% 目标函数(需要最小化的目标)
% 这三个参数控制了快速反射镜模型的反射率和相位差,从而影响模型的性能表现。
% 在优化过程中,fmincon 函数将寻找最优的参数值,使得目标函数值最小化。
% 具体来说,目标函数的计算过程根据给定的参数值 x 来计算模型的输出 y,并将 y 的平均值作为目标函数的返回值。
% 在每次迭代过程中,fmincon 函数会不断更新参数值,直到找到满足约束条件的最优解。
function obj = fsm_obj(x)
global a b c
k = x(1); % k 是一个参数,用于调节指数衰减的速率。
alpha = x(2); % alpha 是一个参数,用于调节余弦项的频率。
beta = x(3); % beta 是一个参数,用于调节余弦项的相位。
t = 0:0.1:10;
y = a + b * exp(-k * t) .* cos(alpha * t + beta) + c * t;
% 表示了一个用于计算快速反射镜模型输出的公式。
% a 是模型的常数项,表示快速反射镜模型在 t = 0 时的初始值。
% b 是一个参数,用于调节指数衰减项的幅度。
% exp(-k * t) 是指数衰减项,它随着时间 t 的增加而递减。
% cos(alpha * t + beta) 是余弦项,它具有频率为 alpha 的振荡行为,并且通过相位 beta 进行了调整。
% c 是一个参数,用于调节线性项的斜率。
% c * t 是线性项,它随着时间 t 的增加而线性增加。
% 通过将这些项组合在一起,公式计算出快速反射镜模型在给定时间 t 上的输出值 y。
% 这个公式代表了快速反射镜模型中各个参数对输出结果的影响,通过优化这些参数的值,可以调整模型的性能以满足特定的优化目标。
obj = mean(y); % 目标函数为 y 的平均值
end
% 约束函数(k、alpha 和 beta 需要在一定范围内)
function [c, ceq] = fsm_constraints(x)
k = x(1);
alpha = x(2);
beta = x(3);
c = []; % 不等式约束
ceq = [k + alpha + beta - 1]; % 等式约束
end
% 主函数
function fsm_optimization()
global a b c
a = 1;
b = 2;
c = 0.5;
% 设置初始参数值
x0 = [0.5, 0.5, 0.5];
% 设置优化问题的上下界
lb = [0, 0, 0];
ub = [1, 1, 1];
% 设置约束条件函数
nonlcon = @fsm_constraints;
% 设置优化选项 iter迭代次数
options = optimoptions('fmincon', 'Display', 'iter');
% 执行优化
[x_opt, fval] = fmincon(@fsm_obj, x0, [], [], [], [], lb, ub, nonlcon, options);
% 打印优化结果
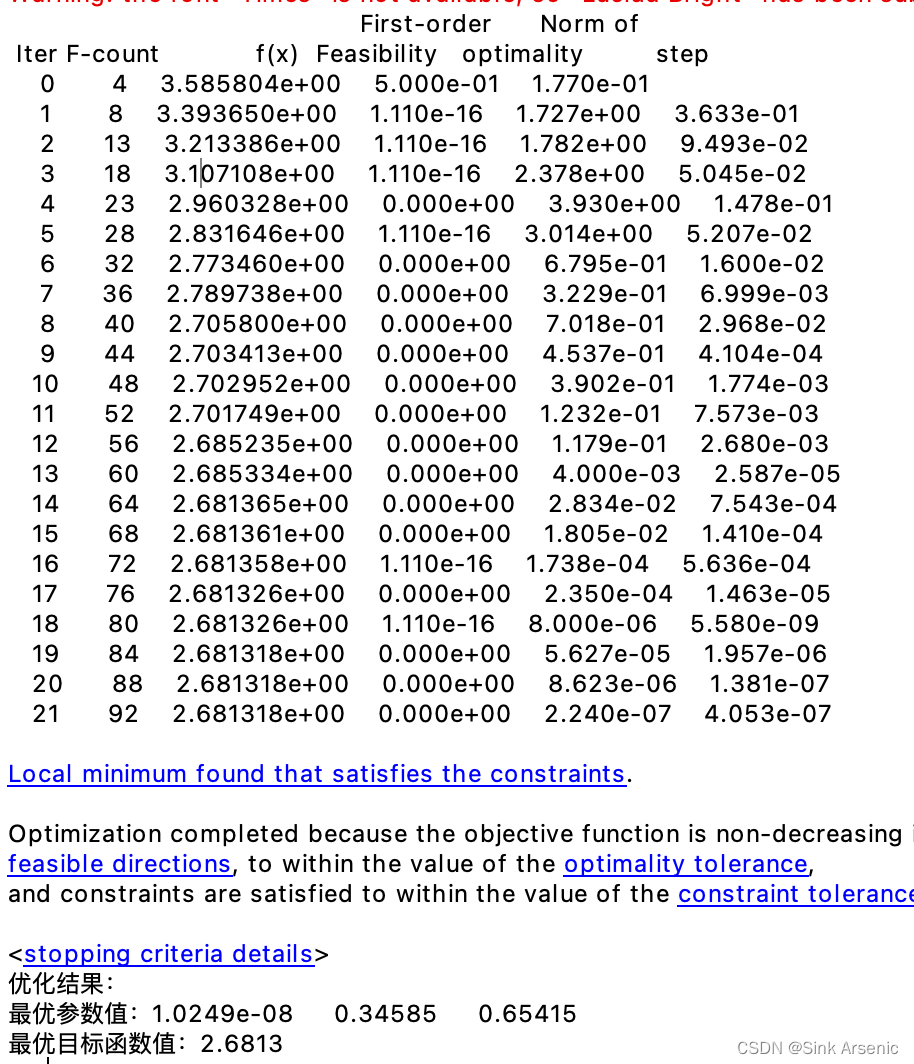
disp('优化结果:');
disp(['最优参数值:', num2str(x_opt)]);
disp(['最优目标函数值:', num2str(fval)]);
end
% 全局变量定义
global a b c
% 调用主函数进行优化
fsm_optimization();

























 3602
3602

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











