






 本文详细介绍了在三维空间中进行姿态表示和转换的算法,包括全局变量定义、三维向量的反对称矩阵、姿态角到姿态阵、姿态阵到姿态角、姿态角到四元数、四元数到姿态角、姿态阵到四元数、四元数到姿态阵、旋转矢量到变换矩阵、旋转矢量到四元数、四元数到旋转矢量、四元数共轭、四元数归一化、四元数相乘以及四元数与向量的乘法等。这些算法在航空航天、机器人和导航等领域有广泛应用。
本文详细介绍了在三维空间中进行姿态表示和转换的算法,包括全局变量定义、三维向量的反对称矩阵、姿态角到姿态阵、姿态阵到姿态角、姿态角到四元数、四元数到姿态角、姿态阵到四元数、四元数到姿态阵、旋转矢量到变换矩阵、旋转矢量到四元数、四元数到旋转矢量、四元数共轭、四元数归一化、四元数相乘以及四元数与向量的乘法等。这些算法在航空航天、机器人和导航等领域有广泛应用。
1.全局变量
global GM Re ff wie ge gp g0 ug arcdeg arcmin arcsec hur dph dpsh ugpsHz lsc % Global VARables
GM = 3.986004415e14; Re = 6.378136998405e6; wie = 7.2921151467e-5; % WGS-84 model
ff = 1/298.257223563; ee = sqrt(2*ff-ff^2); e2 = ee^2; Rp = (1-ff)*Re;
ge = 9.780325333434361;赤道重力
gp = 9.832184935381024;极点重力
g0 = ge;
ug = g0*1e-6; % gravity, ug
arcdeg = pi/180;
arcmin = arcdeg/60;
arcsec = arcmin/60; % angle unit
hur = 3600; dph = arcdeg/hur; dpsh = arcdeg/sqrt(hur); % hour, deg/hour, deg/sqrt(hour)
ugpsHz = ug/sqrt(1); % ug/sqrt(Hz)
lsc = [' -k';' -b';' -r';'-.m';'--g';' :c']; % line shape & color
2.三维向量的反对称矩阵
function m = askew(v)
m = [ 0, -v(3), v(2);
v(3), 0, -v(1);
-v(2), v(1), 0 ];
3.姿态角转换为姿态阵
输入姿态角向量att含三个分量,依次为俯仰角、横滚角和方位角,特别注意:程序中定义方位角北偏西为正(而非北偏东为正),参考公式为:

function Cnb = a2mat(att)
s = sin(att); c = cos(att);
si = s(1); sj = s(2); sk = s(3); ci = c(1); cj = c(2); ck = c(3);
Cnb = [ cj*ck-si*sj*sk, -ci*sk, sj*ck+si*cj*sk;
cj*sk+si*sj*ck, ci*ck, sj*sk-si*cj*ck;
-ci*sj, si, ci*cj ];
4.姿态阵转换为姿态角
function att = m2att(Cnb)
if abs(Cnb(3,2))<=0.999999
att = [ asin(Cnb(3,2)); -atan2(Cnb(3,1),Cnb(3,3)); -atan2(Cnb(1,2),Cnb(2,2)) ];
else
att = [ asin(Cnb(3,2)); atan2(Cnb(1,3),Cnb(1,1)); 0 ];
end
5.姿态角转换为四元数
参考公式: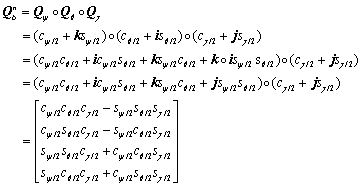
function qnb = a2qua(att)
s = sin(att/2); c = cos(att/2);
si = s(1); sj = s(2); sk = s(3); ci = c(1); cj = c(2); ck = c(3);
qnb = [ ci*cj*ck - si*sj*sk;
si*cj*ck - ci*sj*sk;
ci*sj*ck + si*cj*sk;
ci*cj*sk + si*sj*ck ];
% qnb = m2qua(a2mat(att));
6.四元数转换为姿态角
function att = q2att(qnb)
att = m2att(q2mat(qnb));
7.姿态阵转换为四元数
function qnb = m2qua(Cnb)
C11 = Cnb(1,1); C12 = Cnb(1,2); C13 = Cnb(1,3);
C21 = Cnb(2,1); C22 = Cnb(2,2); C23 = Cnb(2,3);
C31 = Cnb(3,1); C32 = Cnb(3,2); C33 = Cnb(3,3);
if C11>=C22+C33
q1 = 0.5*sqrt(1+C11-C22-C33);
q0 = (C32-C23)/(4*q1); q2 = (C12+C21)/(4*q1); q3 = (C13+C31)/(4*q1);
elseif C22>=C11+C33
q2 = 0.5*sqrt(1-C11+C22-C33);
q0 = (C13-C31)/(4*q2); q1 = (C12+C21)/(4*q2); q3 = (C23+C32)/(4*q2);
elseif C33>=C11+C22
q3 = 0.5*sqrt(1-C11-C22+C33);
q0 = (C21-C12)/(4*q3); q1 = (C13+C31)/(4*q3); q2 = (C23+C32)/(4*q3);
else
q0 = 0.5*sqrt(1+C11+C22+C33);
q1 = (C32-C23)/(4*q0); q2 = (C13-C31)/(4*q0); q3 = (C21-C12)/(4*q0);
end
qnb = [q0; q1; q2; q3];
8.四元数转换为姿态阵
参考公式:
function Cnb = q2mat(qnb)
q11 = qnb(1)*qnb(1); q12 = qnb(1)*qnb(2); q13 = qnb(1)*qnb(3); q14 = qnb(1)*qnb(4);
q22 = qnb(2)*qnb(2); q23 = qnb(2)*qnb(3); q24 = qnb(2)*qnb(4);
q33 = qnb(3)*qnb(3); q34 = qnb(3)*qnb(4);
q44 = qnb(4)*qnb(4);
Cnb = [ q11+q22-q33-q44, 2*(q23-q14), 2*(q24+q13);
2*(q23+q14), q11-q22+q33-q44, 2*(q34-q12);
2*(q24-q13), 2*(q34+q12), q11-q22-q33+q44 ];
9.旋转矢量转换为变换矩阵
参考公式:
function m = rv2m(rv)
nm2 = rv'*rv; % 旋转矢量的模方
if nm2<1.e-8 % 如果模方很小,则可用泰勒展开前几项求三角函数
a = 1-nm2*(1/6-nm2/120); b = 0.5-nm2*(1/24-nm2/720);
else
nm = sqrt(nm2);
a = sin(nm)/nm; b = (1-cos(nm))/nm2;
end
VX = askew(rv);
m = eye(3) + a*VX + b*VX^2;
10.旋转矢量转换为变换四元数
function q = rv2q(rv)
nm2 = rv'*rv; % 旋转矢量的模方
if nm2<1.0e-8 % 如果模方很小,则可用泰勒展开前几项求三角函数
q0 = 1-nm2*(1/8-nm2/384); s = 1/2-nm2*(1/48-nm2/3840);
else
nm = sqrt(nm2);
q0 = cos(nm/2); s = sin(nm/2)/nm;
end
q = [q0; s*rv];
11.变换四元数转换为旋转矢量
首先,将四元数转化为标量非负的四元数;其次,根据公式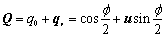
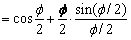
,先由四元数的标量关系
求旋转矢量模值的一半,再由矢量关系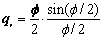
求等效旋转矢量
function rv = q2rv(q)
if q(1)<0, q = -q; end
nmhalf = acos(q(1)); % 等效旋转矢量模值的一半
if nmhalf>1e-20, b = 2*nmhalf/sin(nmhalf);
else b = 2; end
rv = b*q(2:4);
12.四元数共轭

function qout = qconj(qin)
qout = [qin(1); -qin(2:4)];
13.四元数归一化
function qnb = qnormlz(qnb)
nm = qnb'*qnb;
if nm<1e-6, qnb = [1; 0; 0; 0]; % 表示姿态的四元数,其模值应约为1
else qnb = qnb/sqrt(nm); end
14.四元数相乘
function q = qmul(q1, q2)
q = [ q1(1) * q2(1) - q1(2) * q2(2) - q1(3) * q2(3) - q1(4) * q2(4);
q1(1) * q2(2) + q1(2) * q2(1) + q1(3) * q2(4) - q1(4) * q2(3);
q1(1) * q2(3) + q1(3) * q2(1) + q1(4) * q2(2) - q1(2) * q2(4);
q1(1) * q2(4) + q1(4) * q2(1) + q1(2) * q2(3) - q1(3) * q2(2) ]
15.四元数乘向量(三维向量坐标变换)
参考公式:

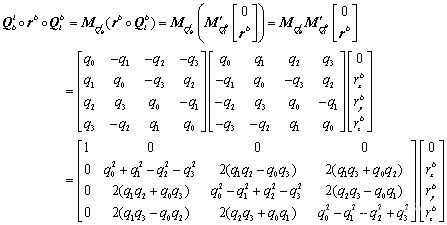
function vo = qmulv(q, vi)
qi = [0;vi];
qo = qmul(qmul(q,qi),qconj(q));
vo = qo(2:4,1);
% vo = q2mat(q)*vi;
16.四元数加失准角误差
function qpb = qaddphi(qnb, phi)
qpb = qmul(rv2q(-phi),qnb);
17.四元数减失准角误差
function qnb = qdelphi(qpb, phi)
qnb = qmul(rv2q(phi), qpb);
18.由计算四元数和真实四元数计算失准角误差
function phi = qq2phi(qpb, qnb)
qerr = qmul(qnb, qconj(qpb));
phi = q2rv(qerr);
19.圆锥/划船误差补偿
参考公式:
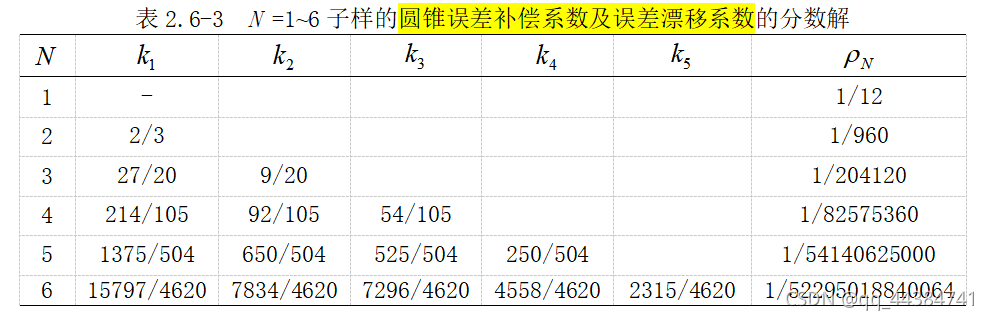

function [phim, dvbm] = cnscl(wm, vm)
cs = [ [2, 0, 0, 0, 0 ]/3
[9, 27, 0, 0, 0 ]/20
[54, 92, 214, 0, 0 ]/105
[250, 525, 650, 1375, 0 ]/504
[2315, 4558, 7296, 7834, 15797]/4620 ]; % 2-6子样补偿系数
wmm = sum(wm,1); vmm = sum(vm,1);
%sum(A,1) 对 A 的列中的连续元素进行求和并返回一个包含每列之和的行向量。
dphim = zeros(1,3); scullm = zeros(1,3);
n = size(wm, 1); % 子样数,获取wm的行数,并赋值给n,为字样数。
if n>1
csw = cs(n-1,1:n-1)*wm(1:n-1,:); csv = cs(n-1,1:n-1)*vm(1:n-1,:);
dphim = cross(csw,wm(n,:)); % 圆锥补偿量
scullm = cross(csw,vm(n,:))+cross(csv,wm(n,:)); % 划船补偿量
end
phim = (wmm+dphim)'; %圆锥补偿后的旋转矢量
dvbm = (vmm+0.5*cross(wmm,vmm)+scullm)'; %旋转和划船补偿后的速度增量


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









