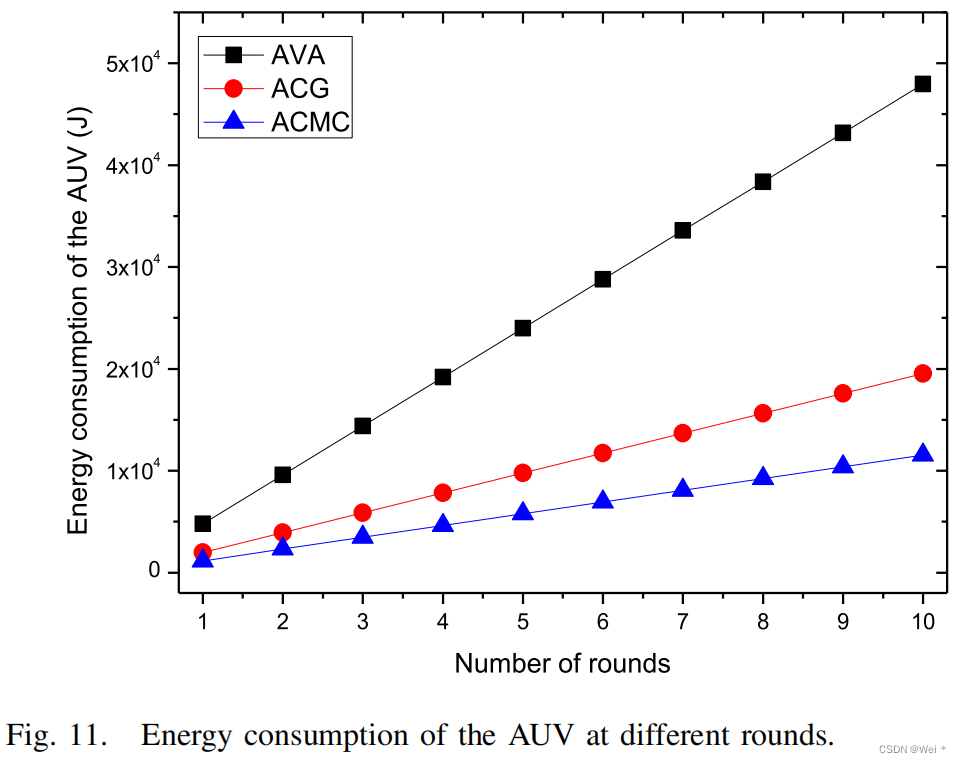
图11显示了AUV的能量消耗。AUV的消耗包括飞行消耗和与集群头的数据通信消耗。飞行消耗主要由轨迹的长度决定,数据通信消耗与数据量有关。当数据包大小为15-20kB时,三种方案基于贪婪算法规划AUV飞行轨迹,AVA方案下AUV的能耗最大,需要访问所有传感器节点,导致较大的轨迹长度。ACG方案下的集群头数大约是ACMC方案的4倍。此外,由于矩阵补全,在ACMC方案下只收集了部分数据。因此,ACMC方案的轨迹长度和数据量较小,因此在ACMC方案下,AUV的能耗最小。从图11可以看出,ACMC方案下AUV的AUV能耗约为AVA方案的24.02%,ACG方案的58.98%。
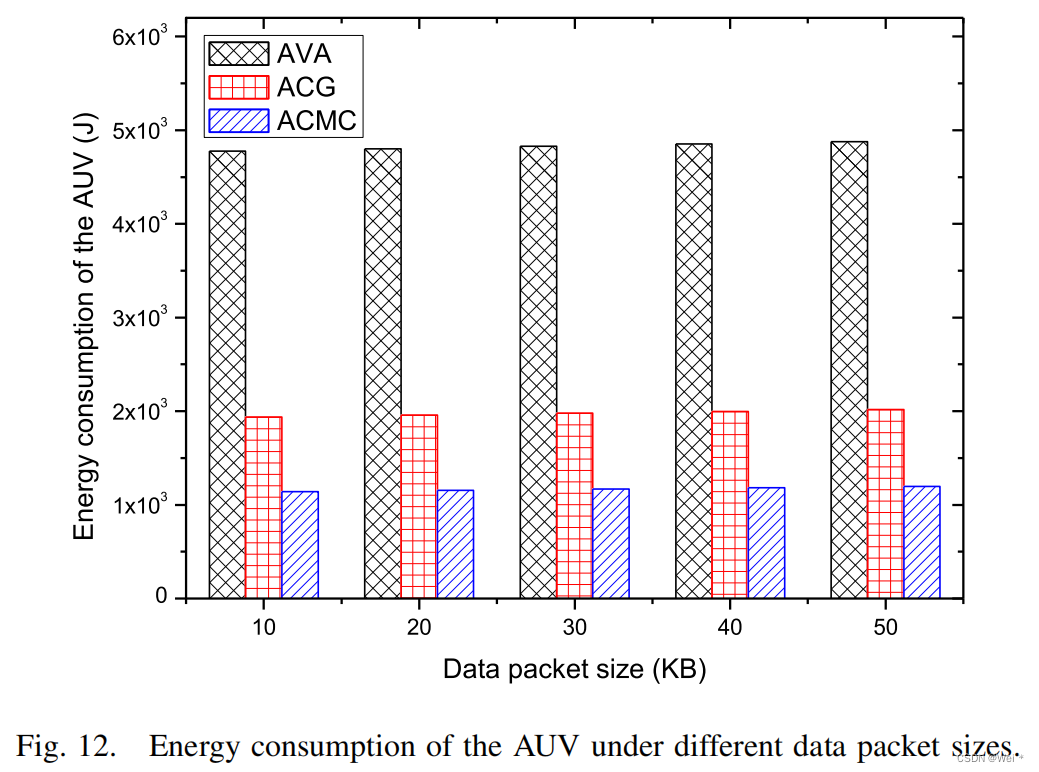
图12为不同数据包大小的AUV的能耗。总的来说,数据量对AUV的能源消耗影响不大。在数据包大小为10和50 kB的情况下,AUV的能耗差异不明显。ACMC方案降低了AUV的能源消耗通过75.43%–76.10%与AVA方案相比,并与ACG方案相比,AUV的能耗降低了40.64%–41.10%。
D. Data Collection Delay
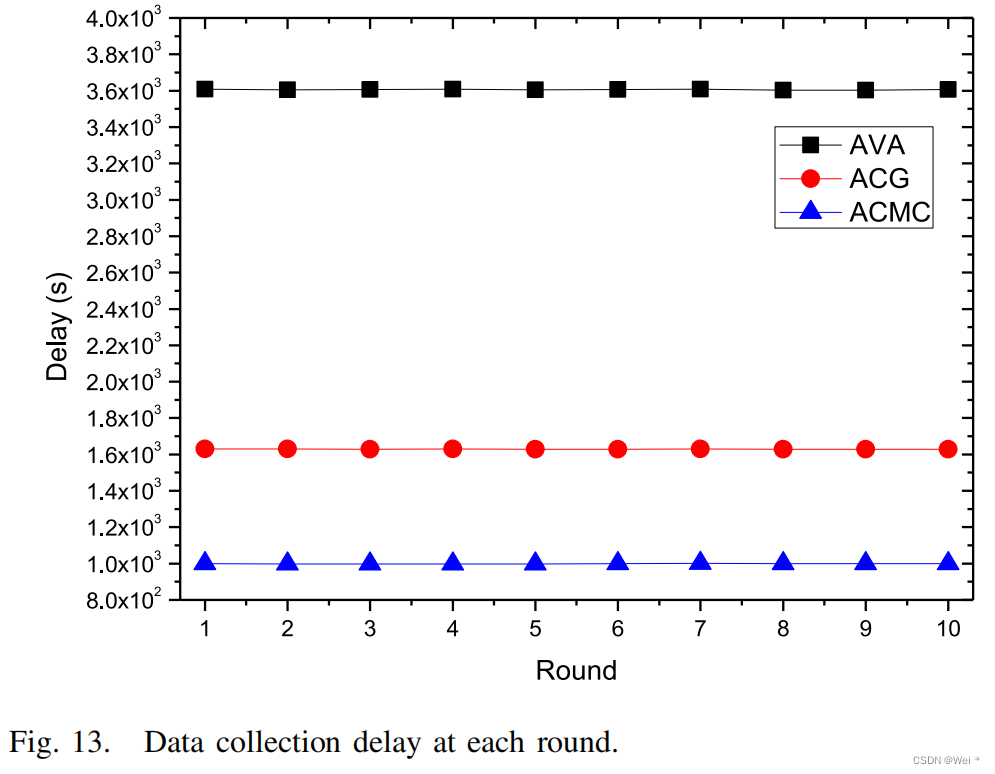
从一轮数据收集的开始到结束所经过的时间称为数据收集延迟。图13显示了10轮下的数据采集延迟,与AUV的能量消耗相似,数据采集延迟与AUV的轨迹长度和传输的数据量有关。从图中可以看出,ACMC方案下的延迟约为1000s(约16.67 min),ACG方案下约为1630s(约27.17 min),而AVA方案下的延迟是最大的,约为3600s(约60 min)。
不同数据包大小的AVA、ACG、ACMC方案下的数据采集延迟如图14所示。当数据包大小分别为10、20、30、40和50 kB时,ACMC方案下的数据采集延迟与ACG方案相比减少了36.08%–39.64%,与AVA方案相比减少了67.02%–73.88%。
E. Network Lifetime
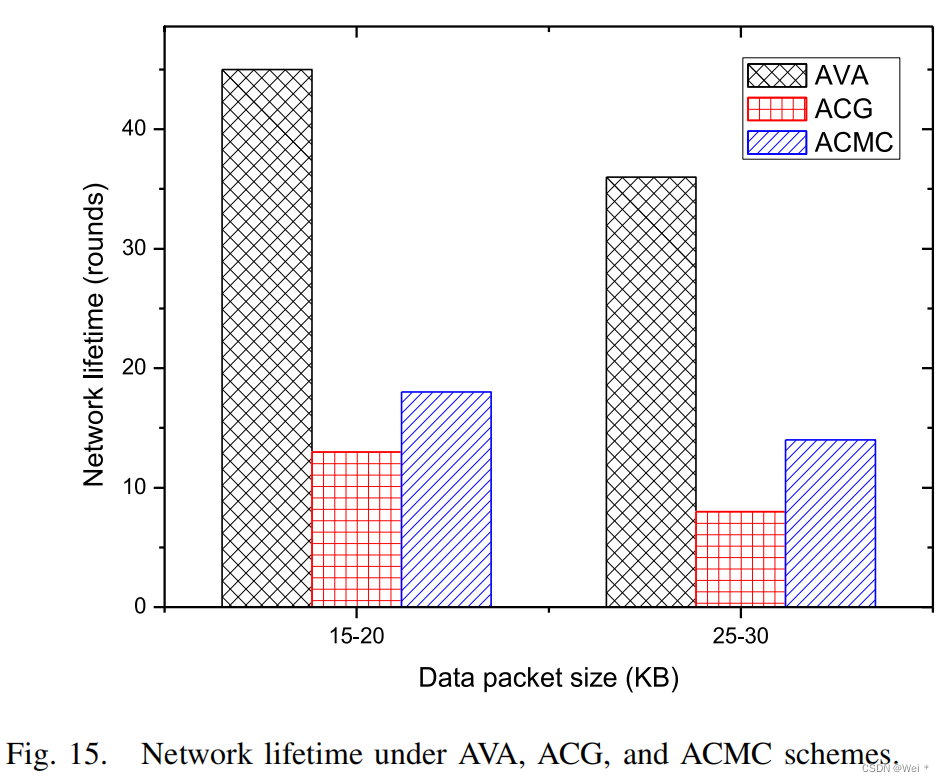
网络生命周期是指网络中第一个节点的死亡时间,因此消耗量最大的节点是影响网络生命周期的关键节点。在AVA方案下,节点的能耗很小,但在ACG和ACMC方案下,集群头的能耗远远高于普通节点。如图15所示,AVA方案下的网络寿命最大,其次是ACMC方案。当数据包大小为15-20kB时,ACMC方案比ACG方案将网络寿命提高了38.46%。当数据包大小为25-30kB时,ACMC方案与ACG方案相比提高了约75%。
F. Effect of Other Parameters on the Performance
图中。16-18比较了具有不同簇数的ACG和ACMC方案之间的能源消耗和延迟。从图16可以看出,由于ACMC方案引入了矩阵补全技术,减少了传输的数据量,因此ACMC方案下节点的能耗比ACG方案少,节点的能耗降低了30%以上。自从在进行两阶段AUV轨迹优化时,ACMC方案选择了二级簇头,与ACG方案相比,簇头的数量有所增加,从而降低了簇头的能耗,但轨迹长度略有增加。从图17可以看出,AUV的能耗略高于ACG方案。最后,如图18所示,ACMC方案和ACG方案之间的数据采集延迟没有太大的差异。
指的是图。6-18,比较AVA、ACG和ACMC方案在能量、延迟和网络寿命方面的性能,可以得出以下结论。
- 相比基于聚类的ACG方案和ACMC方案,AVA方案有更好的性能的能耗的节点和网络寿命,但它有很高的能耗AUV和严重的数据收集延迟,大约是ACMC方案的四倍
- 与ACG方案相比,ACMC方案在节点能耗和AUV、网络寿命和数据收集延迟方面具有更好的性能。
6.总结
在本文中,我们提出了一种低延迟的AUV辅助的数据收集方案——ACMC,用于高效和超可靠的海上数据收集。在ACMC方案下,讨论了基于改进的k均值的节点聚类、基于贪婪算法的两阶段AUV轨迹优化和基于矩阵补全的数据采集三个研究问题。实验结果表明,与使用AUV访问所有节点的传统数据收集方案相比,ACMC方案将AUV的数据收集延迟和能耗降低了约4倍。与基于聚类的方案相比,ACMC方案将节点能耗降低了30%以上,大大提高了网络寿命,对提高海上数据收集效率具有重要作用。在进一步的工作中,我们将考虑等大小集群的划分和选择优化的二级集群头,以进一步优化网络性能。
补充
k-means聚类
拐点法确定k
轨迹规划是贪心的
二级簇头是直接判断节点到路径的距离是否小于阈值
还有个 基于矩阵补全的簇内数据收集,




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











