






💥1 概述
基于蚁群算法的路径规划研究是一个涉及多个领域的复杂课题,以下是对该研究的详细分析:
一、蚁群算法概述
蚁群算法(Ant Colony Optimization, ACO)是一种模拟自然界中蚂蚁觅食行为的优化算法。蚂蚁在寻找食物的过程中,会在其经过的路径上释放一种称为“信息素”的化学物质。其他蚂蚁能够感知到这些信息素,并倾向于沿着信息素浓度较高的路径移动。这种正反馈机制使得蚂蚁最终能够找到从巢穴到食物源的最短路径。蚁群算法正是基于这种原理,通过模拟蚂蚁的觅食行为来解决优化问题。
二、蚁群算法在路径规划中的应用
路径规划是智能交通系统、机器人导航、无人机飞行等多个领域中的一个基本问题。蚁群算法因其良好的全局优化能力、本质上的并行性和易于用计算机实现等优点,已被广泛应用于路径规划领域。
1. 基本原理
在路径规划中,蚁群算法将待优化的路径视为蚂蚁的觅食路径,将起点视为巢穴,终点视为食物源。蚂蚁在搜索过程中,会根据路径上的信息素浓度和启发函数(如距离倒数)来选择下一步的移动方向。信息素浓度较高的路径表示该路径被更多蚂蚁选择过,因此更有可能接近最优解。启发函数则用于引导蚂蚁向目标点移动,减少搜索的盲目性。
2. 算法流程
蚁群算法在路径规划中的基本流程包括初始化、蚂蚁移动、信息素更新和迭代优化等步骤。在初始化阶段,设置蚂蚁数量、信息素浓度、启发函数等参数,并初始化蚂蚁的起始位置和移动方向。在蚂蚁移动阶段,每只蚂蚁根据当前位置的信息素浓度和启发函数选择下一个移动方向,并更新自己的位置。在信息素更新阶段,根据蚂蚁的移动结果更新路径上的信息素浓度。最后,通过多次迭代优化,使得蚂蚁逐渐收敛到最优路径上。
3. 改进与优化
为了克服蚁群算法在路径规划中可能存在的收敛速度慢、易陷入局部最优等问题,研究者们提出了多种改进算法。例如,引入方向夹角和双向搜索策略来提高算法的寻优能力和收敛速度;结合遗传算法等其他优化算法来增强算法的全局搜索能力;以及根据具体问题特点调整算法参数等。
三、研究现状与挑战
目前,基于蚁群算法的路径规划研究已经取得了显著进展,并在多个领域得到了成功应用。然而,随着城市路网规模的不断扩大和交通流量的显著增加,路径规划问题变得更加复杂和多样化。因此,如何进一步提高蚁群算法的适应性和鲁棒性、降低算法的计算复杂度、以及将算法更好地与实际问题相结合等问题仍然是当前研究的热点和难点。
四、未来展望
未来,基于蚁群算法的路径规划研究将继续向以下几个方向发展:一是深化算法理论研究,探索更加高效、稳定的优化算法;二是拓展应用领域,将算法应用于更多实际场景中;三是加强跨学科合作与交流,促进算法与其他领域技术的深度融合与创新发展。
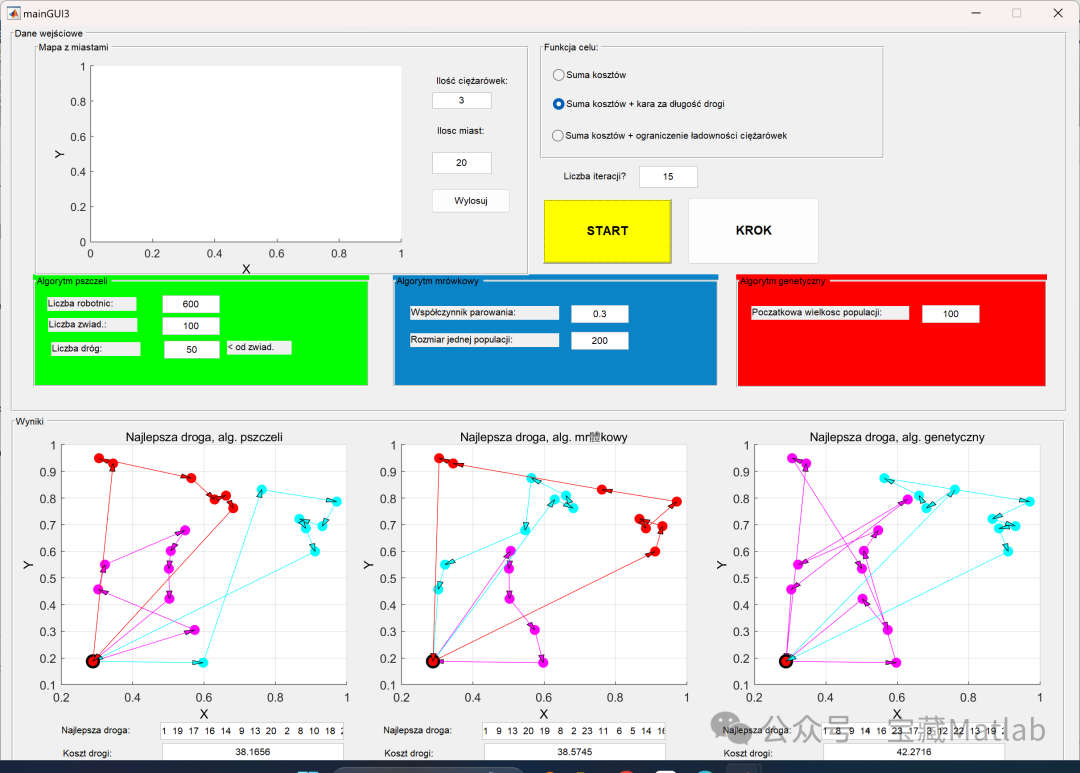
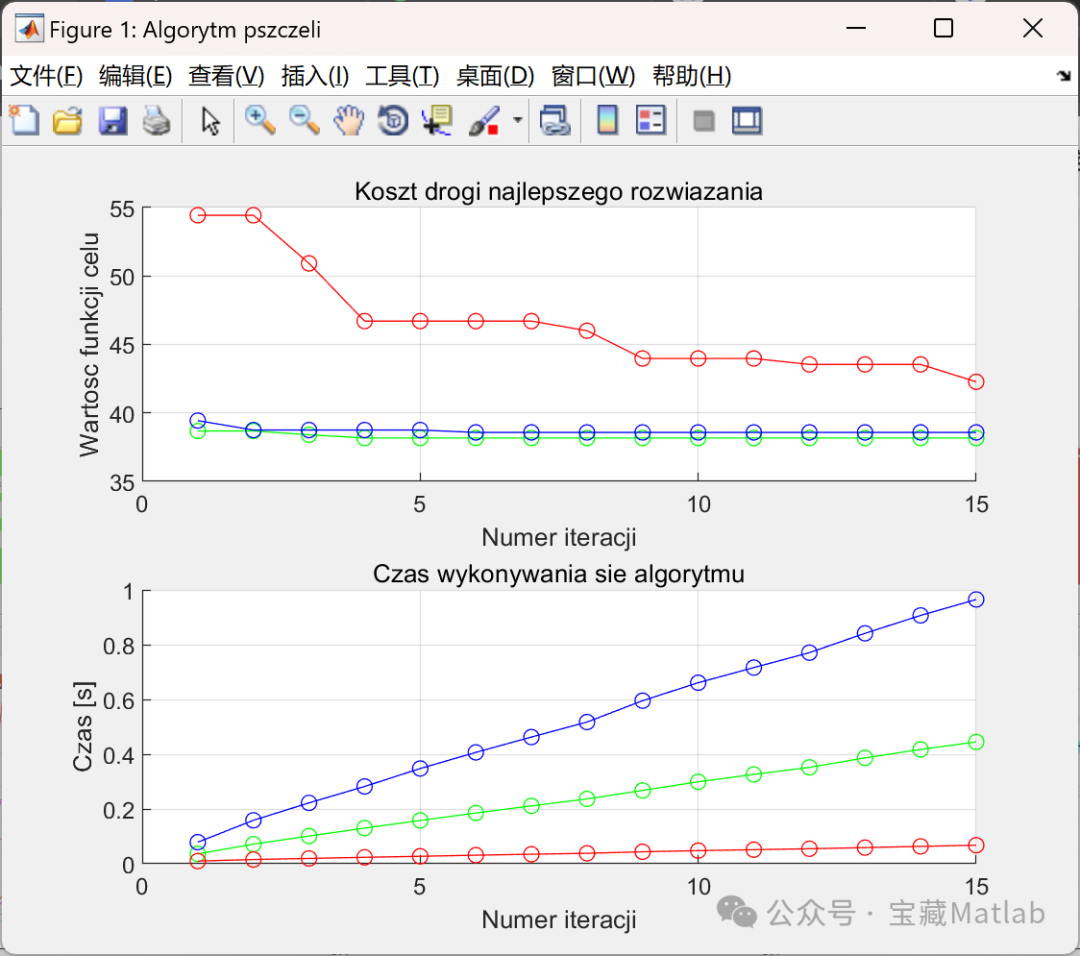
📚2 运行结果
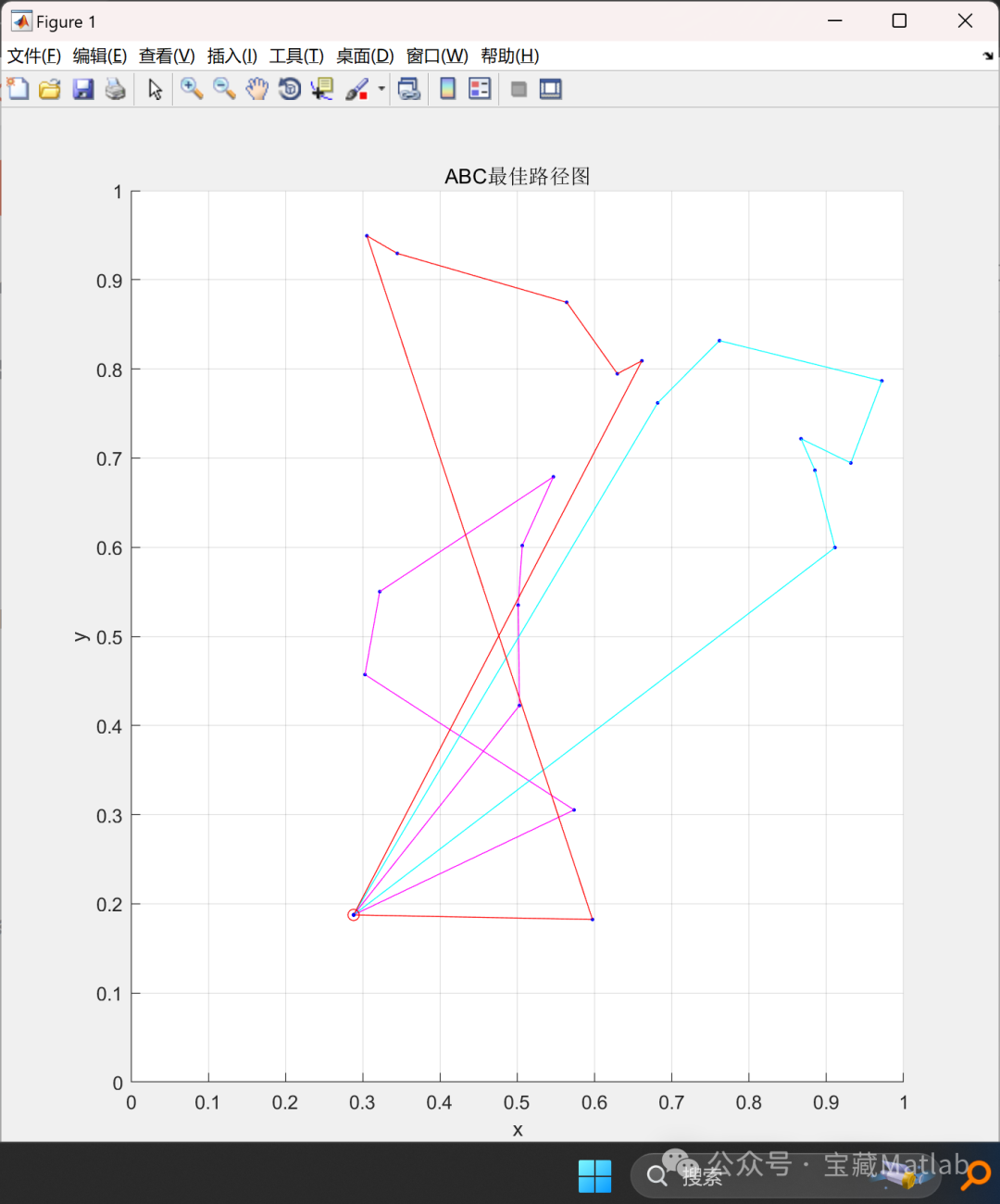
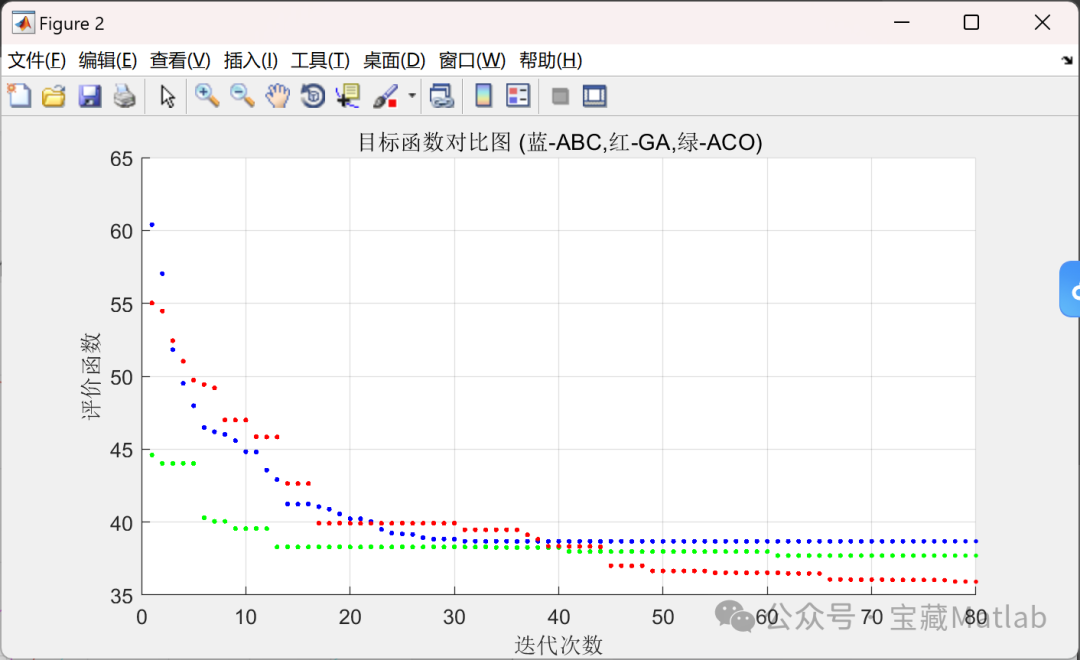
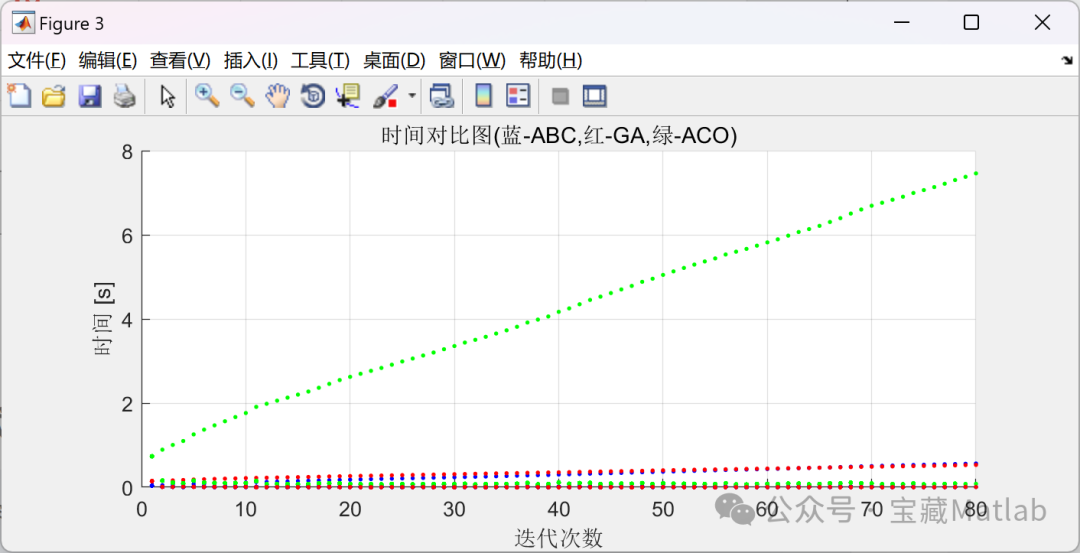
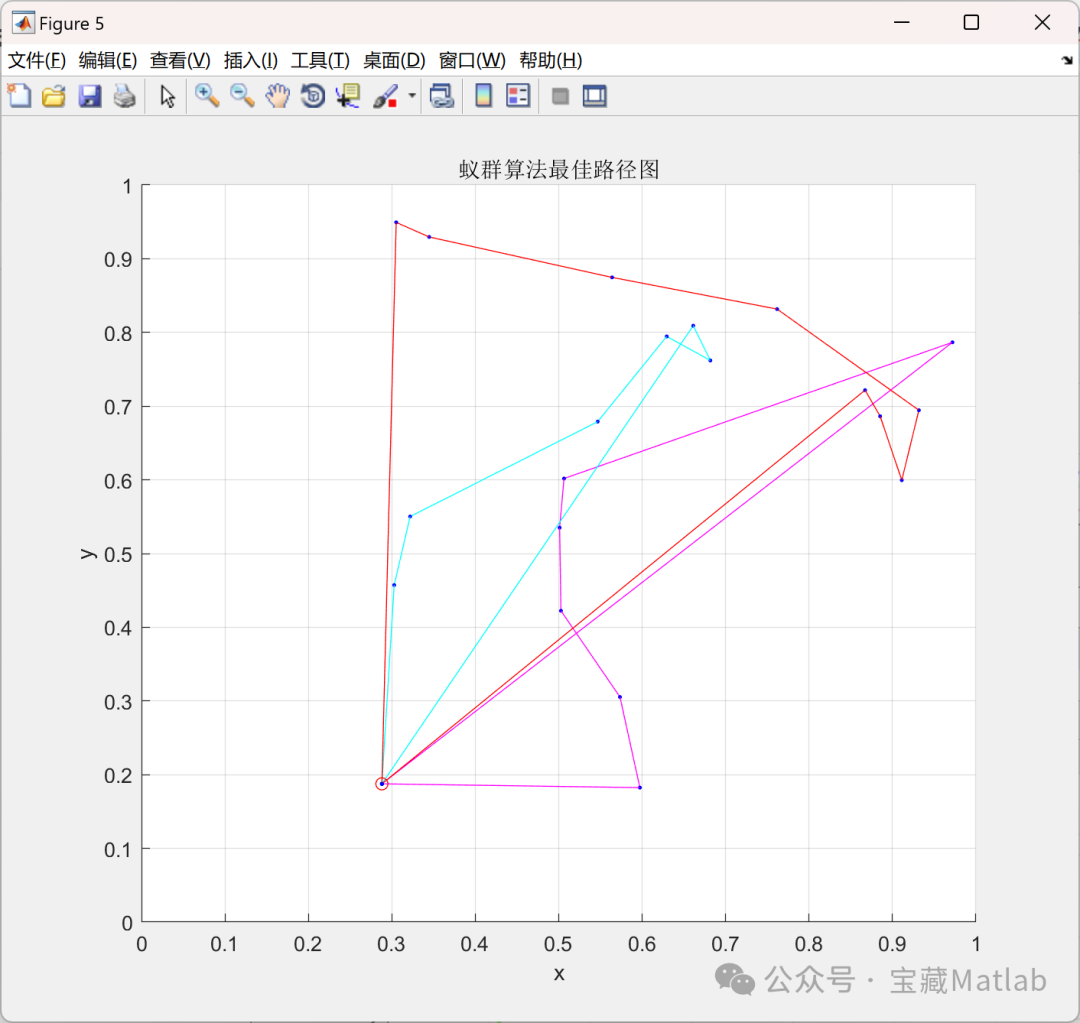
部分代码:
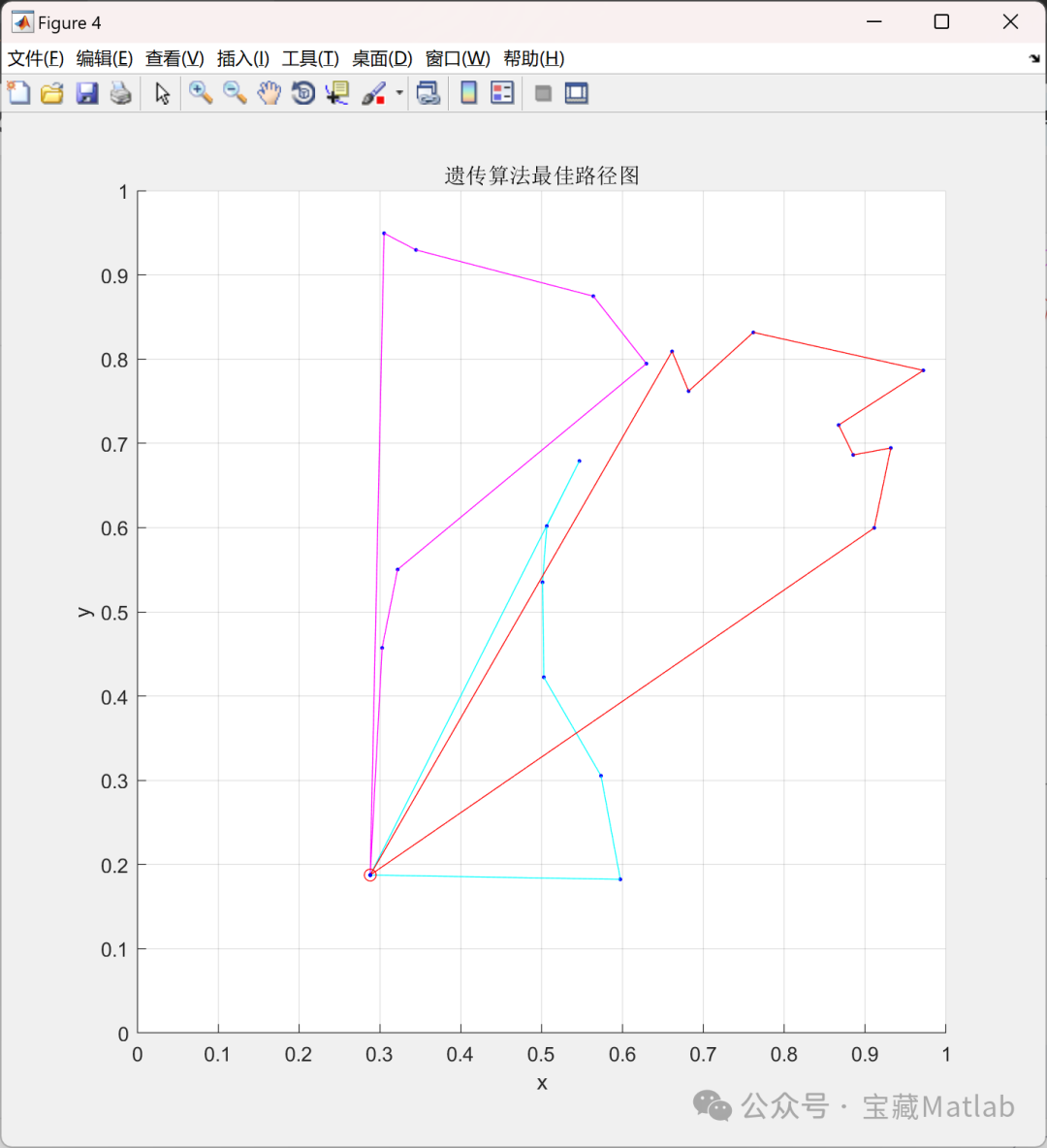
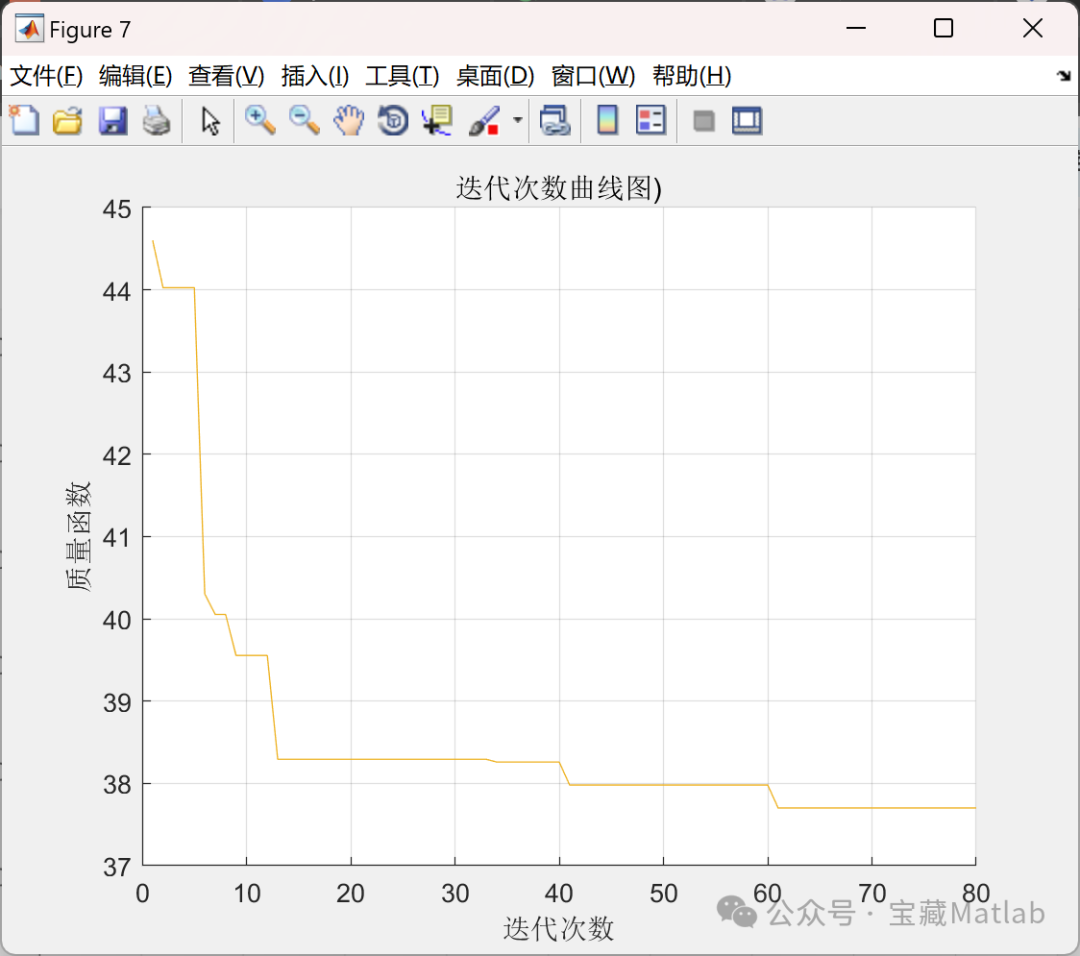
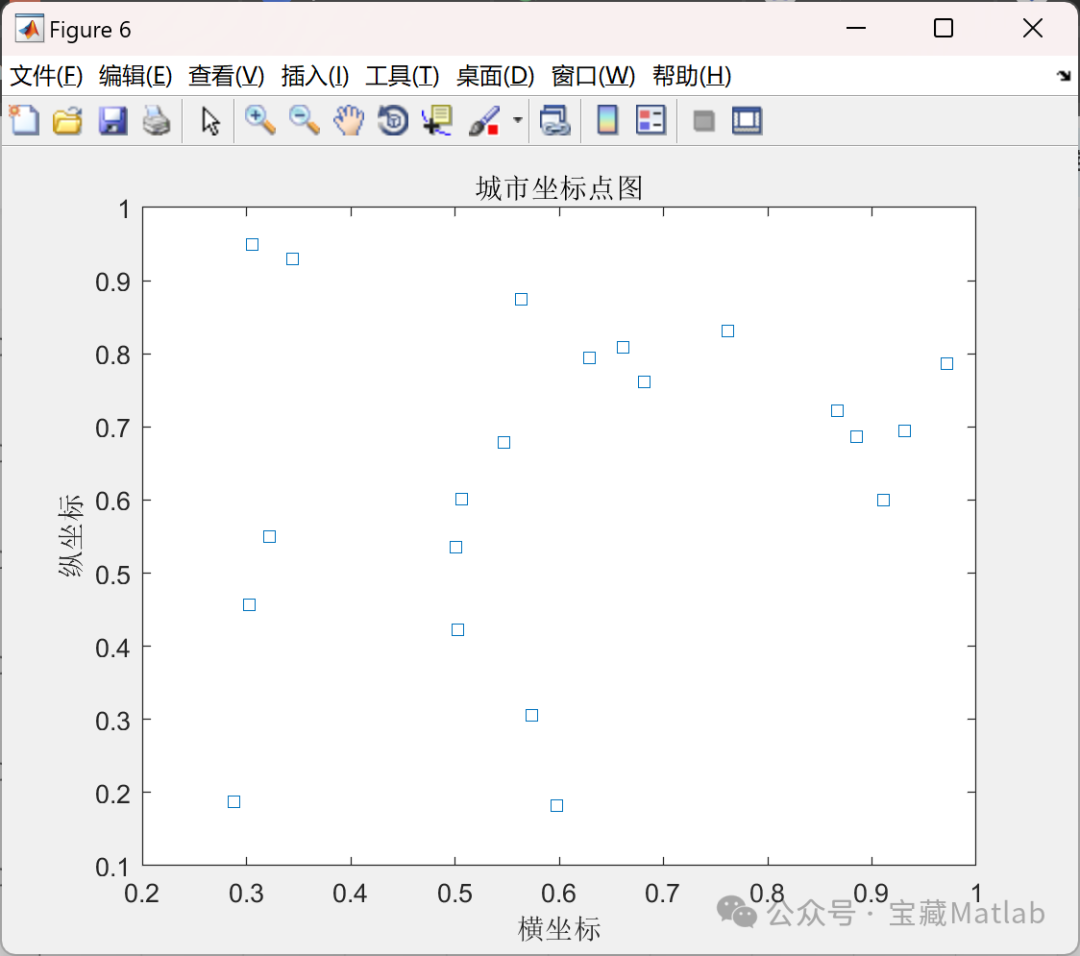
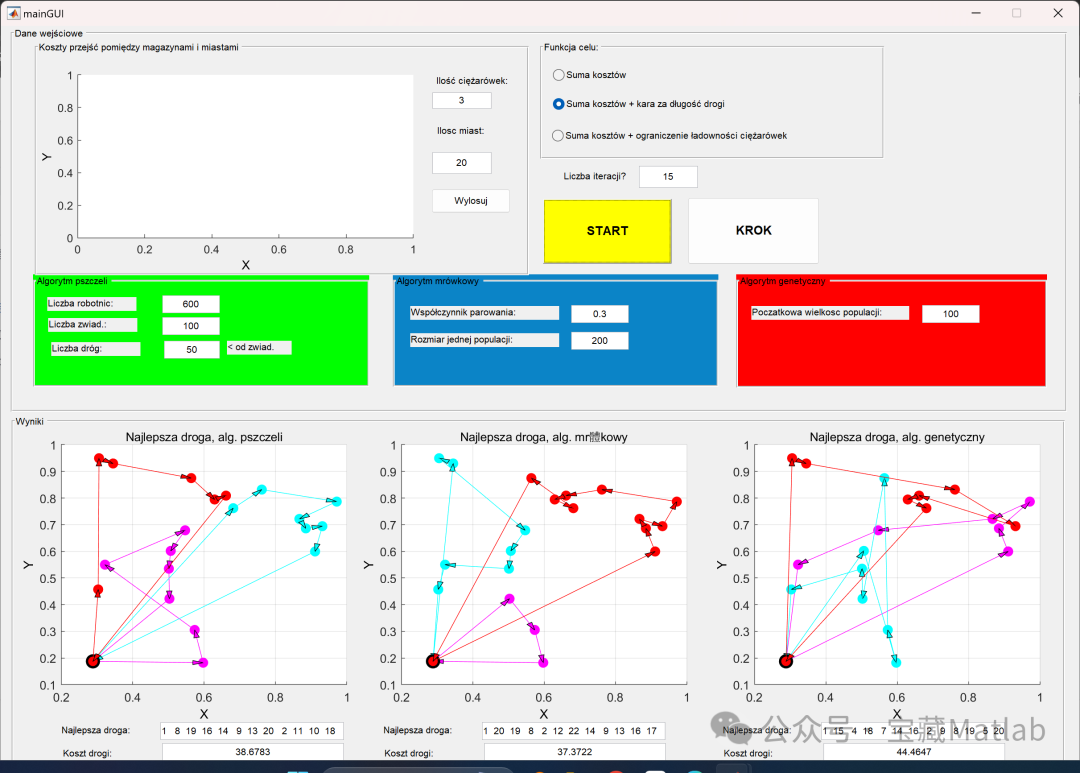
n = 3 %卡车数量size = 20; %城市数量global N CnCn = n;N = size;type = 1;% 目标函数的类型从0到2 - 参考quality.m[cost_matrix points] = generate_matrix(size, n);%%%%%%%%%%%%%%%%%%%%BEE_routes=[];BEE_q=[];BEE_time=[];bee_init(cost_matrix,n,200,5,3);ANT_routes=[];ANT_q=[];ANT_time=[];ant_init(cost_matrix, n, inf,1.6, 20, 10, 0.5, 3, 15, 1, 40, Inf);% 46.3 37.7 37.4 41% Cie,poj,bet,al1, al2, ro, g1, g2, g3, pop, poprGEN_routes=[];GEN_q=[];GEN_time=[];gen_init(100);for k=1:max_itertic;[best_route best_q] = bee_step;BEE_time = [BEE_time toc];BEE_routes = [BEE_routes best_route];BEE_q = [BEE_q best_q];show_path( 1, best_route, points, n,0,'ABC最佳路径图');set(1,'Position',[0 0 704 772]);figure(2);hold on;title('Best solution graph (blue-bee,red-gen,green-ant)');xlabel('Iteration');ylabel('Quality function');plot(BEE_q,'.b');set(2,'Position',[721 421 704 354]);grid on;hold off;figure(3);hold on;title('Step time graph / Cumulative time (blue-bee,red-gen,green-ant)');xlabel('Iteration');ylabel('Time [s]');plot(BEE_time,'.b');plot(k,sum(BEE_time),'.b');set(3,'Position',[718 49 704 284]);grid on;%%tic;best_routes=[];best_qs=[];%disp('迭代次数')iter=k %外循环迭代的次数ANT_k_r=30;%蚂蚁个数?for ANT_k = 1:ANT_k_r[best_route best_q] = ant_step;best_routes=[best_routes;best_route];best_qs=[best_qs;best_q];end;% BSO算法[best_route best_q]=BSO_arg(best_routes,best_qs,ANT_k_r)%聚类 -> 每个类中挑出最优解 -> 对每个最优解进行2-opt -> 比较新旧值 -> 输出结果%%ANT_time = [ANT_time toc];% ANT_routes = [ANT_routes best_route'];% ANT_q = [ANT_q best_q];if k>1if ANT_q(end)<best_qANT_q = [ANT_q ANT_q(end)];ANT_routes = [ANT_routes ANT_routes(:,end)];elseANT_q = [ANT_q best_q];ANT_routes = [ANT_routes best_route'];endelseANT_q = [ANT_q best_q];ANT_routes = [ANT_routes best_route'];endshow_path( 5, best_route', points, n,0,'蚁群算法最佳路径图');set(5,'Position',[0 0 704 772]);figure(2);hold on;title('Best solution graph (blue-bee,red-gen,green-ant)');xlabel('Iteration');ylabel('Quality function');plot(ANT_q,'.g');set(2,'Position',[721 421 704 354]);grid on;hold off;figure(3);hold on;title('Step time graph / Cumulative time (blue-bee,red-gen,green-ant)');xlabel('Iteration');ylabel('Time [s]');plot(ANT_time,'.g');plot(k,sum(ANT_time),'.g');set(3,'Position',[718 49 704 284]);grid on;tic;[best_route best_q] = gen_step;GEN_time = [GEN_time toc];GEN_routes = [GEN_routes best_route];GEN_q = [GEN_q best_q];show_path( 4, best_route', points, n,0,'遗传算法最佳路径图');set(4,'Position',[0 0 704 772]);figure(2);hold on;title('目标函数对比图 (蓝-ABC,红-GA,绿-ACO)');xlabel('迭代次数');ylabel('评价函数');plot(GEN_q,'.r');set(2,'Position',[721 421 704 354]);grid on;hold off;figure(7);hold on;title('迭代次数曲线图)');xlabel('迭代次数');ylabel('质量函数');plot(ANT_q);set(2,'Position',[721 421 704 354]);grid on;hold off;figure(3);hold on;title('时间对比图(蓝-ABC,红-GA,绿-ACO)');xlabel('迭代次数');ylabel('时间 [s]');plot(GEN_time,'.r');plot(k,sum(GEN_time),'.r');set(3,'Position',[718 49 704 284]);grid on;figure(6);plot(points(:,1),points(:,2),'s');title('城市坐标点图');xlabel('横坐标');ylabel('纵坐标');pause(0.01);end;
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]董金明.基于蚁群算法的路径规划研究[D].陕西师范大学,2010.DOI:CNKI:CDMD:2.2009.258463.
[2]华路.基于蚁群算法的路径规划研究[D].南昌航空大学[2024-08-27].DOI:CNKI:CDMD:2.1012.032726.
[3]杨阳.基于蚁群算法的路径规划仿真研究[J].软件, 2022, 43(9):145-149.
🌈4 Matlab代码实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取

















 757
757

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









