







优点
实时性:在线参数辨识能够在电机实际运行时进行参数估计,可以实时地获取电机的参数信息。这使得在线参数辨识更适用于需要实时调节和优化电机控制策略的应用场景。
动态适应性:在线参数辨识可以根据电机的实时工作状态和环境变化来动态地调整和更新参数估计。电机的参数在运行过程中可能会发生变化,如温度变化、磁场衰减等,通过在线参数辨识可以实时地对这些变化进行补偿和校正,提高系统的鲁棒性和性能。
省时省力:在线参数辨识不需要事先进行大量的实验或测试来收集离线数据集,而是直接利用电机实时运行时的数据进行参数估计。这节省了实验和数据采集的时间和劳力成本,使得参数辨识过程更加简化和高效。
真实环境反映:在线参数辨识可以在真实的工作环境中进行,能够充分考虑电机的实际运行状况和外部干扰因素。相比之下,离线参数辨识可能会受到实验条件、测量误差和环境因素等的影响,无法完全反映真实的工作环境。
尽管在线参数辨识具有上述优点,但也需要注意其一些限制。在线参数辨识方法对于数据的准确性和实时性要求
改进方向 略
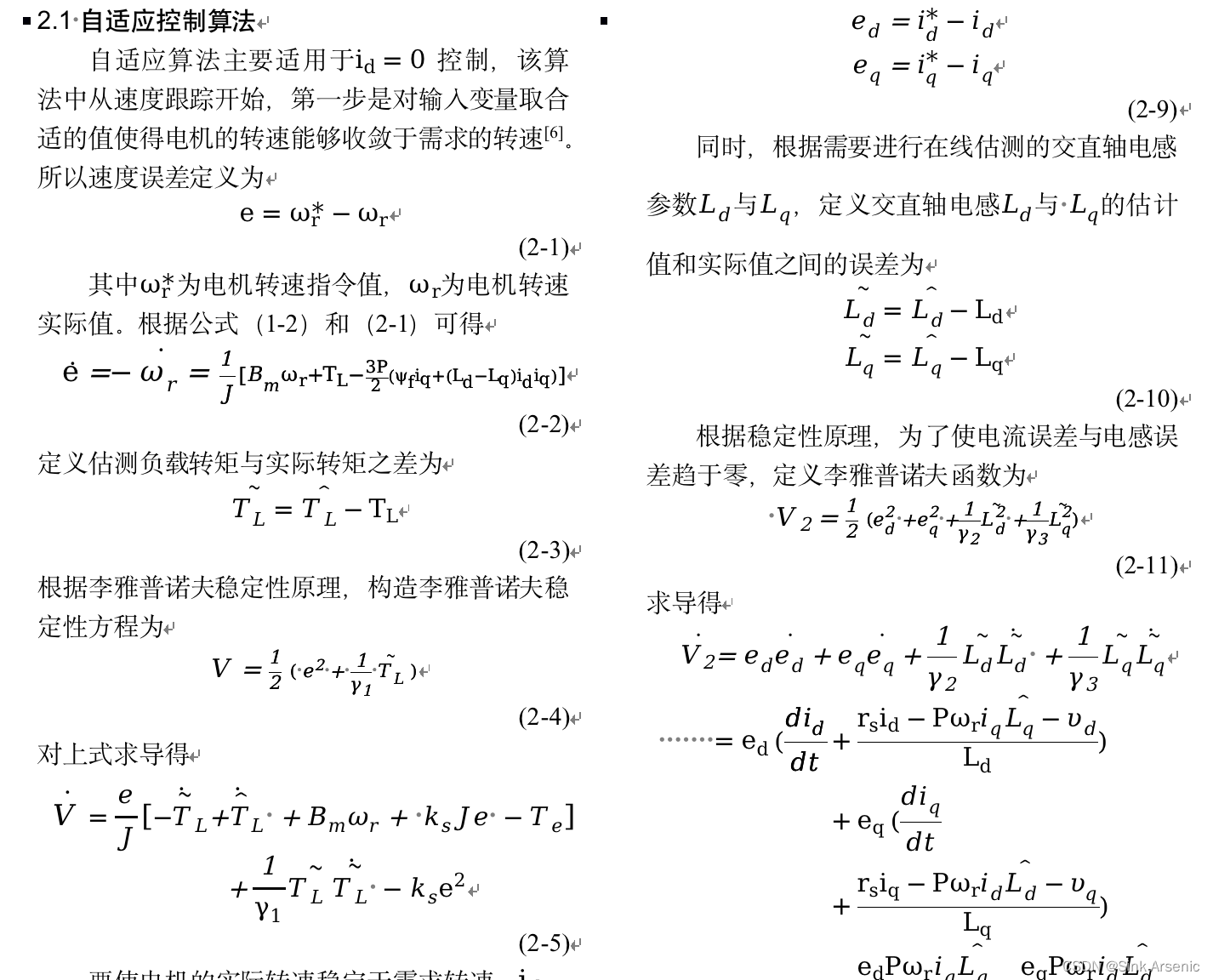
模型自适应
一堆公式
模型自适应法:
方法原理:模型自适应法基于模型参考自适应控制的思想,利用适应算法辨识和调整电机的参数。该方法适用于非线性系统和参数变化较大的情况。
优点:适应性强,能够适应电机参数的变化和非线性特性。对于参数变化较快的系统,模型自适应法能够提供较为准确的参数估计。
缺点:对于算法设计和参数调整要求较高,需要较多的实时计算资源。此外,模型自适应法可能存在收敛性和抗干扰能力的挑战。
综合评估: 根据不同的应用需求和系统特性,选择最合适的方法。最小二乘法适用于线性系统的参数辨识,计算简单高效;卡尔曼滤波法适用于线性和高斯噪声的系统,具有较好的滤波效果;模型自适应法适用于非线性系统和参数变化较大的情况,具有较强的适应性。在实际应用中,应综合考虑系统特性、计算复杂度和参数估计准确性等因素,选择最适合的方法。同时,实验验证和系统实际运行中的性能表现也是评估方法优劣的重要依据。
最小二乘法
最小二乘法:
方法原理:最小二乘法通过最小化实际观测值与模型预测值之间的残差平方和来辨识参数。该方法假设观测误差符合高斯分布,适用于线性系统的参数辨识。
优点:实现简单,计算效率高,适用于线性系统的参数辨识。对于高质量的测量数据,最小二乘法能够提供较准确的参数估计。
缺点:对观测误差的假设较为严格,对于非线性系统和存在噪声的测量数据,准确性可能下降
卡尔曼滤波
卡尔曼滤波适用于线性系统,其噪声必须是高斯噪声且系统的状态方程应为已知的方程。卡尔曼滤波模型如图所示。
图3 卡尔曼滤波模型
图3中,、分别为状态变量和测量值。
作为一种最大后验估计算法,卡尔曼滤波的基本步骤为:基于马尔科夫链结合贝叶斯定理,通过时刻的后验概率密度推导出时刻的后验概率密度函数的递推形式,即基于模型的预测与测量的更新。
Permanent magnet synchronous motors are widely used in the field of electric vehicles due to their lightweight, high efficiency, and strong reliability. Ordinary motor control algorithms can have good control performance under stable operating conditions, but in the complex working conditions of electric vehicles, motor parameters may change due to external conditions, and fixed and unchanging control parameters can be adjusted based on the changing motor parameters, which will reduce control performance. In order to maintain or even improve the control performance of the motor, it is of great significance to identify the motor parameters in real-time during operation and provide feedback to improve the original control parameters of the motor. This article introduces the method of vector control and analyzes the online parameter identification technology of permanent magnet synchronous motors. Through a comprehensive analysis of existing research work, the application of different methods in parameter identification of permanent magnet synchronous motors and their respective advantages and disadvantages were summarized. This article also explores possible future research directions and improvement suggestions.
参考文献
参考文献
张妍. 永磁同步电机在线参数辨识方法研究[D].黑龙江大学,2021.DOI:10.27123/d.cnki.ghlju.2021.000076.
[1]胡升. 低速大转矩永磁同步电机在线参数辨识策略研究[D].天津大学,2012.
[1]石建飞,戈宝军,吕艳玲,韩继超.永磁同步电机在线参数辨识方法研究[J].电机与控制学报,2018,22(03):17-24.DOI:10.15938/j.emc.2018.03.003.
沈艳霞,刘永钦.基于改进型模型参考自适应的 PMSM 参数辨识[J].电气 传动,2009,39(5).
Orlowska-Kowalska T,Dybkowski M.Stator-current-based MRAS estimator
for a wide range speed-sensorless induction-Motor Drive[J].IEEE Transactions
on Industrial Applications,2010,57(4):1296-1308.
[51] Cirrincione M,Accetta A,Pucci M,et al.MRAS speed observer for
high-performance linear induction motor drives based on linear neural
networks[J].IEEE Transactions on Industrial Electronics,2013,28(1): 123-134.
[52] Cirrincione M,Pucci M,Cirrincione G,et al.A new TLS-based MRAS speed estimation with adaptive integration for high-performance induction machine drives[J].IEEE Transactions on Industrial Electronics,2004,40(4):1116-1137
[58] L. Liu,D.A. Cartes.Synchronization based adaptive parameter identification for permanent magnet synchronous motors[J].IET Conrtol Theory&Applicat, 2007,1(4):1015-1022.
[59] Q An,Li Sun.On-line parameter identification for vector controlled PMSM drives using adaptive algorithm[C].VPAPC,Harbin,China,2001:1-6.马雷,杨荣.永磁同步电机参数测定[J].微特电机,1992,5(7):6-7.
[25]. 文传博, 齐亮. 永磁同步电机磁链信息在线监测的新方法[J]. 电力系统及其 自动化学报, 2010, 22(2): 22-26.
[26]. 史宇超, 孙凯, 马鸿雁, 等. 内埋式永磁同步电机永磁磁链的在线辨识[J]. 电工技术学报, 2011, 26(9): 48-53.
[27]. Shi Y, Sun K, Huang L, et al. Online identification of permanent magnet flux based on extended Kalman filter for IPMSM drive with position sensorless control[J]. IEEE Transactions on Industrial Electronics, 2012, 59(11): 4169-4178.
[63] Iwata H,Sugano S.Human-robot-contact-state identification based on tactile recognition[J].IEEE Transaction on Industrial Electronics.2005,52(6): 1468-1477.
[64] Adly A.A,Abd-El-Hafiz S.K.Using neural networks in the identification of Preisach-type hysteresis models[J].IEEE Transaction on Magnetics.2005, 34(3):629-635.
[1]王利辉,张旭,张伟锋.基于神经网络的永磁同步电机参数辨识[J].电力电子技术,2020,54(05):47-49.
[1]荆禄宗,吴钦木.基于递归神经网络的永磁同步电机参数辨识研究[J].电气传动,2020,50(03):87-91+101.DOI:10.19457/j.1001-2095.dqcd19259.

自己写的研究生课程作业综述,需要的🐟搜该用户不存在 1949



















 2281
2281

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











