







最近做了一个获取温度传感器数据并显示到数码管上的需求,选型的传感器都是基于RS485-MODBUS-RTU协议进行通讯,串口参数均为一位起始位、8位数据位、一位停止位、无校验位,波特率统一设置为9600。
数码管及温度传感器链接如下,有需要了解详细协议文档的可去查看
https://item.taobao.com/item.htm?spm=a230r.1.14.35.6ba8b1dcD1fV02&id=635267329704&ns=1&abbucket=4#detail
https://item.taobao.com/item.htm?spm=a230r.1.14.152.75a533eelohANg&id=676374539800&ns=1&abbucket=4&mt=
1、485协议简介
RS485是一种典型的串口通讯协议,是基于串口通讯本身对电路信号进行调制的一种软件协议,RS-485总线标准规定了总线接口的电气特性标准即对于2个逻辑状态的定义:正电平在+2V~+6V之间,表示一个逻辑状态;负电平在-2V~-6V之间,则表示另一个逻辑状态;电信号采用差分传输的方式,可以有效的屏蔽线路外的电磁干扰实现超远距离通讯,其协议本身与串口协议相同,在开发方式上并无太大区别。
2、传感器连接和设备通讯协议介绍
传感器及数码管通过485口连接到开发板

温度传感器读取温度数据协议格式及参数

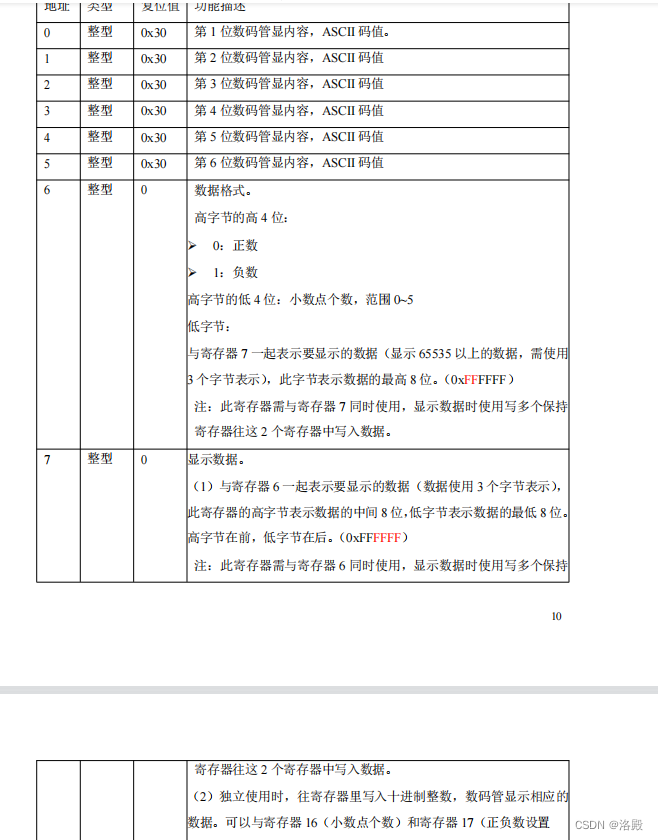
数码管写入数据说明
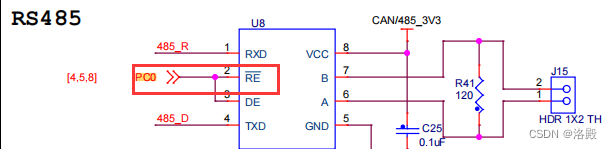
3、板子485串口及引脚复用介绍
本次的F407板子485转换芯片是接在串口2上的,对应发送和接收引脚为PA2和PA3,收发控制引脚为PC0

4、配置串口所需GPIO并复用相关引脚
本例需要GPIOA和GPIOC分别进行配置以满足其功能需求
/*
* 函数名:_485_GPIO_Config
* 描述 :配置485GPIO引脚
* 输入 :无
* 输出 : 无
* 调用 :内部调用
*/
void _485_GPIO_Config (void)
{
//初始化GPIOA和C,PA2和AP3用于串口收发、PC0用于控制485发送使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA|RCC_AHB1Periph_GPIOC,ENABLE);
//将引脚复用到串口2, PS:实际引脚要根据485转换芯片接的引脚为准
GPIO_PinAFConfig(GPIOA,GPIO_PinSource2,GPIO_AF_USART2);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource3,GPIO_AF_USART2);
GPIO_InitTypeDef GPIO_InitStructure;
//设置为复用模式
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
//设置为推挽模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
//选择PA2和PA3作为收发引脚
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2|GPIO_Pin_3;
//设置引脚浮空
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
//配置引脚速度
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
//初始化GPIOA
GPIO_Init(GPIOA,&GPIO_InitStructure);
//初始化GPIOC引脚0 设置为输出模式
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_Init(GPIOC,&GPIO_InitStructure);
}
5、配置NVIC中断控制
PS:一个项目中只能配置一个NVIC分组方式
/*
* 函数名:_485_USART_NVIC_Config
* 描述 :配置串口中断
* 输入 :无
* 输出 : 无
* 调用 :内部调用
*/
void _485_USART_NVIC_Config (void)
{
//配置NVIC分组
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
NVIC_InitTypeDef NVIC_InitStructure;
//设置中断通道
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd =ENABLE;
//配置响应优先级分组
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
//配置抢占优先级分组
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
//中断使能
NVIC_Init(&NVIC_InitStructure);
}
6、配置串口参数并使能
串口参数配置根据实际设备的需求来设置,可选择有无奇偶校验、数据帧长度、停止位长度、是否需要流控等
/*
* 函数名:_485_USART_Config
* 描述 :用于配置串口参数
* 输入 :无
* 输出 : 无
* 调用 :内部调用
*/
void _485_USART_Config (void)
{
//串口时钟使能
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);
USART_InitTypeDef USART_InitStructure;
//配置波特率
USART_InitStructure.USART_BaudRate = 9600;
//设置无流控
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
//设置发送和接收都使能
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
//设置无校验位
USART_InitStructure.USART_Parity = USART_Parity_No;
//设置一个停止位
USART_InitStructure.USART_StopBits = USART_StopBits_1;
//设置数据位为8位
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_Init(USART2,&USART_InitStructure);
//串口使能
USART_Cmd(USART2,ENABLE);
//配置串口中断
USART_ITConfig(USART2,USART_IT_RXNE,ENABLE);
//初始默认串口为接收模式
GPIO_ResetBits(GPIOC,GPIO_Pin_0);
}
8、封装外部调用函数来统一启动配置
/*
* 函数名:_485_Init
* 描述 :初始化485所有配置
* 输入 :
* 输出 : 无
* 调用 :外部调用
*/
void _485_Init (void)
{
_485_GPIO_Config();
//先开启中断配置再开启串口配置,否则中断可能不生效
_485_USART_NVIC_Config();
_485_USART_Config();
}
9、封装CRC校验函数及清理缓存区函数
static const unsigned char auchCRCHi[]=
{
0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41,0x01,0xC0, 0x80,0x41,0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41,0x00,0xC1,0x81,0x40,0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41,0x01,0xC0,0x80,0x41,0x00,0xC1,0x81,0x40, 0x00,0xC1,0x81,0x40,0x01,0xC0,0x80,0x41,0x00,0xC1, 0x81,0x40,0x01,0xC0,0x80,0x41,0x01,0xC0,0x80,0x41,0x00,0xC1,0x81,0x40,0x01,0xC0, 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5235
5235

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









