






典型的动态优化问题(也称为最优控制问题)求解 ,常用于轨迹优化。
1. 问题描述
目标函数:
min
Cost
=
∑
k
=
2
11
(
x
k
−
1
)
2
+
∑
k
=
1
10
u
k
2
\min \text{Cost} = \sum_{k=2}^{11}(x_k-1)^2+\sum_{k=1}^{10}u_k^2
minCost=∑k=211(xk−1)2+∑k=110uk2
约束条件:
- 状态方程: x [ n + 1 ] = 0.8 ∗ x [ n ] + u [ n ] x[n+1]=0.8*x[n]+u[n] x[n+1]=0.8∗x[n]+u[n]
- 控制输入: u [ n ] ∈ [ − 2 , 2 ] u[n]\in[-2,2] u[n]∈[−2,2]
- 初始状态: x [ 1 ] = 0 x[1]=0 x[1]=0
2. scipy求解
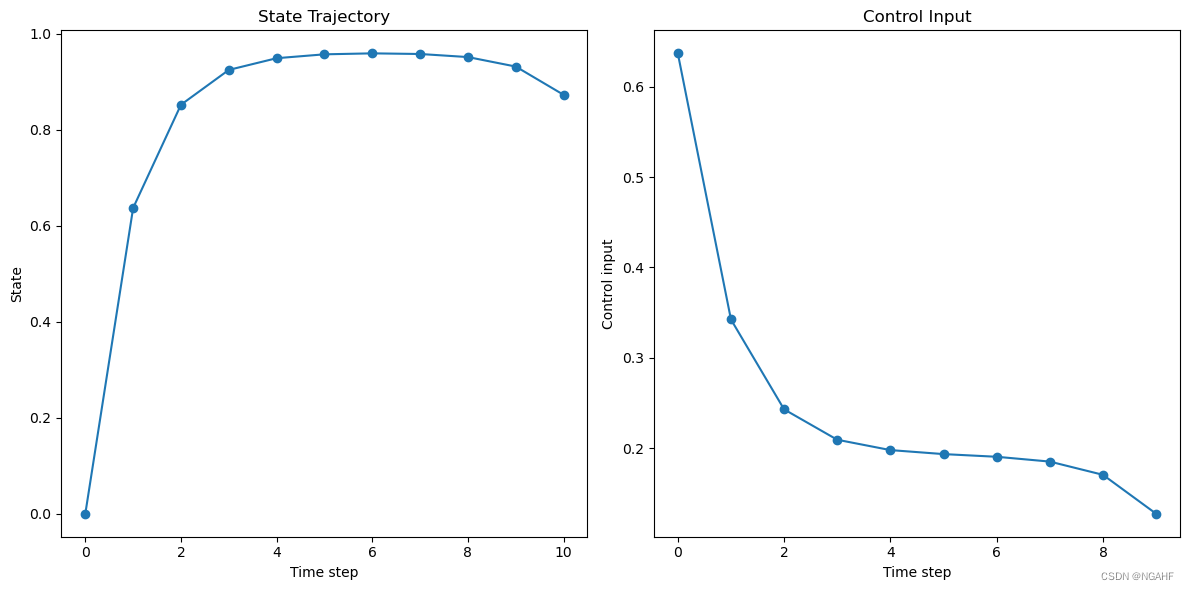
首先利用scipy求解,思路类似于连续系统情况下的打靶法 (shooting method),即优化变量是离散(时间上)的控制输入,目标函数和约束条件都表示为控制输入的函数。
import numpy as np
from scipy.optimize import minimize
import matplotlib.pyplot as plt
# 定义时间区间和初始条件
N = 10
x0 = 0
x = np.zeros(N+1)
x[0] = x0
# 定义目标函数
def objective(u):
for i in range(N):
x[i+1] = 0.8*x[i] + u[i]
return np.sum((x[1:]-1)**2) + np.sum(u**2)
# 定义约束条件
cons = ({'type': 'ineq', 'fun': lambda u: 2 - u},
{'type': 'ineq', 'fun': lambda u: u + 2})
# 初始猜测
u0 = np.zeros(N)
# 求解
sol = minimize(objective, u0, method='SLSQP', constraints=cons)
# 打印结果
print(f"Optimal control sequence: {sol.x}")
print(f"Minimum loss value: {sol.fun}")
if sol.success:
print("Optimization was successful.")
else:
print(f"Optimization failed: {sol.message}")
# 绘图
# 使用之前求解得到的控制输入
u = sol.x
# 计算状态轨迹
x = np.zeros(N+1)
x[0] = x0
for i in range(N):
x[i+1] = 0.8*x[i] + u[i]
# 绘制状态轨迹
plt.figure(figsize=(12, 6))
plt.subplot(1, 2, 1)
plt.plot(range(N+1), x, 'o-')
plt.title('State Trajectory')
plt.xlabel('Time step')
plt.ylabel('State')
# 绘制控制输入
plt.subplot(1, 2, 2)
plt.plot(range(N), u, 'o-')
plt.title('Control Input')
plt.xlabel('Time step')
plt.ylabel('Control input')
plt.tight_layout()
plt.show()
输出:
Optimal control sequence: [0.63698059 0.34243414 0.24294484 0.20931517 0.19786525 0.1934362 0.19046757 0.18514381 0.1705031 0.12745731]
Minimum loss value: 1.0088266500834469
Optimization was successful.
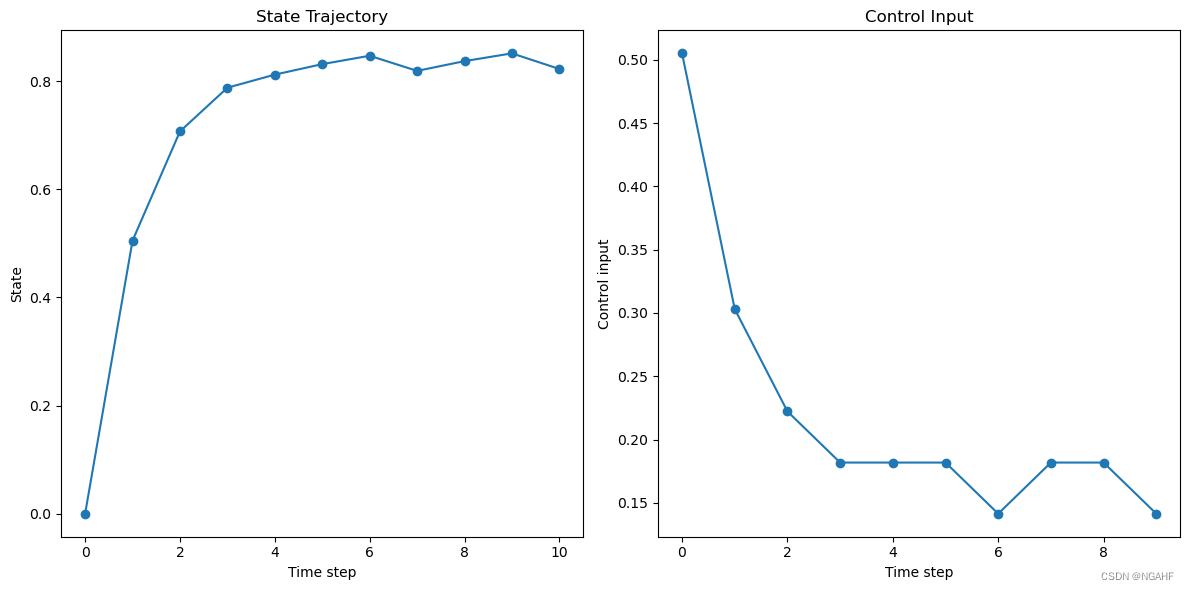
3. 贪心求解
import numpy as np
import matplotlib.pyplot as plt
# 定义参数
N = 10 # 时间步数
x = np.zeros(N+1) # 状态变量
u = np.zeros(N) # 控制输入
u_min, u_max = -2, 2 # 控制输入的范围
x[0] = 0 # 初始状态
cost = 0
# 定义一步损失
def one_step_cost(x, u):
return np.sum((x - 1)**2) + np.sum(u**2)
# 定义状态更新函数
def update_state(x, u):
return 0.8 * x + u
# 贪心算法求解
for k in range(N):
best_obj = np.inf
best_u = None
for u_k in np.linspace(u_min, u_max, 100): # 在控制输入的范围内搜索
x_next = update_state(x[k], u_k)
obj = one_step_cost(x_next, u_k)
if obj < best_obj:
best_obj = obj
best_u = u_k
u[k] = best_u
x[k+1] = update_state(x[k], u[k])
cost += best_obj
print("最优控制输入:", u)
print("最优状态:", x)
print("最终代价:", cost)
# 绘图
# 绘制状态轨迹
plt.figure(figsize=(12, 6))
plt.subplot(1, 2, 1)
plt.plot(range(N+1), x, 'o-')
plt.title('State Trajectory')
plt.xlabel('Time step')
plt.ylabel('State')
# 绘制控制输入
plt.subplot(1, 2, 2)
plt.plot(range(N), u, 'o-')
plt.title('Control Input')
plt.xlabel('Time step')
plt.ylabel('Control input')
plt.tight_layout()
plt.show()
输出
最优控制输入: [0.50505051 0.3030303 0.22222222 0.18181818 0.18181818 0.18181818 0.14141414 0.18181818 0.18181818 0.14141414]
最优状态: [0. 0.50505051 0.70707071 0.78787879 0.81212121 0.83151515 0.8470303 0.81903838 0.83704889 0.85145729 0.82257998]
最终代价: 1.1772775333335328
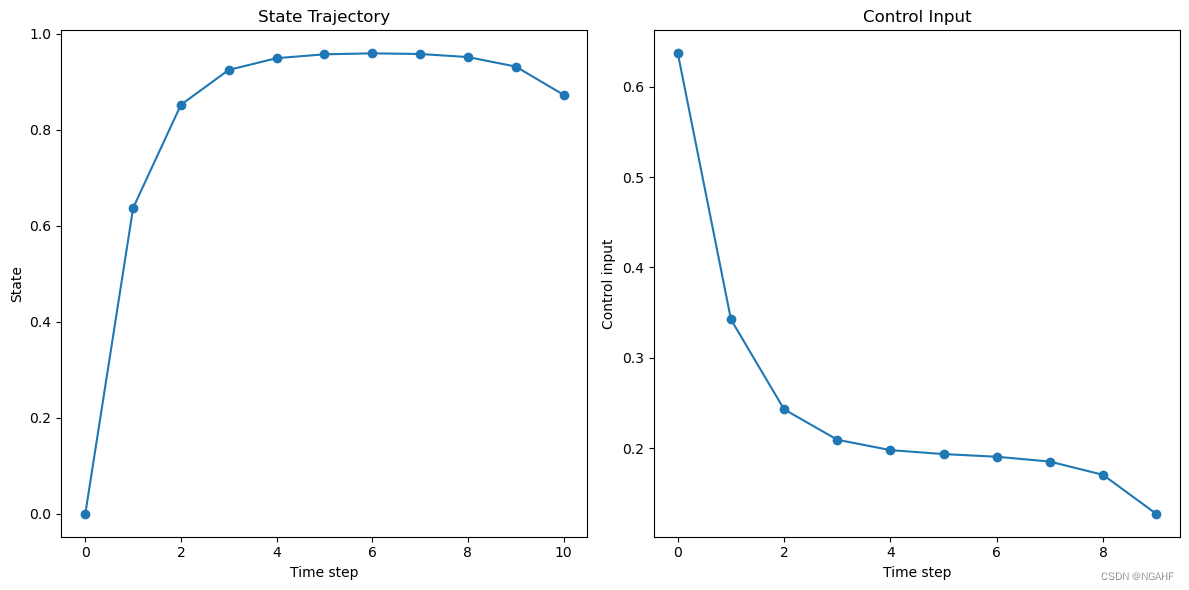
4. cvxpy求解
最后利用cvxpy求解,求解思路类似于连续情况下的配点法 (collocation),即优化变量是离散(时间上)的控制输入和状态变量,目标函数和约束条件均表示为离散控制输入和状态变量的函数。
import cvxpy as cp
import matplotlib.pyplot as plt
# 定义时间步长和时长
T = 10 # 总时间步长
dt = 1.0 # 单位时间步长
# 定义状态变量和控制变量
x = cp.Variable((T+1, 1)) # 状态变量:位置
u = cp.Variable(T) # 控制变量:加速度
# 动态模型约束
dynamics_constraints = []
cost = 0
for t in range(T):
# 基本的运动学方程:x[t+1] = 0.8 * x[t] + u[t]
dyn_constr_equ = x[t+1, 0] == 0.8 * x[t, 0] + u[t]
dynamics_constraints += [dyn_constr_equ, cp.norm(u[t],'inf')<=2]
cost += cp.sum_squares(x[t + 1]-1) + cp.sum_squares(u[t])
# 初始条件和终止条件
initial_conditions = [x[0, 0] == 0] # 初位置
# 成本函数(例如,最小化控制能量总和)
objective = cp.Minimize(cost)
# 求解最优控制问题
problem = cp.Problem(objective, dynamics_constraints + initial_conditions)
problem.solve()
# 打印结果
print("最优状态变量:")
print(x.value)
print("最优控制变量:")
print(u.value)
print('最终代价:', problem.value)
# 绘图
# 绘制状态轨迹
plt.figure(figsize=(12, 6))
plt.subplot(1, 2, 1)
plt.plot(range(T+1), x.value, 'o-')
plt.title('State Trajectory')
plt.xlabel('Time step')
plt.ylabel('State')
# 绘制控制输入
plt.subplot(1, 2, 2)
plt.plot(range(T), u.value, 'o-')
plt.title('Control Input')
plt.xlabel('Time step')
plt.ylabel('Control input')
plt.tight_layout()
plt.show()
输出
最优状态变量: [[6.05901594e-10] [6.36957512e-01] [8.51959787e-01] [9.24509784e-01] [9.48922497e-01] [9.56934454e-01] [9.58961201e-01] [9.57637505e-01] [9.51242564e-01] [9.31462954e-01] [8.72585183e-01]]
最优控制变量: [0.63695751 0.34239378 0.24294195 0.20931467 0.19779646 0.19341364 0.19046854 0.18513256 0.1704689 0.12741482]
最终代价: 1.0088265717021232
5. 小结
| method | cost |
|---|---|
| scipy | 1.0088266500834469 |
| 贪心 | 1.1772775333335328 |
| cvxpy | 1.0088265717021232 |















 1771
1771











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









