







一、简介
目标检测可以分为三个类别:通用目标检测(语义分割、全景分割)、突出目标检测和伪装目标检测。
与上一篇文章一样,同样是伪装目标检测,但是取得了更好的效果。
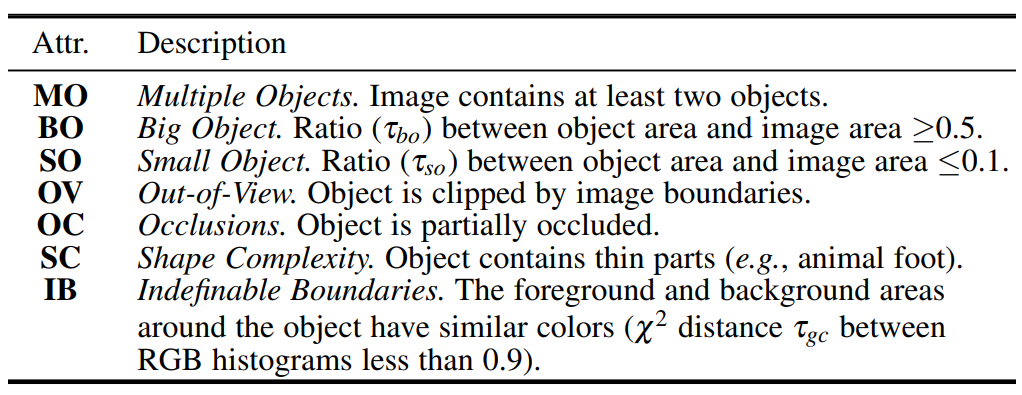
数据集采用COD10k,每张图片采用六种标注:属性(如下表所示)、类别(super-&sub-class)、bounding boxes、object
annotation、instance annotation 和 edge annotation。
较v1增加了neighbor connection decoder(NCD) 和 group-reversal attention (GRA)。
本论文完成的是目标层面的检测,而不是实例分割。
二、模型
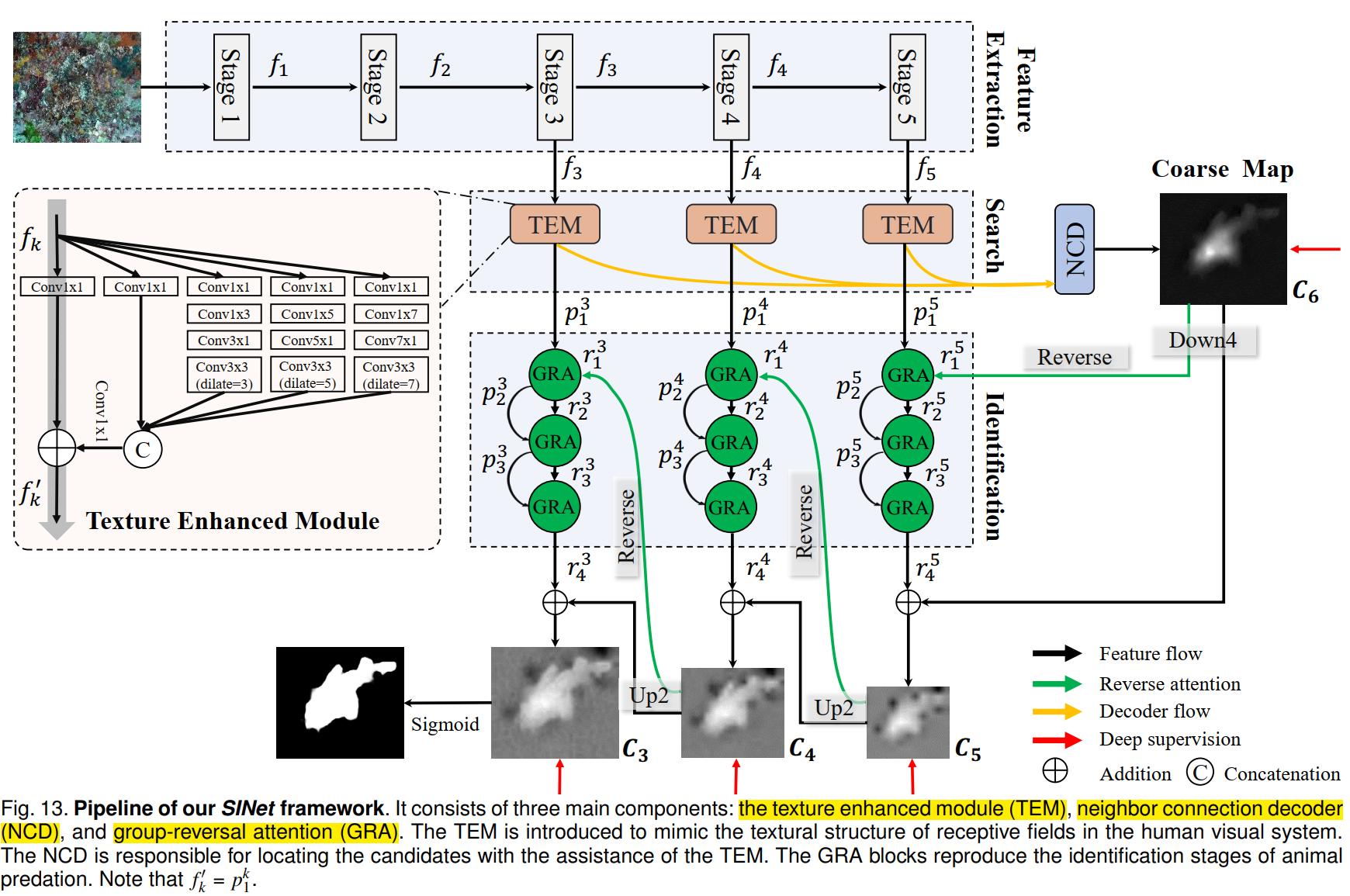
模型分为两个部分:搜索和确认。
2.1 搜索阶段
2.1.1 特征抽取
backbone是res2net50。
2.1.2 Texture Enhanced Module (TEM)
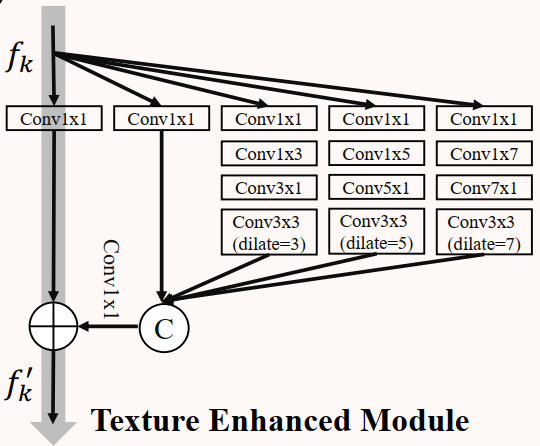
对应代码中的 Receptive Field Block,其中标准的 (2i - 1) x (2i - 1) 大小的卷积操作可以分为 1 x (2i - 1) 和 (2i - 1) x 1 大小的两个连续卷积操作,从而在不减小表征能力的前提下提高推理速度。
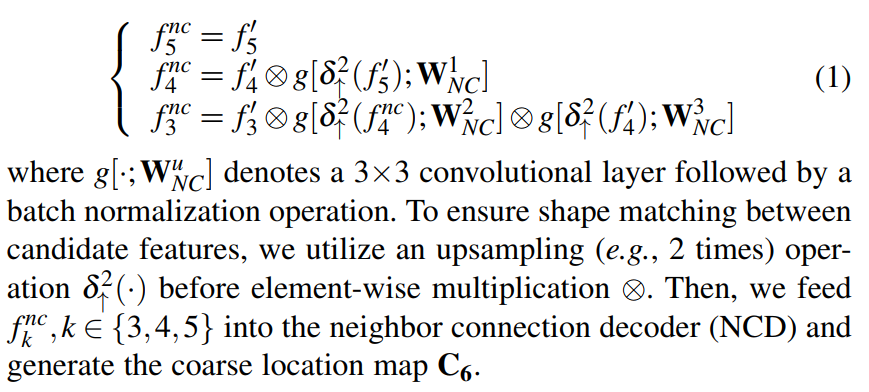
2.1.3 Neighbor Connection Decoder (NCD)
低层级的特征由于更大的空间分辨率,会消耗更多的计算资源,但是表现不佳,本论文采用最后三层特征,而不是将所有特征金字塔送入 NCD 中。
NCD 解决的问题是如何保持同一层内语义的一致性,以及如何在各层之间架起上下文的桥梁。
对送入 NCD 的三层特征再做一次处理,对应如下代码中的 xi_1(i = 1, 2, 3),然后再是 NCD 操作。
def forward(self, x1, x2, x3):
x1_1 = x1 # f5
x2_1 = self.conv_upsample1(self.upsample(x1)) * x2 # f4
x3_1 = self.conv_upsample2(self.upsample(x2_1)) * self.conv_upsample3(self.upsample(x2)) * x3 # f3
x2_2 = torch.cat((x2_1, self.conv_upsample4(self.upsample(x1_1))), 1)
x2_2 = self.conv_concat2(x2_2)
x3_2 = torch.cat((x3_1, self.conv_upsample5(self.upsample(x2_2))), 1)
x3_2 = self.conv_concat3(x3_2)
x = self.conv4(x3_2)
x = self.conv5(x)
return x
2.2 确认阶段
如下代码注释所示,标注了该模型示意图的确认阶段的节点。
# Neighbourhood Connected Decoder
S_g = self.NCD(x4_rfb, x3_rfb, x2_rfb) # C6
S_g_pred = F.interpolate(S_g, scale_factor=8, mode='bilinear') # Sup-1 (bs, 1, 44, 44) -> (bs, 1, 352, 352)
# ---- reverse stage 5 ----
guidance_g = F.interpolate(S_g, scale_factor=0.25, mode='bilinear') # r1,5
ra4_feat = self.RS5(x4_rfb, guidance_g) # r4,5
S_5 = ra4_feat + guidance_g # C5
S_5_pred = F.interpolate(S_5, scale_factor=32, mode='bilinear') # Sup-2 (bs, 1, 11, 11) -> (bs, 1, 352, 352)
# ---- reverse stage 4 ----
guidance_5 = F.interpolate(S_5, scale_factor=2, mode='bilinear') # r1,4
ra3_feat = self.RS4(x3_rfb, guidance_5) # r4,4
S_4 = ra3_feat + guidance_5 # C4
S_4_pred = F.interpolate(S_4, scale_factor=16, mode='bilinear') # Sup-3 (bs, 1, 22, 22) -> (bs, 1, 352, 352)
# ---- reverse stage 3 ----
guidance_4 = F.interpolate(S_4, scale_factor=2, mode='bilinear') # r1,3
ra2_feat = self.RS3(x2_rfb, guidance_4) # r4,3
S_3 = ra2_feat + guidance_4 # C3
S_3_pred = F.interpolate(S_3, scale_factor=8, mode='bilinear') # Sup-4 (bs, 1, 44, 44) -> (bs, 1, 352, 352)
2.2.1 Reverse Guidance
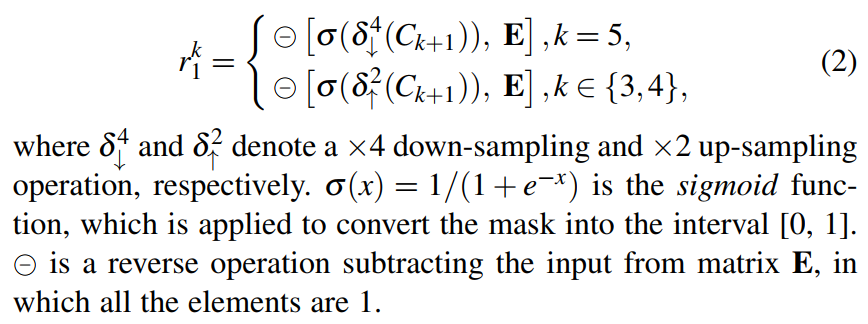
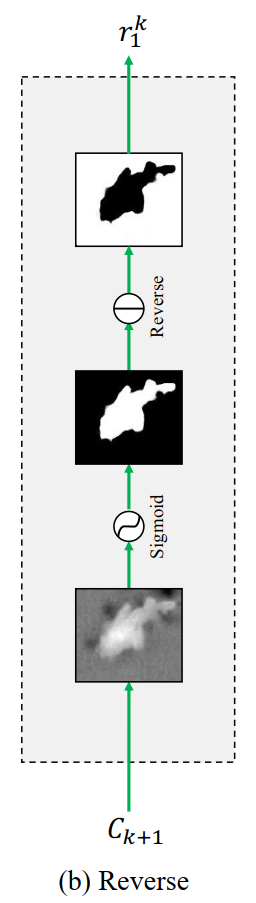
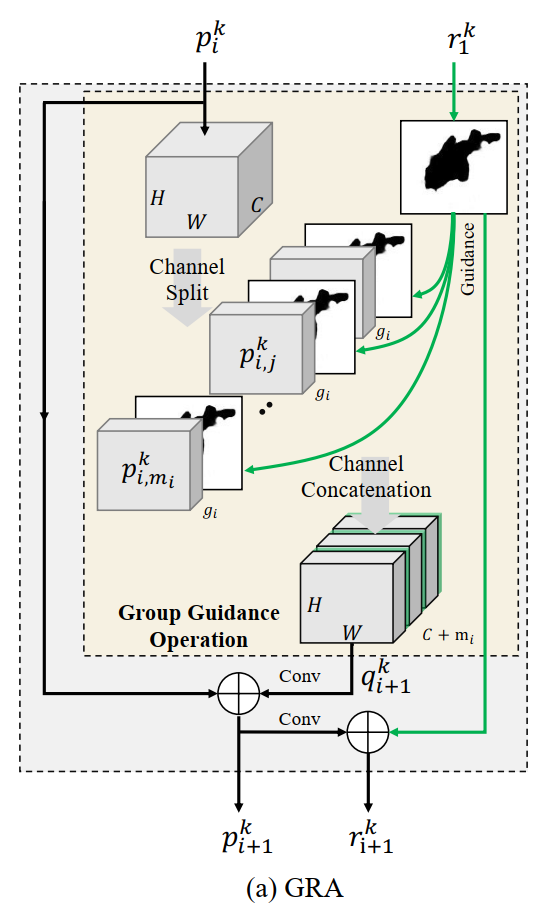
2.2.2 Group-Reversal Attention (GRA)
就是两个 chunk 和 cat 操作。

















 211
211

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









