







 文章探讨了特征点检测中的OrientedFAST方法,它是FAST角点检测的增强版,增加了方向信息。BRIEF被用作描述子,通过SteerBRIEF实现旋转不变性,以优化特征匹配过程。
文章探讨了特征点检测中的OrientedFAST方法,它是FAST角点检测的增强版,增加了方向信息。BRIEF被用作描述子,通过SteerBRIEF实现旋转不变性,以优化特征匹配过程。
本小结主要描述特征点、特征点法、特征匹配
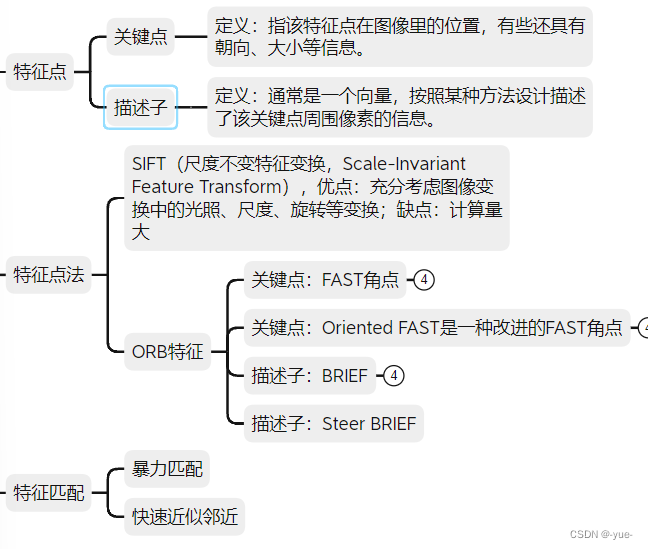
其中特征点法中重点描述ORB特征中Oriented FAST角点
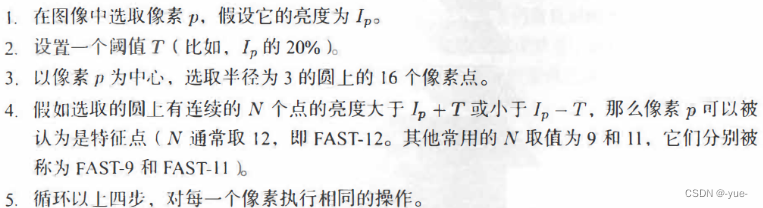
传统FAST角点:如果一个像素与邻域的像素差别较大(过亮或过暗), 那么它更可能是角点。

其流程:
预检测:直接检测邻域圆上的第1,5,9,13个像素的亮度。只有当这4个像素中有3个同时大于Ip +T或小于Ip- T时, 当前像素才有可能是一个角点, 否则应该直接排除
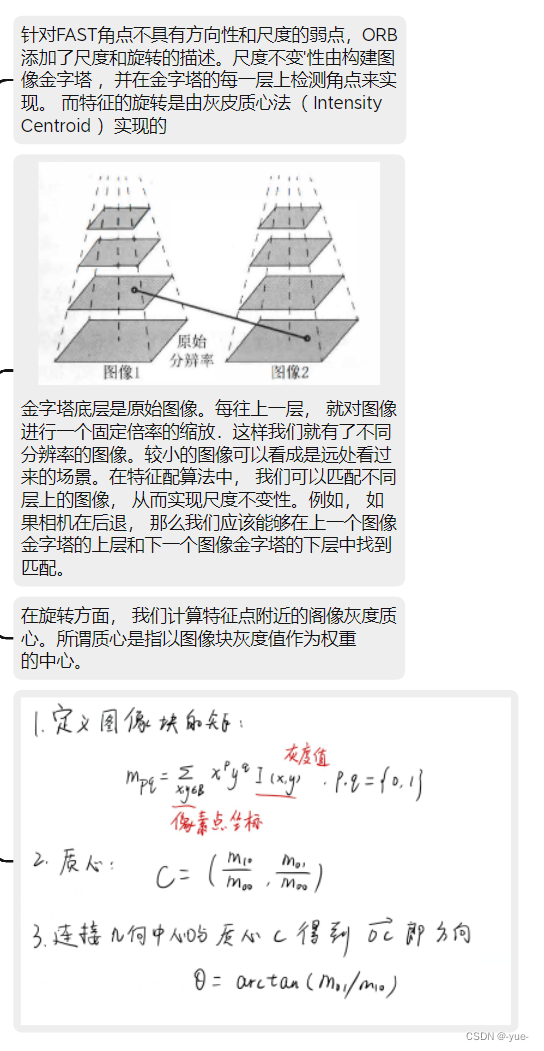
关键点:Oriented FAST是一种改进的FAST角点
描述子:BRIEF
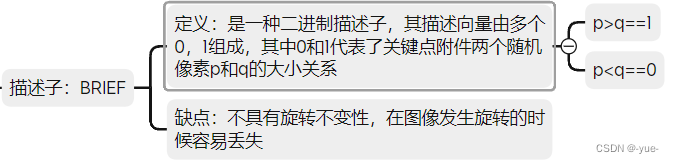
为了使描述子具有旋转不变性,采用Steer BRIEF。
特征匹配















 1013
1013











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









