









CVT代码
看一下整体框架的编写,删除掉了初始化等操作,精简代码。
from functools import partial
from itertools import repeat
from torch._six import container_abcs
import logging
import os
from collections import OrderedDict
import numpy as np
import scipy
import torch
import torch.nn as nn
import torch.nn.functional as F
from einops import rearrange
from einops.layers.torch import Rearrange
from timm.models.layers import DropPath, trunc_normal_
from .registry import register_model
class LayerNorm(nn.LayerNorm):
"""Subclass torch's LayerNorm to handle fp16."""
def forward(self, x: torch.Tensor):
orig_type = x.dtype
ret = super().forward(x.type(torch.float32))
return ret.type(orig_type)
class QuickGELU(nn.Module):
def forward(self, x: torch.Tensor):
return x * torch.sigmoid(1.702 * x)
class Mlp(nn.Module):
def __init__(self,
in_features,
hidden_features=None,
out_features=None,
act_layer=nn.GELU,
drop=0.):
super().__init__()
out_features = out_features or in_features
hidden_features = hidden_features or in_features
self.fc1 = nn.Linear(in_features, hidden_features)
self.act = act_layer()
self.fc2 = nn.Linear(hidden_features, out_features)
self.drop = nn.Dropout(drop)
def forward(self, x):
x = self.fc1(x)
x = self.act(x)
x = self.drop(x)
x = self.fc2(x)
x = self.drop(x)
return x
class Attention(nn.Module):
def __init__(self,
dim_in,
dim_out,
num_heads,
qkv_bias=False,
attn_drop=0.,
proj_drop=0.,
method='dw_bn',
kernel_size=3,
stride_kv=1,
stride_q=1,
padding_kv=1,
padding_q=1,
with_cls_token=True,
**kwargs
):
super().__init__()
self.stride_kv = stride_kv
self.stride_q = stride_q
self.dim = dim_out
self.num_heads = num_heads
# head_dim = self.qkv_dim // num_heads
self.scale = dim_out ** -0.5
self.with_cls_token = with_cls_token
self.conv_proj_q = self._build_projection(
dim_in, dim_out, kernel_size, padding_q,
stride_q, 'linear' if method == 'avg' else method
)
self.conv_proj_k = self._build_projection(
dim_in, dim_out, kernel_size, padding_kv,
stride_kv, method
)
self.conv_proj_v = self._build_projection(
dim_in, dim_out, kernel_size, padding_kv,
stride_kv, method
)
self.proj_q = nn.Linear(dim_in, dim_out, bias=qkv_bias)
self.proj_k = nn.Linear(dim_in, dim_out, bias=qkv_bias)
self.proj_v = nn.Linear(dim_in, dim_out, bias=qkv_bias)
self.attn_drop = nn.Dropout(attn_drop)
self.proj = nn.Linear(dim_out, dim_out)
self.proj_drop = nn.Dropout(proj_drop)
def _build_projection(self,
dim_in,
dim_out,
kernel_size,
padding,
stride,
method):
if method == 'dw_bn':
proj = nn.Sequential(OrderedDict([
('conv', nn.Conv2d(
dim_in,
dim_in,
kernel_size=kernel_size,
padding=padding,
stride=stride,
bias=False,
groups=dim_in
)),
('bn', nn.BatchNorm2d(dim_in)),
('rearrage', Rearrange('b c h w -> b (h w) c')),
]))
elif method == 'avg':
proj = nn.Sequential(OrderedDict([
('avg', nn.AvgPool2d(
kernel_size=kernel_size,
padding=padding,
stride=stride,
ceil_mode=True
)),
('rearrage', Rearrange('b c h w -> b (h w) c')),
]))
elif method == 'linear':
proj = None
else:
raise ValueError('Unknown method ({})'.format(method))
return proj
def forward_conv(self, x, h, w):
if self.with_cls_token:
cls_token, x = torch.split(x, [1, h*w], 1)
x = rearrange(x, 'b (h w) c -> b c h w', h=h, w=w)
if self.conv_proj_q is not None:
q = self.conv_proj_q(x)
else:
q = rearrange(x, 'b c h w -> b (h w) c')
if self.conv_proj_k is not None:
k = self.conv_proj_k(x)
else:
k = rearrange(x, 'b c h w -> b (h w) c')
if self.conv_proj_v is not None:
v = self.conv_proj_v(x)
else:
v = rearrange(x, 'b c h w -> b (h w) c')
if self.with_cls_token:
q = torch.cat((cls_token, q), dim=1)
k = torch.cat((cls_token, k), dim=1)
v = torch.cat((cls_token, v), dim=1)
return q, k, v
def forward(self, x, h, w):
if (
self.conv_proj_q is not None
or self.conv_proj_k is not None
or self.conv_proj_v is not None
):
q, k, v = self.forward_conv(x, h, w)
q = rearrange(self.proj_q(q), 'b t (h d) -> b h t d', h=self.num_heads)
k = rearrange(self.proj_k(k), 'b t (h d) -> b h t d', h=self.num_heads)
v = rearrange(self.proj_v(v), 'b t (h d) -> b h t d', h=self.num_heads)
attn_score = torch.einsum('bhlk,bhtk->bhlt', [q, k]) * self.scale
attn = F.softmax(attn_score, dim=-1)
attn = self.attn_drop(attn)
x = torch.einsum('bhlt,bhtv->bhlv', [attn, v])
x = rearrange(x, 'b h t d -> b t (h d)')
x = self.proj(x)
x = self.proj_drop(x)
return x
class Block(nn.Module):
def __init__(self,
dim_in,
dim_out,
num_heads,
mlp_ratio=4.,
qkv_bias=False,
drop=0.,
attn_drop=0.,
drop_path=0.,
act_layer=nn.GELU,
norm_layer=nn.LayerNorm,
**kwargs):
super().__init__()
self.with_cls_token = kwargs['with_cls_token']
self.norm1 = norm_layer(dim_in)
self.attn = Attention(
dim_in, dim_out, num_heads, qkv_bias, attn_drop, drop,
**kwargs
)
self.drop_path = DropPath(drop_path) \
if drop_path > 0. else nn.Identity()
self.norm2 = norm_layer(dim_out)
dim_mlp_hidden = int(dim_out * mlp_ratio)
self.mlp = Mlp(
in_features=dim_out,
hidden_features=dim_mlp_hidden,
act_layer=act_layer,
drop=drop
)
def forward(self, x, h, w):
res = x
x = self.norm1(x)
attn = self.attn(x, h, w)
x = res + self.drop_path(attn)
x = x + self.drop_path(self.mlp(self.norm2(x)))
return x
class ConvEmbed(nn.Module):
""" Image to Conv Embedding
"""
def __init__(self,
patch_size=7,
in_chans=3,
embed_dim=64,
stride=4,
padding=2,
norm_layer=None):
super().__init__()
patch_size = to_2tuple(patch_size)
self.patch_size = patch_size
self.proj = nn.Conv2d(
in_chans, embed_dim,
kernel_size=patch_size,
stride=stride,
padding=padding
)
self.norm = norm_layer(embed_dim) if norm_layer else None
def forward(self, x):
x = self.proj(x)
B, C, H, W = x.shape
x = rearrange(x, 'b c h w -> b (h w) c')
if self.norm:
x = self.norm(x)
x = rearrange(x, 'b (h w) c -> b c h w', h=H, w=W)
return x
class VisionTransformer(nn.Module):
""" Vision Transformer with support for patch or hybrid CNN input stage
"""
def __init__(self,
patch_size=16,
patch_stride=16,
patch_padding=0,
in_chans=3,
embed_dim=768,
depth=12,
num_heads=12,
mlp_ratio=4.,
qkv_bias=False,
drop_rate=0.,
attn_drop_rate=0.,
drop_path_rate=0.,
act_layer=nn.GELU,
norm_layer=nn.LayerNorm,
init='trunc_norm',
**kwargs):
super().__init__()
self.num_features = self.embed_dim = embed_dim # num_features for consistency with other models
self.rearrage = None
self.patch_embed = ConvEmbed(
# img_size=img_size,
patch_size=patch_size,
in_chans=in_chans,
stride=patch_stride,
padding=patch_padding,
embed_dim=embed_dim,
norm_layer=norm_layer
)
with_cls_token = kwargs['with_cls_token']
if with_cls_token:
self.cls_token = nn.Parameter(
torch.zeros(1, 1, embed_dim)
)
else:
self.cls_token = None
self.pos_drop = nn.Dropout(p=drop_rate)
dpr = [x.item() for x in torch.linspace(0, drop_path_rate, depth)] # stochastic depth decay rule
blocks = []
for j in range(depth):
blocks.append(
Block(
dim_in=embed_dim,
dim_out=embed_dim,
num_heads=num_heads,
mlp_ratio=mlp_ratio,
qkv_bias=qkv_bias,
drop=drop_rate,
attn_drop=attn_drop_rate,
drop_path=dpr[j],
act_layer=act_layer,
norm_layer=norm_layer,
**kwargs
)
)
self.blocks = nn.ModuleList(blocks)
def forward(self, x):
x = self.patch_embed(x)
B, C, H, W = x.size()
x = rearrange(x, 'b c h w -> b (h w) c')
cls_tokens = None
if self.cls_token is not None:
# stole cls_tokens impl from Phil Wang, thanks
cls_tokens = self.cls_token.expand(B, -1, -1)
x = torch.cat((cls_tokens, x), dim=1)
x = self.pos_drop(x)
for i, blk in enumerate(self.blocks):
x = blk(x, H, W)
if self.cls_token is not None:
cls_tokens, x = torch.split(x, [1, H*W], 1)
x = rearrange(x, 'b (h w) c -> b c h w', h=H, w=W)
return x, cls_tokens
class ConvolutionalVisionTransformer(nn.Module):
def __init__(self,
in_chans=3,
num_classes=1000,
act_layer=nn.GELU,
norm_layer=nn.LayerNorm,
init='trunc_norm',
spec=None):
super().__init__()
self.num_classes = num_classes
self.num_stages = spec['NUM_STAGES'] #3
for i in range(self.num_stages):
kwargs = {
'patch_size': spec['PATCH_SIZE'][i],
'patch_stride': spec['PATCH_STRIDE'][i],
'patch_padding': spec['PATCH_PADDING'][i],
'embed_dim': spec['DIM_EMBED'][i],
'depth': spec['DEPTH'][i],
'num_heads': spec['NUM_HEADS'][i],
'mlp_ratio': spec['MLP_RATIO'][i],
'qkv_bias': spec['QKV_BIAS'][i],
'drop_rate': spec['DROP_RATE'][i],
'attn_drop_rate': spec['ATTN_DROP_RATE'][i],
'drop_path_rate': spec['DROP_PATH_RATE'][i],
'with_cls_token': spec['CLS_TOKEN'][i],
'method': spec['QKV_PROJ_METHOD'][i],
'kernel_size': spec['KERNEL_QKV'][i],
'padding_q': spec['PADDING_Q'][i],
'padding_kv': spec['PADDING_KV'][i],
'stride_kv': spec['STRIDE_KV'][i],
'stride_q': spec['STRIDE_Q'][i],
}
stage = VisionTransformer(
in_chans=in_chans,
init=init,
act_layer=act_layer,
norm_layer=norm_layer,
**kwargs
)
setattr(self, f'stage{i}', stage)#用于设置属性值
in_chans = spec['DIM_EMBED'][i]
dim_embed = spec['DIM_EMBED'][-1]
self.norm = norm_layer(dim_embed)
self.cls_token = spec['CLS_TOKEN'][-1]
# Classifier head
self.head = nn.Linear(dim_embed, num_classes) if num_classes > 0 else nn.Identity()
trunc_normal_(self.head.weight, std=0.02)
@torch.jit.ignore
def no_weight_decay(self):
layers = set()
for i in range(self.num_stages):
layers.add(f'stage{i}.pos_embed')
layers.add(f'stage{i}.cls_token')
return layers
def forward_features(self, x):
for i in range(self.num_stages):
x, cls_tokens = getattr(self, f'stage{i}')(x) #getattr返回一个对象 属性对应的值
#x,cls_tokens = getattr(self,stage(i))(x)
if self.cls_token:
x = self.norm(cls_tokens)
x = torch.squeeze(x)
else:
x = rearrange(x, 'b c h w -> b (h w) c')
x = self.norm(x)
x = torch.mean(x, dim=1)
return x
def forward(self, x):
x = self.forward_features(x)
x = self.head(x)
return x
@register_model
def get_cls_model(config, **kwargs):
msvit_spec = config.MODEL.SPEC
msvit = ConvolutionalVisionTransformer(
in_chans=3,
num_classes=config.MODEL.NUM_CLASSES,
act_layer=QuickGELU,
norm_layer=partial(LayerNorm, eps=1e-5),
init=getattr(msvit_spec, 'INIT', 'trunc_norm'),
spec=msvit_spec
)
if config.MODEL.INIT_WEIGHTS:
msvit.init_weights(
config.MODEL.PRETRAINED,
config.MODEL.PRETRAINED_LAYERS,
config.VERBOSE
)
return msvit
模型的细节配置在yaml文件中:

1:我们进入ConvolutionalVisionTransformer类的forward中,numstage=3,这里有个getattr函数。
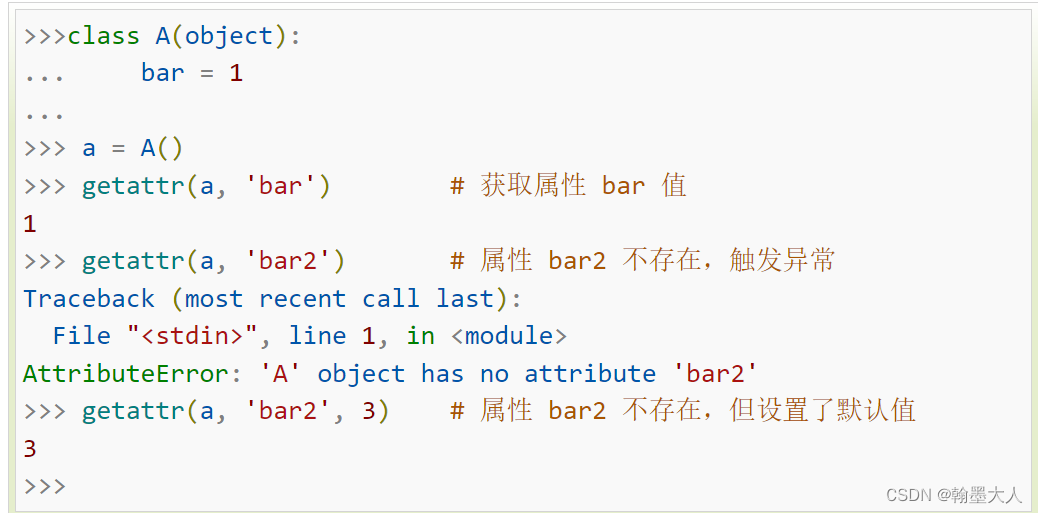
getattr:返回对象属性值。返回对象a的bar属性对应的值为1。
在代码中:x, cls_tokens = getattr(self, f'stage{i}')(x) 返回self对象stage{i}对应的属性值。
其中self即对ConvolutionalVisionTransformer实例化的对象,stage属性对应的为VisionTransformer。即相当于x经过VisionTransformer。
2:在VisionTransformer中。

2.1:首先进行patchembed。我们的参数为yaml中对应的参数而非默认的参数。

class ConvEmbed(nn.Module):
""" Image to Conv Embedding
"""
def __init__(self,
patch_size=7,
in_chans=3,
embed_dim=64,
stride=4,
padding=2,
norm_layer=None):
super().__init__()
patch_size = to_2tuple(patch_size)
self.patch_size = patch_size
self.proj = nn.Conv2d(
in_chans, embed_dim,
kernel_size=patch_size,
stride=stride,
padding=padding
)
self.norm = norm_layer(embed_dim) if norm_layer else None
def forward(self, x):
x = self.proj(x)
B, C, H, W = x.shape
x = rearrange(x, 'b c h w -> b (h w) c')
if self.norm:
x = self.norm(x)
x = rearrange(x, 'b (h w) c -> b c h w', h=H, w=W)
return x
我们x的大小为(1,3,224,224),进过一个输出为64,kernel=7,stride=4,padding=2的卷积,大小变为(1,64,56,56)。然后reshape为(1,3136,64)。然后对第三维度进行layernorm。再将序列reshape回原图片(1,64,56,56)。
接着再将图片reshape为(1,3136,64),进行dropout。然后遍历block。
for i, blk in enumerate(self.blocks):
x = blk(x, H, W)
我们跳到block中,首先是depth,在第一个阶段是1,第二个为4,第三个为16。

for j in range(depth):
blocks.append(
Block(
dim_in=embed_dim, #64
dim_out=embed_dim,#64
num_heads=num_heads,#1
mlp_ratio=mlp_ratio,#4
qkv_bias=qkv_bias,#true
drop=drop_rate,#0
attn_drop=attn_drop_rate,#0
drop_path=dpr[j],#0
act_layer=act_layer,#gelu
norm_layer=norm_layer,#ln
**kwargs
)
)
self.blocks = nn.ModuleList(blocks)
我们到block中,H,W为x进过patchemb之后的大小(56,56)。x接着经过attention模块。
class Attention(nn.Module):
def __init__(self,
dim_in,
dim_out,
num_heads,
qkv_bias=False,
attn_drop=0.,
proj_drop=0.,
method='dw_bn',
kernel_size=3,
stride_kv=1,
stride_q=1,
padding_kv=1,
padding_q=1,
with_cls_token=True,
**kwargs
):
super().__init__()
self.stride_kv = stride_kv
self.stride_q = stride_q
self.dim = dim_out
self.num_heads = num_heads
# head_dim = self.qkv_dim // num_heads
self.scale = dim_out ** -0.5
self.with_cls_token = with_cls_token
self.conv_proj_q = self._build_projection(
dim_in, dim_out, kernel_size, padding_q,
stride_q, 'linear' if method == 'avg' else method
)
self.conv_proj_k = self._build_projection(
dim_in, dim_out, kernel_size, padding_kv,
stride_kv, method
)
self.conv_proj_v = self._build_projection(
dim_in, dim_out, kernel_size, padding_kv,
stride_kv, method
)
self.proj_q = nn.Linear(dim_in, dim_out, bias=qkv_bias)
self.proj_k = nn.Linear(dim_in, dim_out, bias=qkv_bias)
self.proj_v = nn.Linear(dim_in, dim_out, bias=qkv_bias)
self.attn_drop = nn.Dropout(attn_drop)
self.proj = nn.Linear(dim_out, dim_out)
self.proj_drop = nn.Dropout(proj_drop)
def _build_projection(self,
dim_in,
dim_out,
kernel_size,
padding,
stride,
method):
if method == 'dw_bn':
proj = nn.Sequential(OrderedDict([
('conv', nn.Conv2d(
dim_in,
dim_in,
kernel_size=kernel_size,
padding=padding,
stride=stride,
bias=False,
groups=dim_in
)),
('bn', nn.BatchNorm2d(dim_in)),
('rearrage', Rearrange('b c h w -> b (h w) c')),
]))
elif method == 'avg':
proj = nn.Sequential(OrderedDict([
('avg', nn.AvgPool2d(
kernel_size=kernel_size,
padding=padding,
stride=stride,
ceil_mode=True
)),
('rearrage', Rearrange('b c h w -> b (h w) c')),
]))
elif method == 'linear':
proj = None
else:
raise ValueError('Unknown method ({})'.format(method))
return proj
def forward_conv(self, x, h, w):
if self.with_cls_token:
cls_token, x = torch.split(x, [1, h*w], 1)
x = rearrange(x, 'b (h w) c -> b c h w', h=h, w=w)
if self.conv_proj_q is not None:
q = self.conv_proj_q(x)
else:
q = rearrange(x, 'b c h w -> b (h w) c')
if self.conv_proj_k is not None:
k = self.conv_proj_k(x)
else:
k = rearrange(x, 'b c h w -> b (h w) c')
if self.conv_proj_v is not None:
v = self.conv_proj_v(x)
else:
v = rearrange(x, 'b c h w -> b (h w) c')
if self.with_cls_token:
q = torch.cat((cls_token, q), dim=1)
k = torch.cat((cls_token, k), dim=1)
v = torch.cat((cls_token, v), dim=1)
return q, k, v
def forward(self, x, h, w):
if (
self.conv_proj_q is not None
or self.conv_proj_k is not None
or self.conv_proj_v is not None
):
q, k, v = self.forward_conv(x, h, w)
q = rearrange(self.proj_q(q), 'b t (h d) -> b h t d', h=self.num_heads)
k = rearrange(self.proj_k(k), 'b t (h d) -> b h t d', h=self.num_heads)
v = rearrange(self.proj_v(v), 'b t (h d) -> b h t d', h=self.num_heads)
attn_score = torch.einsum('bhlk,bhtk->bhlt', [q, k]) * self.scale
attn = F.softmax(attn_score, dim=-1)
attn = self.attn_drop(attn)
x = torch.einsum('bhlt,bhtv->bhlv', [attn, v])
x = rearrange(x, 'b h t d -> b t (h d)')
x = self.proj(x)
x = self.proj_drop(x)
return x
首先生成qkv,如果带有classtoken就将其从维度分离出去。再将x reshape为图片大小,接着进行卷积操作来生成qkv。
我们进入到_build_projection函数中:根据yaml文件,method == ‘dw_bn’,所以proj就是一个由有序字典组成的序列。字典包含卷积,bn,和将图片再转换为序列。主要看一下卷积:
def _build_projection(self,
dim_in,
dim_out,
kernel_size,
padding,
stride,
method):
if method == 'dw_bn':
proj = nn.Sequential(OrderedDict([
('conv', nn.Conv2d(
dim_in,
dim_in,
kernel_size=kernel_size,
padding=padding,
stride=stride,
bias=False,
groups=dim_in
)),
('bn', nn.BatchNorm2d(dim_in)),
('rearrage', Rearrange('b c h w -> b (h w) c')),
]))
elif method == 'avg':
proj = nn.Sequential(OrderedDict([
('avg', nn.AvgPool2d(
kernel_size=kernel_size,
padding=padding,
stride=stride,
ceil_mode=True
)),
('rearrage', Rearrange('b c h w -> b (h w) c')),
]))
elif method == 'linear':
proj = None
else:
raise ValueError('Unknown method ({})'.format(method))
return proj
主要看一下卷积:卷积大小为3,步长为1,padding=1,group=dim_in,这个就是逐通道卷积。
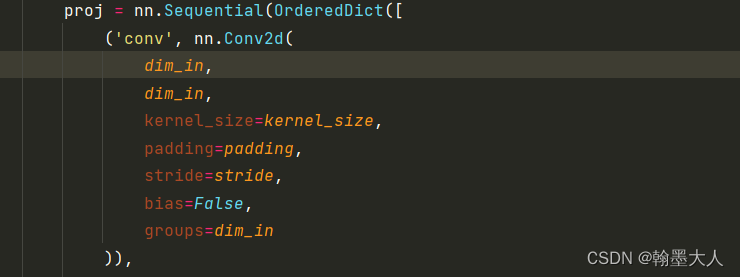
对应于原图中的:
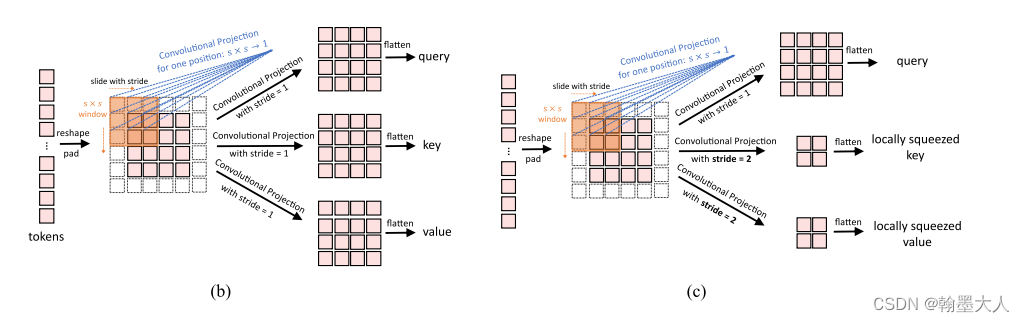
同理生成q和v。在将刚才分离的classtoken在维度上拼接起来。return q, k, v。
接着:q, k, v经过proj,对应于:
q = rearrange(self.proj_q(q), 'b t (h d) -> b h t d', h=self.num_heads)
k = rearrange(self.proj_k(k), 'b t (h d) -> b h t d', h=self.num_heads)
v = rearrange(self.proj_v(v), 'b t (h d) -> b h t d', h=self.num_heads)
self.proj_q = nn.Linear(dim_in, dim_out, bias=qkv_bias)
self.proj_k = nn.Linear(dim_in, dim_out, bias=qkv_bias)
self.proj_v = nn.Linear(dim_in, dim_out, bias=qkv_bias)
注:在原文中作者使用的深度可分离卷积来代替传统的投射,而这里的线性投射相当于深度可分离卷积中的逐点卷积。
接着:q和k进行矩阵相乘再与v相乘,和普通的transformer一样,在经过一个线性层和dropout得到最终的x。
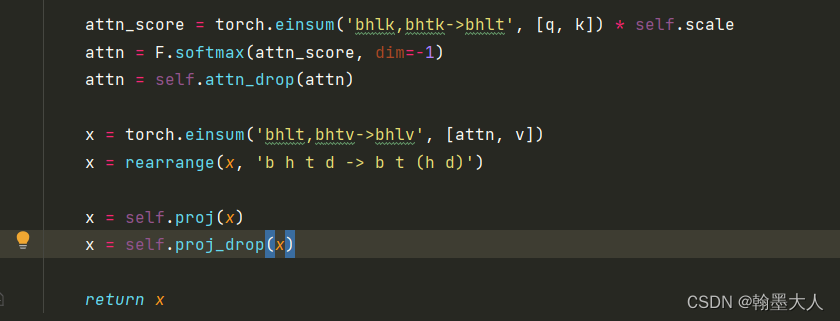
这样attention计算完毕。
与原始的x相加再进过mlp得到最终的输出。
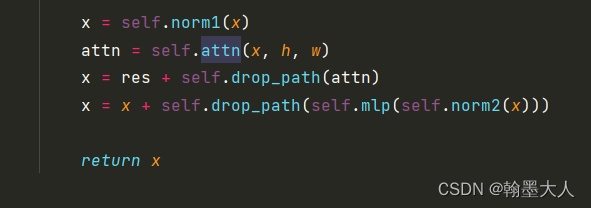
这样block计算完毕。
在第一个stage,深度为1,所以第一个stage计算完毕。生成新的x。
这样VisionTransformer计算完毕
生成的x作为下一个stage的输出。剩下的两个stage和第一个流程一样,就不一一分析了。
参数同样可以通过 i 的索引来获得:
for i in range(self.num_stages):
kwargs = {
'patch_size': spec['PATCH_SIZE'][i],
'patch_stride': spec['PATCH_STRIDE'][i],
'patch_padding': spec['PATCH_PADDING'][i],
'embed_dim': spec['DIM_EMBED'][i],
'depth': spec['DEPTH'][i],
'num_heads': spec['NUM_HEADS'][i],
'mlp_ratio': spec['MLP_RATIO'][i],
'qkv_bias': spec['QKV_BIAS'][i],
'drop_rate': spec['DROP_RATE'][i],
'attn_drop_rate': spec['ATTN_DROP_RATE'][i],
'drop_path_rate': spec['DROP_PATH_RATE'][i],
'with_cls_token': spec['CLS_TOKEN'][i],
'method': spec['QKV_PROJ_METHOD'][i],
'kernel_size': spec['KERNEL_QKV'][i],
'padding_q': spec['PADDING_Q'][i],
'padding_kv': spec['PADDING_KV'][i],
'stride_kv': spec['STRIDE_KV'][i],
'stride_q': spec['STRIDE_Q'][i],
}
然后输入到VisionTransformer中:
stage = VisionTransformer(
in_chans=in_chans,
init=init,
act_layer=act_layer,
norm_layer=norm_layer,
****kwargs**
)
经过forward_features后,在经过head。
def forward(self, x):
x = self.forward_features(x)
x = self.head(x)
return x
self.head = nn.Linear(dim_embed, num_classes) if num_classes > 0 else nn.Identity()
trunc_normal_(self.head.weight, std=0.02)
即输出最后的1000个类别。这样模型搭建完毕。
总结:
1:模型的创新点为重叠的卷积操作进行token编码,在代码中也就一行实现,另一个创新点就是卷积线性投射,相比于普通的线性投射多了一个逐通道卷积。
2:除此以外在模型结构上,有两个点首先是num_head为[1,3,6],每个stage是变化的,相比于普通的VIT一般都是固定为8。第二个就是每个stage的transformer的个数[1,4,16],而VIT或者SETR都是固定的,且不是分层的,这一点有点向卷积靠拢。
3:SegFormer也用到了重叠的卷积来进行patch merging。为了保留局部的连续性。
与本文不同的是卷积的配置。

4:卷积投射的操作和MPVIT的多尺度patch embedding很像。
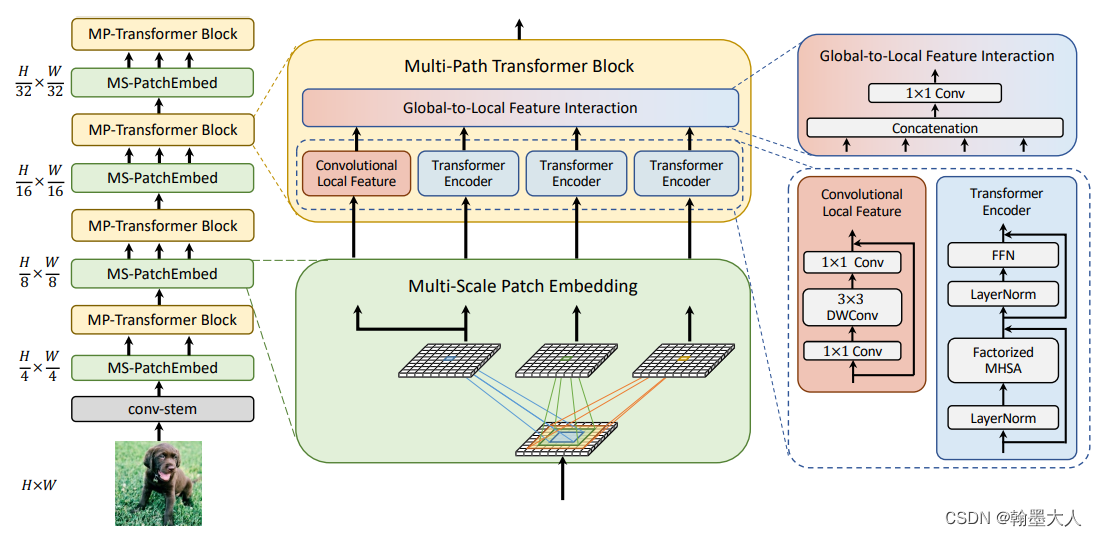
MPVIT的多尺度patch embedding核心代码:
class DWConv2d_BN(nn.Module):
"""
Depthwise Separable Conv
"""
def __init__(
self,
in_ch,
out_ch,
kernel_size=1,
stride=1,
norm_layer=nn.BatchNorm2d,
act_layer=nn.Hardswish,
bn_weight_init=1,
norm_cfg=dict(type="BN"),
):
super().__init__()
# dw
self.dwconv = nn.Conv2d(
in_ch,
out_ch,
kernel_size,
stride,
(kernel_size - 1) // 2,
**groups=out_ch**,
bias=False,
)
# pw-linear
self.pwconv = nn.Conv2d(out_ch, out_ch, 1, 1, 0, bias=False)
self.bn = build_norm_layer(norm_cfg, out_ch)[1]
self.act = act_layer() if act_layer is not None else nn.Identity()
for m in self.modules():
if isinstance(m, nn.Conv2d):
n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
m.weight.data.normal_(0, math.sqrt(2.0 / n))
if m.bias is not None:
m.bias.data.zero_()
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(bn_weight_init)
m.bias.data.zero_()
def forward(self, x):
x = self.**dwcon**v(x)
x = self.**pwconv**(x)
x = self.bn(x)
x = self.act(x)
return x
先进行逐通道卷积,再进行逐像素卷积。
因为我是语义分割方向,所以对于分类所用到的classtoken,classfier_head都需要删除掉,只显示最后的图片大小即可,同时为了将代码迁移到别的框架中,对他的配置文件读取全部改为直接的读取。代码如下:
from functools import partial
from itertools import repeat
# from torch._six import container_abcs
import logging
import os
from collections import OrderedDict
from torchsummary import summary
import numpy as np
import scipy
import torch
import torch.nn as nn
import torch.nn.functional as F
from einops import rearrange
from einops.layers.torch import Rearrange
from torch.nn.modules.utils import _pair
from timm.models.layers import DropPath, trunc_normal_
class LayerNorm(nn.LayerNorm):
def forward(self, x: torch.Tensor):
orig_type = x.dtype
ret = super().forward(x.type(torch.float32))
return ret.type(orig_type)
class QuickGELU(nn.Module):
def forward(self, x: torch.Tensor):
return x * torch.sigmoid(1.702 * x)
class Mlp(nn.Module):
def __init__(self,
in_features,
hidden_features=None,
out_features=None,
act_layer=nn.GELU,
drop=0.):
super().__init__()
out_features = out_features or in_features
hidden_features = hidden_features or in_features
self.fc1 = nn.Linear(in_features, hidden_features)
self.act = act_layer()
self.fc2 = nn.Linear(hidden_features, out_features)
self.drop = nn.Dropout(drop)
def forward(self, x):
x = self.fc1(x)
x = self.act(x)
x = self.drop(x)
x = self.fc2(x)
x = self.drop(x)
return x
class Attention(nn.Module):
def __init__(self,
dim_in,
dim_out,
num_heads,
qkv_bias=False,
attn_drop=0.,
proj_drop=0.,
method='dw_bn',
kernel_size=3,
stride_kv=1,
stride_q=1,
padding_kv=1,
padding_q=1,
with_cls_token=True,
**kwargs
):
super().__init__()
self.stride_kv = stride_kv
self.stride_q = stride_q
self.dim = dim_out
self.num_heads = num_heads
# head_dim = self.qkv_dim // num_heads
self.scale = dim_out ** -0.5
self.with_cls_token = with_cls_token
self.conv_proj_q = self._build_projection(
dim_in, dim_out, kernel_size, padding_q,
stride_q, 'linear' if method == 'avg' else method # s=1
)
self.conv_proj_k = self._build_projection(
dim_in, dim_out, kernel_size, padding_kv,#s=2
stride_kv, method
)
self.conv_proj_v = self._build_projection(
dim_in, dim_out, kernel_size, padding_kv,#s=2
stride_kv, method
)
self.proj_q = nn.Linear(dim_in, dim_out, bias=qkv_bias)
self.proj_k = nn.Linear(dim_in, dim_out, bias=qkv_bias)
self.proj_v = nn.Linear(dim_in, dim_out, bias=qkv_bias)
self.attn_drop = nn.Dropout(attn_drop)
self.proj = nn.Linear(dim_out, dim_out)
self.proj_drop = nn.Dropout(proj_drop)
def _build_projection(self,
dim_in,
dim_out,
kernel_size,
padding,
stride,
method):
if method == 'dw_bn':
proj = nn.Sequential(OrderedDict([
('conv', nn.Conv2d(
dim_in,
dim_in,
kernel_size=kernel_size,
padding=padding,
stride=stride,
bias=False,
groups=dim_in
)),
('bn', nn.BatchNorm2d(dim_in)),
('rearrage', Rearrange('b c h w -> b (h w) c')),
]))
elif method == 'avg':
proj = nn.Sequential(OrderedDict([
('avg', nn.AvgPool2d(
kernel_size=kernel_size,
padding=padding,
stride=stride,
ceil_mode=True
)),
('rearrage', Rearrange('b c h w -> b (h w) c')),
]))
elif method == 'linear':
proj = None
else:
raise ValueError('Unknown method ({})'.format(method))
return proj
def forward_conv(self, x, h, w):
if self.with_cls_token:
cls_token, x = torch.split(x, [1, h*w], 1)
x = rearrange(x, 'b (h w) c -> b c h w', h=h, w=w) #(1,64,40,40)
if self.conv_proj_q is not None:
q = self.conv_proj_q(x)#(1,3600,64)
else:
q = rearrange(x, 'b c h w -> b (h w) c')
if self.conv_proj_k is not None:
k = self.conv_proj_k(x)#(1,900,64)
else:
k = rearrange(x, 'b c h w -> b (h w) c')
if self.conv_proj_v is not None:
v = self.conv_proj_v(x)#(1,900,64)
else:
v = rearrange(x, 'b c h w -> b (h w) c')
if self.with_cls_token:
q = torch.cat((cls_token, q), dim=1)
k = torch.cat((cls_token, k), dim=1)
v = torch.cat((cls_token, v), dim=1)
return q, k, v
def forward(self, x, h, w):
if (
self.conv_proj_q is not None
or self.conv_proj_k is not None
or self.conv_proj_v is not None
):
q, k, v = self.forward_conv(x, h, w) #(1,3600,64),(1,900,64),(1,900,64)
q = rearrange(self.proj_q(q), 'b t (h d) -> b h t d', h=self.num_heads) #(1,1,3600,64)
k = rearrange(self.proj_k(k), 'b t (h d) -> b h t d', h=self.num_heads) #(1,1,900,64)
v = rearrange(self.proj_v(v), 'b t (h d) -> b h t d', h=self.num_heads) #(1,1,900,64)
attn_score = torch.einsum('bhlk,bhtk->bhlt', [q, k]) * self.scale #(1,1,3600,900)
attn = F.softmax(attn_score, dim=-1)
attn = self.attn_drop(attn)
x = torch.einsum('bhlt,bhtv->bhlv', [attn, v])#(1,1,3600,64)
x = rearrange(x, 'b h t d -> b t (h d)')#(1,3600,64)
x = self.proj(x)
x = self.proj_drop(x)
return x
class Block(nn.Module):
def __init__(self,
dim_in,
dim_out,
num_heads,
mlp_ratio=4.,
qkv_bias=False,
drop=0.,
attn_drop=0.,
drop_path=0.,
act_layer=nn.GELU,
norm_layer=nn.LayerNorm,
**kwargs):
super().__init__()
self.with_cls_token = kwargs['with_cls_token']
self.norm1 = norm_layer(dim_in)
self.attn = Attention(
dim_in, dim_out, num_heads, qkv_bias, attn_drop, drop,
**kwargs
)
self.drop_path = DropPath(drop_path) \
if drop_path > 0. else nn.Identity()
self.norm2 = norm_layer(dim_out)
dim_mlp_hidden = int(dim_out * mlp_ratio)
self.mlp = Mlp(
in_features=dim_out,
hidden_features=dim_mlp_hidden,
act_layer=act_layer,
drop=drop
)
def forward(self, x, h, w):
res = x #(1,3600,64)
x = self.norm1(x)
attn = self.attn(x, h, w) #(1,3600,64)
x = res + self.drop_path(attn) #(1,3600,64)
x = x + self.drop_path(self.mlp(self.norm2(x)))
return x
class ConvEmbed(nn.Module):
""" Image to Conv Embedding
"""
def __init__(self,
patch_size=7,
in_chans=3,
embed_dim=64,
stride=4,
padding=2,
norm_layer=None):
super().__init__()
patch_size = _pair(patch_size)
self.patch_size = patch_size
self.proj = nn.Conv2d(
in_chans,
embed_dim, #3,64
kernel_size=patch_size, #7
stride=stride, #4
padding=padding #2
)
self.norm = norm_layer(embed_dim) if norm_layer else None
def forward(self, x):
x = self.proj(x) #(1,64,60,60)
B, C, H, W = x.shape
x = rearrange(x, 'b c h w -> b (h w) c') #(1,64,3600)
if self.norm:
x = self.norm(x)
x = rearrange(x, 'b (h w) c -> b c h w', h=H, w=W) #(1,64,60,60)
return x
class VisionTransformer(nn.Module):
""" Vision Transformer with support for patch or hybrid CNN input stage
"""
def __init__(self,
patch_size=16,
patch_stride=16,
patch_padding=0,
in_chans=3,
embed_dim=768,
depth=12,
num_heads=12,
mlp_ratio=4.,
qkv_bias=False,
drop_rate=0.,
attn_drop_rate=0.,
drop_path_rate=0.,
act_layer=nn.GELU,
norm_layer=nn.LayerNorm,
init='trunc_norm',
**kwargs):
super().__init__()
self.num_features = self.embed_dim = embed_dim # num_features for consistency with other models
self.rearrage = None
self.patch_embed = ConvEmbed(
# img_size=img_size,
patch_size=patch_size,
in_chans=in_chans,
stride=patch_stride,
padding=patch_padding,
embed_dim=embed_dim,
norm_layer=norm_layer
)
with_cls_token = kwargs['with_cls_token']
if with_cls_token:
self.cls_token = nn.Parameter(
torch.zeros(1, 1, embed_dim)
)
else:
self.cls_token = None
self.pos_drop = nn.Dropout(p=drop_rate)
dpr = [x.item() for x in torch.linspace(0, drop_path_rate, depth)] # stochastic depth decay rule
blocks = []
for j in range(depth):
blocks.append(
Block(
dim_in=embed_dim, #64
dim_out=embed_dim,#64
num_heads=num_heads,#1
mlp_ratio=mlp_ratio,#
qkv_bias=qkv_bias,
drop=drop_rate,
attn_drop=attn_drop_rate,
drop_path=dpr[j],
act_layer=act_layer,
norm_layer=norm_layer,
**kwargs
)
)
self.blocks = nn.ModuleList(blocks)
def forward(self, x):
x = self.patch_embed(x) #(1,64,60,60)
B, C, H, W = x.size()
x = rearrange(x, 'b c h w -> b (h w) c') #(1,3600,64)
cls_tokens = None
if self.cls_token is not None:
# stole cls_tokens impl from Phil Wang, thanks
cls_tokens = self.cls_token.expand(B, -1, -1)
x = torch.cat((cls_tokens, x), dim=1)
x = self.pos_drop(x)
for i, blk in enumerate(self.blocks):
x = blk(x, H, W) #(1,3600,64)
if self.cls_token is not None:
cls_tokens, x = torch.split(x, [1, H*W], 1)
x = rearrange(x, 'b (h w) c -> b c h w', h=H, w=W)#(1,64,60,60)
return x, cls_tokens
class ConvolutionalVisionTransformer(nn.Module):
def __init__(self,
in_chans=(512,256,128),
act_layer=nn.GELU,
norm_layer=nn.LayerNorm,
init='trunc_norm',
patch_size=(7,3,3),
patch_stride=(4,2,2),
patch_padding=(2,1,1),
embed_dim=(64,192,384),
depth=(1,4,16),
num_heads=(1,3,6),
mlp_ratio=(4,4,4),
qkv_bias=(True,True,True),
drop_rate=(0,0,0),
attn_drop_rate=(0,0,0,),
drop_path_rate=(0,0,0.1),
with_cls_token=(False, False, True),
method=('dw_bn', 'dw_bn', 'dw_bn'),
kernel_size=(3,3,3),
padding_q=(1,1,1),
padding_kv=(1,1,1),
stride_kv=(2,2,2),
stride_q=(1,1,1),
spec=None):
super().__init__()
self.num_stages = 3
for i in range(self.num_stages):
kwargs = {
'in_chans' : in_chans[i],
'patch_size': patch_size[i],
'patch_stride': patch_stride[i],
'patch_padding': patch_padding[i],
'embed_dim': embed_dim[i],
'depth': depth[i],
'num_heads': num_heads[i],
'mlp_ratio': mlp_ratio[i],
'qkv_bias': qkv_bias[i],
'drop_rate': drop_rate[i],
'attn_drop_rate': attn_drop_rate[i],
'drop_path_rate': drop_path_rate[i],
'with_cls_token': with_cls_token[i],
'method': method[i],
'kernel_size': kernel_size[i],
'padding_q': padding_q[i],
'padding_kv': padding_kv[i],
'stride_kv': stride_kv[i],
'stride_q': stride_q[i],
}
stage = VisionTransformer(
init=init,
act_layer=act_layer,
norm_layer=norm_layer,
**kwargs
)
setattr(self, f'stage{i}', stage)#用于设置属性值
def forward(self, x,i =0):
# for i in range(self.num_stages):
# i = [0,1,2,3]
x_1 = getattr(self, f'stage{i}')(x) #(1,64,60,60) #getattr返回一个对象 属性对应的值
return x_1
def main():
# --------------------------------实例化ConvolutionalVisionTransformer-------------------------
model = ConvolutionalVisionTransformer() # (传入参数)
model.eval()
rgb_image = torch.randn(1, 512, 240, 240)
summary(model, input_size=[(512, 240, 240)], device='cpu')
with torch.no_grad():
output = model(rgb_image)
print(output.shape)
if __name__ == '__main__':
main()
其中num_stage控制stage的个数,depth控制每个stage的块数。
这样我们每经过一个stage,我们就去ConvolutionalVisionTransformer对应的参数中取对应的值。这样就形成了新的kwargs,然后在输入到VisionTransformer中,就替换掉原始的默认值。
同时我们可以在forward函数中,指定i的值,这样在实例化的时候,指定i的值,ConvolutionalVisionTransformer就具有很大的灵活性。因为原文是穿行的transformer,这样也可以使用并行的transformer,且可以在任何的位置使用。
因此就可以把代码迁移到其他框架中。















 5913
5913











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









