






halcon 位姿估计代码
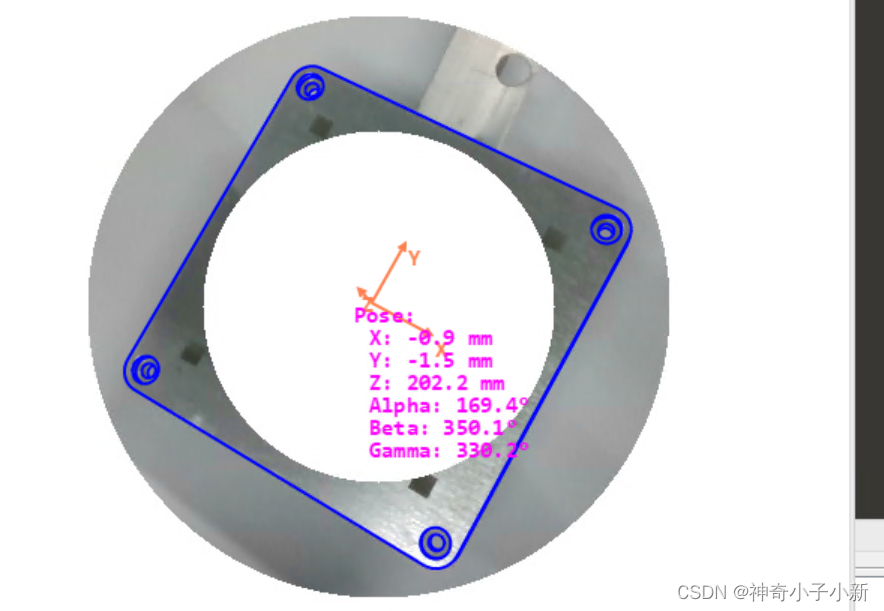
基于形状匹配的位姿估计代码,将位姿以文本形式进行保存。队原始的图像进行了处理,去除纹理信息,保存关键边缘信息。
ReCreateShapeModel3D := false
* delete_file('F:/lb/halcon3d/obj_000003/old_model.sm3')
* ReCreateShapeModel3D := true
* Calibration 01: Code generated by Calibration 01
* CamParam := [0.0163392,-778.343,2.99949e-06,3e-06,925.576,553.982,1920,1080]
* CameraPose := [0.0117945,0.00286742,0.162576,1.37971,355.714,143.877,0]
CamParam := [0.0018522, 0, 3e-6, 3e-6,323.8841552734375, 243.9881591796875,640, 480 ]
Width := 640
Height := 480
dev_close_window ()
dev_open_window (0, 0, Width, Height, 'black', WindowHandle)
set_display_font (WindowHandle, 14, 'mono', 'true', 'false')
dev_update_off ()
read_object_model_3d ('model.ply', 'm', [], [], ObjectModel3DID, DxfStatus)
prepare_object_model_3d (ObjectModel3DID, 'shape_based_matching_3d', 'true', [], [])
list_image_files('', 'bmp', [], ImageFiles)
read_image(Images, ImageFiles)
inspect_object_model_3d (Images, ObjectModel3DID, CamParam, RefRotX, RefRotY, RefRotZ, LongitudeMin, LongitudeMax, LatitudeMin, LatitudeMax, CamRollMin, CamRollMax, DistMin, DistMax, MinFaceAngle)
dev_clear_window ()
if (ReCreateShapeModel3D)
Message := 'Creating the 3D shape model (may take several minutes) ...'
disp_message (WindowHandle, Message, 'window', 12, 12, 'black', 'true')
create_shape_model_3d (ObjectModel3DID, CamParam, RefRotX, RefRotY, RefRotZ, 'gba', LongitudeMin, LongitudeMax, LatitudeMin, LatitudeMax, -rad(180), rad(180), DistMin, DistMax, 10, 'min_face_angle', MinFaceAngle, ShapeModel3DID)
write_shape_model_3d (ShapeModel3DID, 'old_model.sm3')
else
Message := 'Reading the 3D shape model file from disk ...'
disp_message (WindowHandle, Message, 'window', 12, 12, 'black', 'true')
dev_set_check ('~give_error')
dev_error_var (ErrorVar, 1)
read_shape_model_3d ('old_model.sm3', ShapeModel3DID)
Error := ErrorVar
dev_set_check ('give_error')
if (Error != H_MSG_TRUE)
Message := 'Reading the 3D shape model file from disk ... not found!'
Message[1] := 'Creating the 3D shape model (may take several minutes) ...'
disp_message (WindowHandle, Message, 'window', 12, 12, 'black', 'true')
create_shape_model_3d (ObjectModel3DID, CamParam, rad(0), 0, rad(0), 'gba', -rad(180), rad(180), -rad(90), rad(90), rad(0), rad(360), 0.1, 0.3, 10, [], [], ShapeModel3DID)
* create_shape_model_3d (ObjectModel3DID, CamParam, rad(180), 0, rad(90), 'gba', -rad(35), rad(35), -rad(35), rad(35), 0, rad(360), 0.2, 0.25, 10, [], [], ShapeModel3DID)
write_shape_model_3d (ShapeModel3DID, 'old_model.sm3')
endif
read_shape_model_3d ('old_model.sm3', ShapeModel3DID)
endif
dev_set_line_width (2)
list_files('rgb_gaussian','files', Files)
len:=|Files|
for ImageNo := 0 to len-1 by 1
imgname:=Files[ImageNo]
read_image (Image, Files[ImageNo])
dev_display (Image)
count_seconds (Seconds1)
find_shape_model_3d (Image, ShapeModel3DID, 0.9, 0.8, 10, ['num_matches','pose_refinement'], [1,'least_squares_very_high'], Pose, CovPose, Score)
count_seconds (Seconds2)
Time := Seconds2 - Seconds1
Message := |Score| + ' Match(es) found in ' + Time$'4.3f' + ' s'
disp_message (WindowHandle, Message, 'window', 12, 12, 'black', 'true')
Time := Seconds2 - Seconds1
for I := 0 to |Score| - 1 by 1
PoseI := Pose[I * 7:I * 7 + 6]
CovPoseI := CovPose[I * 6:I * 6 + 5]
ScoreI := Score[I]
project_shape_model_3d (ModelContours, ShapeModel3DID, CamParam, PoseI, 'true', 0.523599)
dev_set_color ('blue')
dev_display (ModelContours)
dev_set_color ('coral')
disp_3d_coord_system (WindowHandle, CamParam, PoseI, 0.015)
dev_set_color ('magenta')
display_match_pose (ShapeModel3DID, PoseI, WindowHandle)
pose_to_hom_mat3d(PoseI, HomMat3D)
parse_filename( imgname , BaseName, Extension, Directory)
* if (ImageNo < 10)
* id:='0000'
* elseif (ImageNo>=10 and ImageNo<100)
* id:='000'
* elseif (ImageNo>=100 and ImageNo<1000)
* id:='00'
* elseif (ImageNo>=1000 and ImageNo<10000)
* id:='0'
* elseif (ImageNo>10000)
* id:=''
* endif
open_file ('./poses-martix/'+BaseName+'.txt', 'append', martixFileHandle)
for i:=0 to 11 by 1
fwrite_string (martixFileHandle, HomMat3D[i])
fwrite_string (martixFileHandle, ' ')
endfor
open_file ('./poses-angle/'+BaseName+'.txt', 'append', posesFileHandle)
for j:=0 to |Pose|-2 by 1
fwrite_string (posesFileHandle, PoseI[j])
fwrite_string (posesFileHandle, ' ')
endfor
dump_window_image (Image1, WindowHandle)
write_image (Image1, 'png', 0,'./results/'+BaseName)
endfor
* disp_continue_message (WindowHandle, 'black', 'true')
wait_seconds(10)
endfor
*
Message := 'Program terminated. Press \'Run\' to clear the 3D shape model.'
disp_message (WindowHandle, Message, 'window', Height - 30, 12, 'black', 'true')
*
stop ()
dev_update_on ()















 1022
1022

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









