







 本文介绍了使用MATLAB实现的SAR成像过程,特别是应用了后向投影算法(BP算法),并添加了详细注释和可视化图表。作者还优化了代码,利用GPU加速,测试显示速度提高了约50倍。内容涵盖了关键参数设置、信号处理和成像步骤。
本文介绍了使用MATLAB实现的SAR成像过程,特别是应用了后向投影算法(BP算法),并添加了详细注释和可视化图表。作者还优化了代码,利用GPU加速,测试显示速度提高了约50倍。内容涵盖了关键参数设置、信号处理和成像步骤。
此文为SAR BP成像matlab实现,主要参考matlab实现-合成孔径雷达(SAR)-后向投影算法(BP算法)公式分析-完整代码-详解,并在其基础上增加更多注释和可视化图,并改写了GPU加速代码,经测试提速约为50倍。
此文旨在记录学习过程,有错误的地方欢迎指出,谢谢。
clear;
close all;
clc;
% 参数
use_gpu = false;% 是否使用GPU加速
Fc = 25.5e9;% 中心频率
Band = 4e9;% 带宽
TimeUp = 640e-6;% 升频率时间
TimeTotal = 1000e-6;% 一个chirp周期总时间
Fs = 25e5;% 采样频率
% 一个chirp周期升频率采样点数
SamplePerChripUp = double(int32(TimeUp*Fs));% 1600
C = physconst('lightspeed');% 光速
%
Nr = SamplePerChripUp;
Tfast = (0:SamplePerChripUp-1)/SamplePerChripUp*TimeUp;
% size(Tfast) = 1 * 1600
% 0 到 0.6396e-3的1600个数,表示chirp升频过程中的时间下标
plot(Tfast)
% Kr表示调频率,即频率变化速度
Kr = Band/TimeUp;% 6.2500e+12
dr = C/2/Band;% 距离分辨率
lambda = C/Fc;% 信号波长
theta = 120;% 雷达有效探照角度
RadarVelocity = 5;% 雷达运动速度
Timer = 4;% 整个过程持续时间
Na = Timer/TimeTotal;% 方位向位置总点数, 表示有多少个chirp周期
% Na = 4000
% 雷达位置,表示雷达的三维坐标,xyz,其中x为变化的,yz均为0
RadarPos = [(-Timer/2:TimeTotal:Timer/2-1/Fs)*RadarVelocity; zeros(1,Na); zeros(1,Na)];
% size(RadarPos) = 3 * 4000
% 目标点xz=0,y=10
TargetPos = [0,10,0];% 仿真点位置
% 雷达与仿真点距离,表示雷达和目标点的三维空间距离
Range = sqrt( ...
(RadarPos(1,:)-TargetPos(1)).^2 ...
+(RadarPos(2,:)-TargetPos(2)).^2 ...
+(RadarPos(3,:)-TargetPos(3)).^2);
% acosd表示反余弦,./表示数组除法
% TargetPos(2) = 10
% 判断目标是否在探照面内,判断是否在120°范围内
isFull = acosd(TargetPos(2)./Range)<theta/2;
N_up = 10; % 升采样倍数
% tau表示波的双程延时,2倍距离/光速
tau = 2*Range/C;
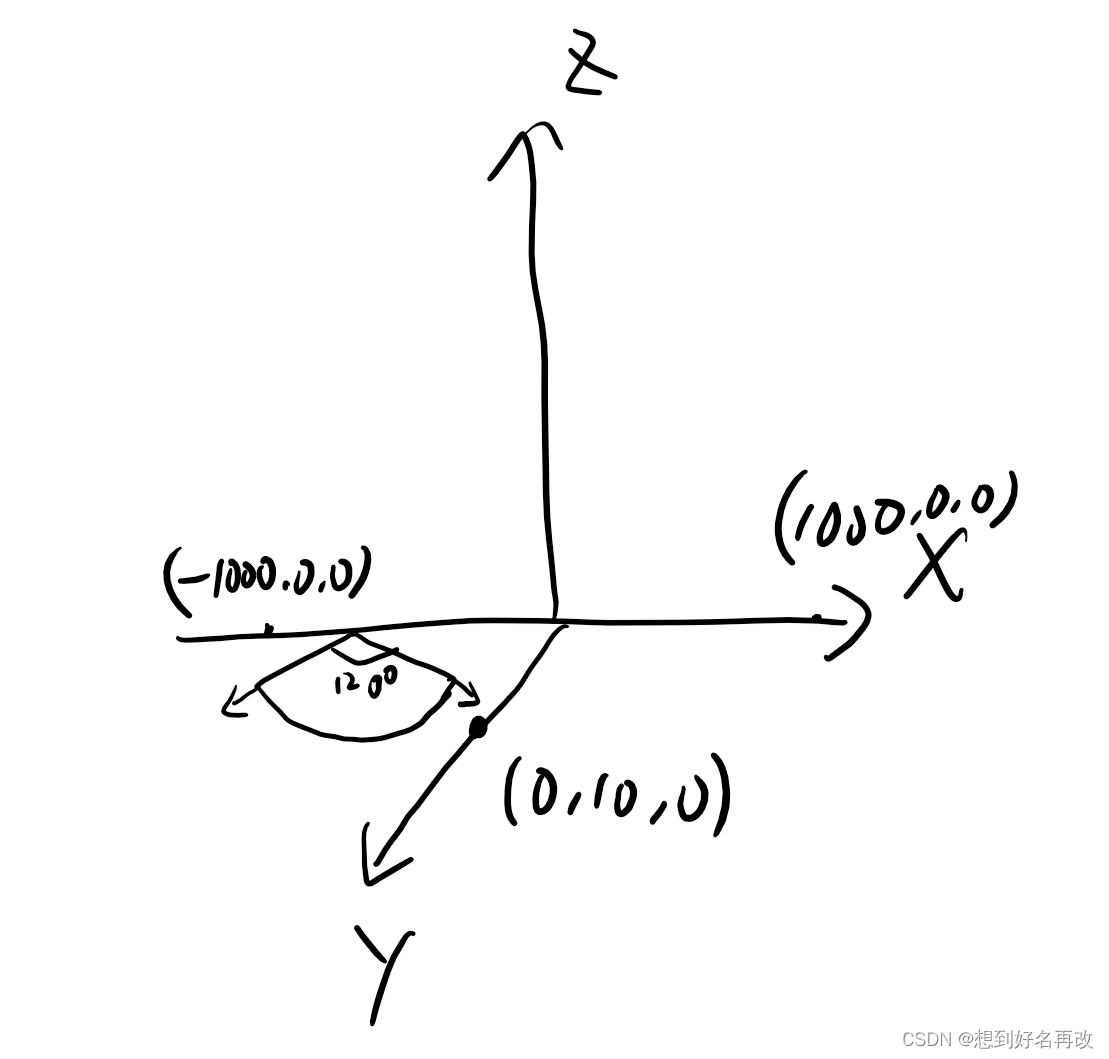
雷达延X轴运动,目标为Y轴上的一个点。
plot(tau)
% 回波
% size(Tfast) = 1*1600
% size(tau) = 1*4000
td = Tfast-tau.';
% td = Tfast-tau.';
% size(td) = 4000*1600
% 4000表示共雷达每个位置的延时,1600表示该时刻的回波,每次的回波区别在于延时不同
% Kr表示调频率
Srnm = exp(1j*2*pi*(Fc*td+1/2*Kr*td.^2)).*isFull.';
% size(Srnm) = 4000 * 1600
SrnmOri = exp(1j*2*pi*(Fc*Tfast+1/2*Kr*Tfast.^2)); % 参考信号
% conj表示复共轭
% size(conj(Srnm)) = 4000 * 1600
% size(SrnmOri) = 1 * 1600
SrnmFs = conj(Srnm).*SrnmOri; % 得到中频信号
% size(SrnmFs) = 4000 * 1600
% size(hamming(SamplePerChripUp)) = 1600 * 1
% Na = 4000
rwin = hamming(SamplePerChripUp)*ones(1,Na); % 汉明窗
% size(rwin) = 1600 * 4000
SrnmFs = SrnmFs.*rwin.';
加汉明窗之前
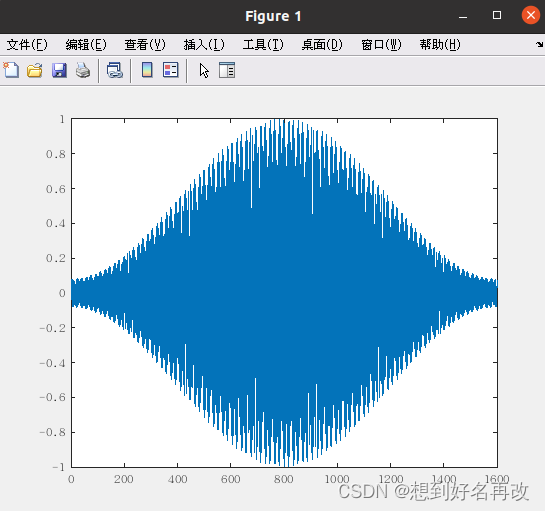
加汉明窗之后
% size(SrnmFs) = 4000 * 1600
% fft(X, n, dim)表示对X的第dim维进行傅里叶变换,n表示返回的点的数量
% SamplePerChripUp*N_up = 16000
SrnmFt = fft(SrnmFs,SamplePerChripUp*N_up,2); % 距离维FFT
% size(SrnmFt) = 4000 * 16000
dr = dr/N_up; % 更新距离分辨率
Nr = Nr*N_up; % 更新Nr
figure,plot((0:SamplePerChripUp*N_up-1)*dr,abs(SrnmFt(1000,:)));% 随便找个点看看
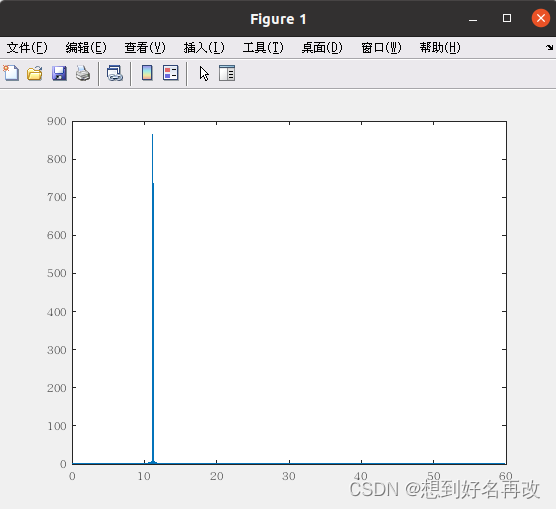
表示其中某一个时刻的中频
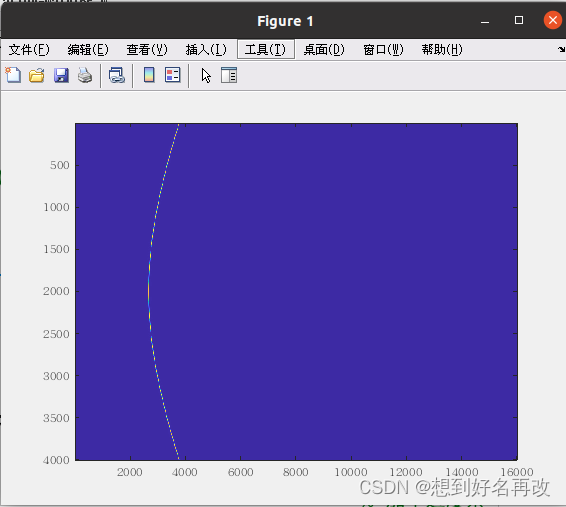
imagesc(abs(SrnmFt))
表示全部时刻的中频
% 开始构建成像区域
L = 0.1; % 基本距离单元(随便设得)
pix = 0.01; % 像素距离
x = -50*L:pix:50*L; % 构建x轴,我这里是方位维
y = (-50*L:pix:50*L)+TargetPos(2); % 以目标为中心构建y轴,对应距离维
[X,Y] = meshgrid(x,y); % 构建
img = zeros(size(x,2),size(y,2)); % 预构图像
h = waitbar(0,'正在BP计算'); % 加个进度条
if use_gpu
RadarPos = gpuArray(RadarPos);
X = gpuArray(X);
Y = gpuArray(Y);
SrnmFt = gpuArray(SrnmFt);
end
t_start = cputime;
for ix = 1:Na% Na = 4000
RadarPosNow = RadarPos(:,ix); % 找出现在的雷达位置
Ran = sqrt((RadarPosNow(1)-X).^2+(RadarPosNow(2)-Y).^2 ... % 计算当前时刻雷达和成像区域每一个点的距离
+RadarPosNow(3).^2);
Ran = Ran.*(acosd(Y./Ran)<=60); % 只考虑雷达照射范围内的点
deltaN = round(Ran/dr) + 1; % 计算距离对应的点数
deltaN_ij = (deltaN > 0 & deltaN <= Nr); % 考虑合理区间
deltaN = deltaN.*deltaN_ij + Nr*(1 - deltaN_ij); % 考虑合理区间
sig_rdta=SrnmFt(ix,:); % 找出当前时刻雷达采集到的数据
sig_rdta(Nr)=0; % 找出合理区间
img=img+sig_rdta(deltaN).*exp(1i*4*pi/lambda.*Ran); % 将成像区域每个点在该时刻雷达数据中的点进行对应
waitbar(ix/Na); % 更新进度条
end
close(h); % 关闭进度条
figure,imagesc(abs(img)); % 成像看看
t_end = cputime;
t_total = t_end - t_start;
t_total

















 3832
3832

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









