







一、内容
进行硬件学习。
二、知识点
1.方波有霍尔和无霍尔的相同与区别
(1)相同点
①电源
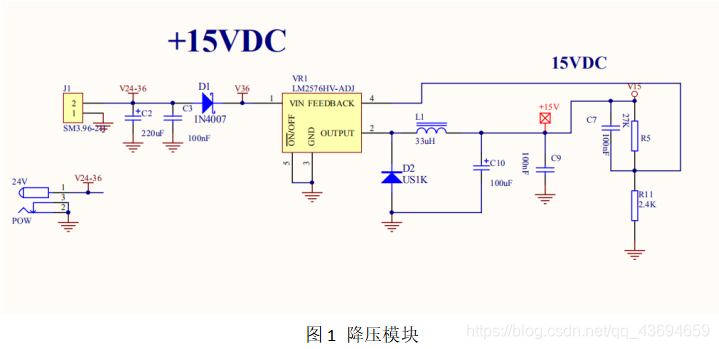
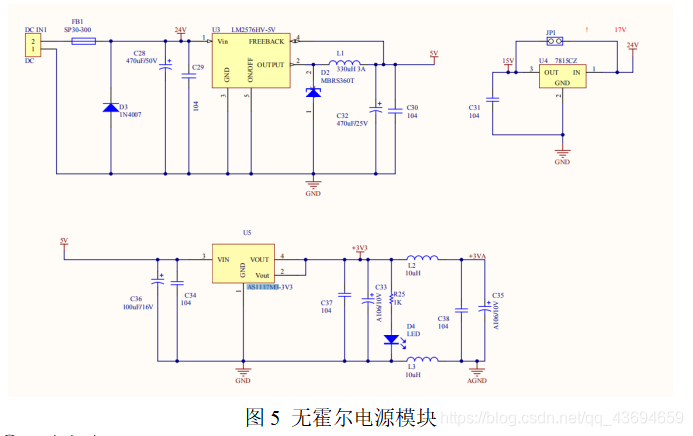
这是一个降压模块,其中最主要的就是LM2576HV-ADJ元器件,它是开关型降压稳压器,共有五个引脚,分别是VIN、ON/OFF、GND、FEEDBACK和OUTPUT,其可调输出电压原理可见下图: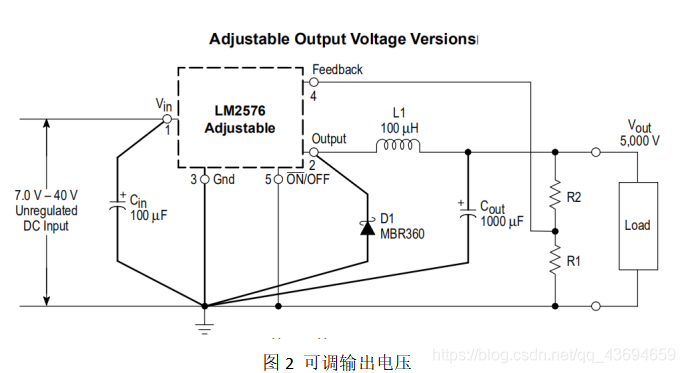
由图1可得:

其中Vref通过查询数据手册可以得知Vref =1.23。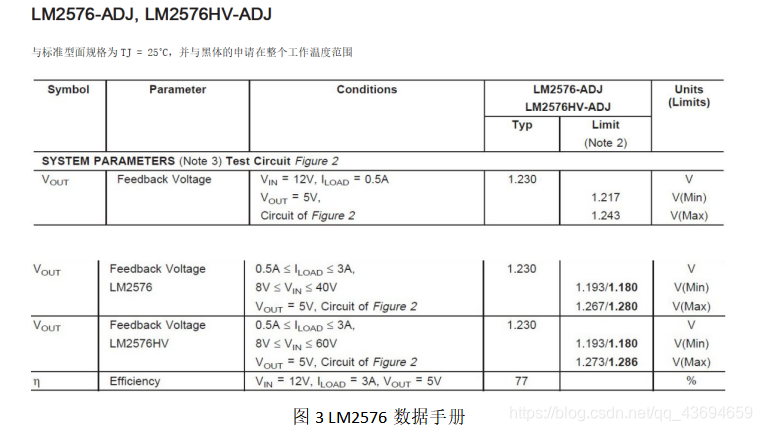
通过计算可以得到:
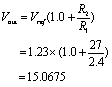
与原理图相符。
同时此模块还用到了IN4007二极管和US1K二极管,前者IN4007二极管单向导电性,可以把方向交替变化的交流电变换成单一方向的脉冲直流电,后者US1K二极管用于开关电源反向吸收(对于电机而言,在刹车时会产生反向电压,即泵升电压,如果太高会烧坏电机的控制器)。此外,电路上的滤波电容能有效的滤除交流成分,使得输出直流更加平滑。
在方波有霍尔的原理图中,共有三个以LM2576为核心的降压模块,分别实现了将+36V电压转换为+15V,将+15V的电压转换为+12V,将+12V的电压转换为+5V的VCC。
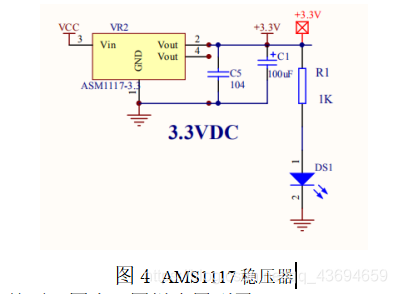
最后还使用了AMS1117正向低压降稳压器,实现+5V的电压转换为+3.3V如图所示:
②驱动电路
在方波有霍尔和无霍尔的原理图中,最重要的就是这个IR2136驱动芯片了,他是专用IGBT和MOSFET驱动集成芯片。
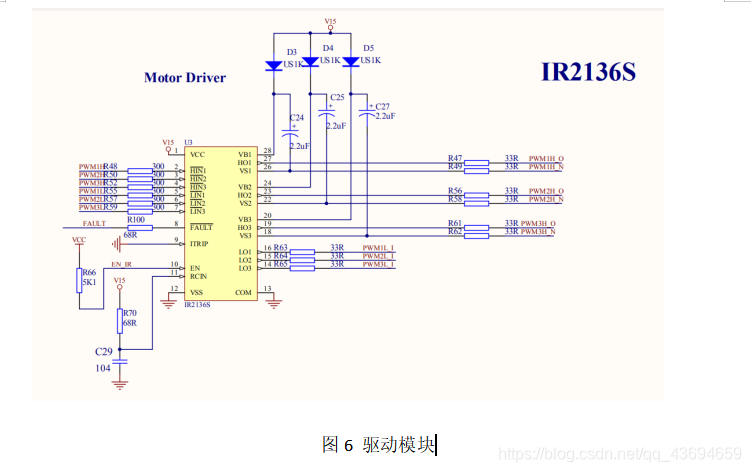
其中VCC引脚是电源输入端,可以为低侧提供电源,还可为内部逻辑电路供电,HIN为高侧门极驱动逻辑输入引脚,低电平有效,经过施密特触发器、电平转换、滤波、放大等通道,最后驱动上桥臂MOS管,LIN为低侧门极驱动逻辑输入引脚,驱动下桥臂MOS管。HO,LO对应高低侧门极驱动输出。VB为高压侧基极浮动电压输出端。VS为高压侧浮动射极输出端。ITRIP是过流检测引脚,FAULT是故障输出引脚。
通过原理图我们可以得知,IR2136驱动芯片后续接的是是IRF540,也就是N型MOS管。
同时通过原理图可以发现,高侧MOS管Q1,Q3,Q5漏极接高压,源极接负载,若想高侧MOS管饱和导通,则栅极驱动电压必须浮置在源极电压之上。
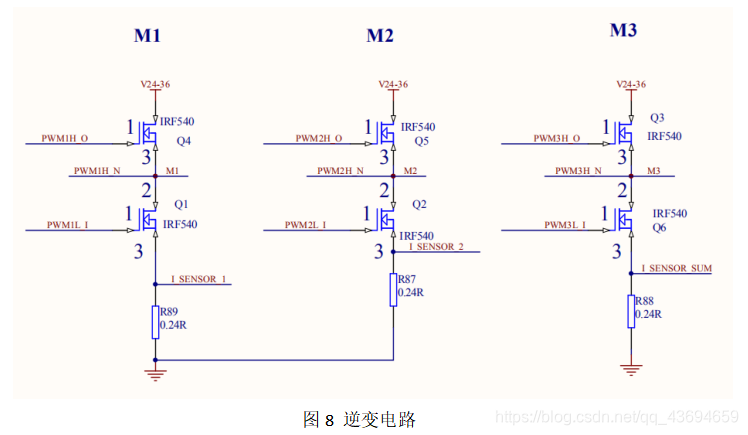
这时需要在外部增加一个自举电路,给IR2136的VB和VS两端供电,驱动功率管栅极导通。一般MOS管的栅源导通电压为10~15 V,这里选择15 V供电电源。低侧MOS管因源极接地,驱动方法比较简单,可由驱动芯片15 V电源直接驱动栅极。
同时IR2136内置了400ns的死区时间,防止同一桥臂的上下2个MOS管同时导通。
自举电路是由自举电容和自举二极管组成,如下图所示:
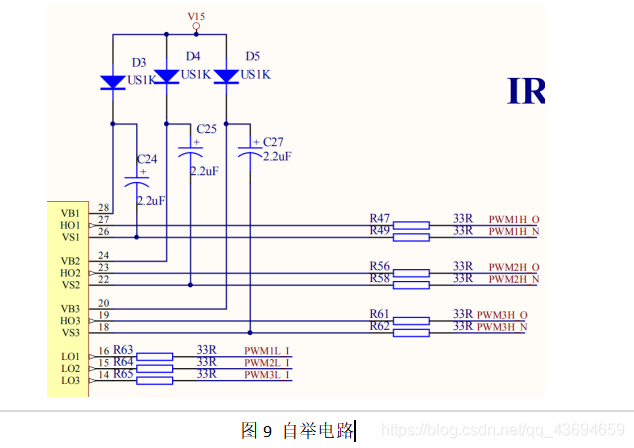
在逆变驱动电路中,也正是通过自举电路来实现高低测MOS管交替导通,对于一组高低MOS而言,当高侧MOS管关闭,低侧MOS管导通时,对应的VS引脚电位为低侧MOS管的饱和压降,基本为低电位,此时15V的电源正通过自举二极管US1K给自举电容充电;而当低侧MOS管关闭,高侧MOS管导通时,自举电容放电,给高侧MOS管提供饱和导通的电压。而这里也是由于MOS管工作频率较高,充放电时间较短,自举电容向电源的电荷回馈会使得电荷损失,所以选择的是快恢复二极管。
同时,由于栅源之间的阻抗很高,因此漏源间电压的突变会通过极间电容耦合到栅极而产生过高的电压过冲。对于正方向的过冲电压,会引起 MOSFET 误导通,导致桥臂直通。 因此,为了适当降低栅极驱动电路的阻抗,可以在栅源间并联一电阻。
(2)区别
提到区别,就先要理清有霍尔和无霍尔的工作原理的区别。有霍尔是通过霍尔传感器来获得转子的位置信息,再根据转子的位置信息以及PWM控制信号和方向信号来实现电机的换相;而对于无霍尔电机来说,转子的位置信息的获取方法变成了反电动势法。
有霍尔:

右侧电路由电阻和电感组成了一个RC低通滤波器,目的是为了去抖消除噪声。
无霍尔:
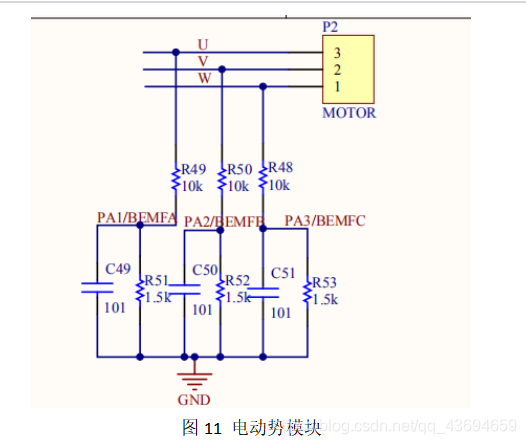
由于电机的电动势过大,所以需要对电机的电动势进行降压处理,这里可以看见R49、R50和R48的阻值要远大于R51R52和R53。同时和电容一起,也对得到的信号进行过滤处理。
2.正弦波与方波的硬件区别
从原理上来研究,方波控制原理可以简单的理解为主要对两个量来进行控制,一个是电机转子位置对应的开管状态,有HALL传感器的时候,可以通过HALL来获得转子位置信息,无HALL传感器的时候,通过反电动势来获得转子位置信息;另一个是PWM占空比的控制,通过控制占空比的大小来控制电流的大小,从而控制转矩和转速。
由于所学程序的方波有霍尔是开环控制,并没有用到电流环和速度环,也就是驱动器通过调制MOS的占波频率的占空比来调节电机功率输出,所以其中对于方波而言,无霍尔比有霍尔的多一个电动势的采样电路。
也就是对于方波有霍尔而言,只需要得三个霍尔传感器的状态;而对于无霍尔传感器而言,只需要得到三相的电动势。
而对于正弦波而言,由于是采用FOC控制原理,那么就需要对定子电流进行采样,获得ia、ib,再进行Park和Clark变换。
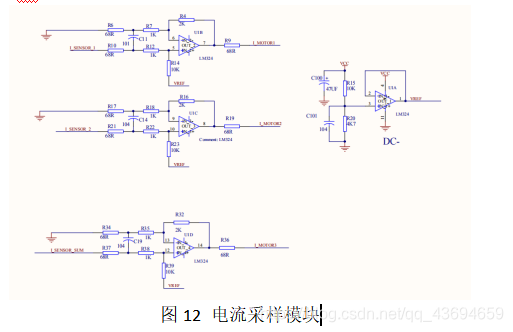
三相电流分别通过检流电阻R89、R88和R87到地,通过检测检流电阻上的电压降,就可以获得电机工作时的电流。由于R89、R88和R87的阻止都较小(为了避免不必要的功率和热量损耗),所以需要通过放大电路再输入到MCU上,进行ADC转换。这也是运放LM324在这里的作用。
同时也可以换一种运放,电路如下图所示:
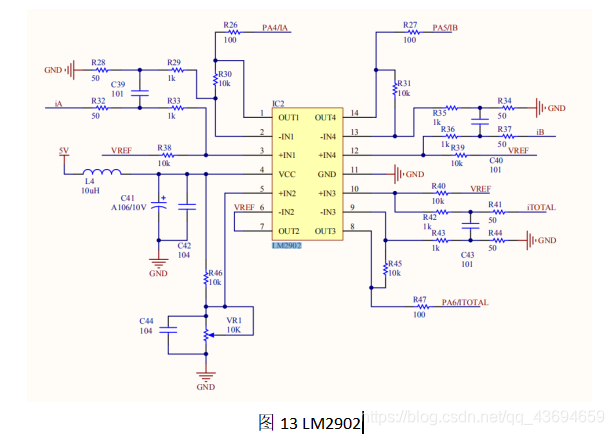
原理和有感的相同,只不过用一个LM2902代替了上面的多个LM324。实现功能和方法是一样的。
这也是最主要的正弦波和方波的硬件的区别了
这里在之前的方波的有霍尔和无霍尔程序中也提到了这个模块,但是在程序中,方波的有霍尔和无霍尔均没有用到这个模块,因为对于所学的方波程序而言,有霍尔和无霍尔的都只是简单的开环控制,并没有用到电流环和速度环,也就导致了方波有霍尔和无霍尔的程序中没有用到对定子电流和转子速度的测量。
另外,对于正弦波的有霍尔和无霍尔的硬件差别,是和方波的差别一样的,应为正弦波的无霍尔和方波的无霍尔都是利用反电动势法进行测量的,不同的是他们程序的实现方法
在正弦波有霍尔程序中,与方波有霍尔不同的是,正弦波的程序还利用HALL进行计算电角度和机械角度等信息。
HALL位置信息的获取:
u8 ReadHallState(void)
{
u8 ReadValue;
#if defined(TIMER3_HANDLES_HALL)
ReadValue = GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_6);
ReadValue |= GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_7)<<1;
ReadValue |= GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_8)<<2;
ReadValue &=GPIO_MSK;
#endif
return(ReadValue);
}
其中,PC6,PC7和PC8就是了解到HALL的引脚

同时,再利用HALL_GetRotorFreq,HALL_GetRotorFreq 和HALL_GetElectricalAngle等函数实现对转子的电频率,机械频率和电角度等信息的获得。
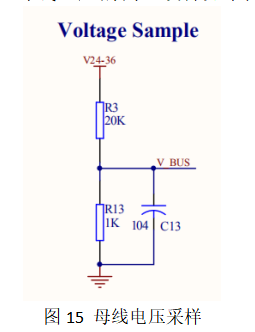
而在正弦波的无霍尔程序中,与方波无霍尔程序相比,也需要得到转子的位置,角度和速度等信息,所以和方波无霍尔的硬件相比,除了三相的电动势,正弦波的程序还利用到了定子电流和母线电压,定子电流在坐标系转换中也用到了,这里不需要再另行添加,母线电压的测量硬件如下图所示:
三、学习总结
总的来说,正弦波由于需要进行坐标系的转换,所以需要用到定子的电流,同时增加的电流环和速度环,也使得在程序中需要计算的信息变得更多。

















 9626
9626

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









