







前言
今天分享这个主要原因是,把最基础的EMIO接口弄清楚咋操作的,咱们就可以做一些由PS端控制PL端的器件小功能,最常见的就是我们驱动某些图像传感器时,需要配置一些信号啥的,包括复位信号,休眠信号这些(对,我说的就是你,ov5640的rst和pwdn信号),学会了最基础的操作,用你聪明的小脑壳去拓展一下,多玩玩你就熟悉了。
一、EMIO是啥含义
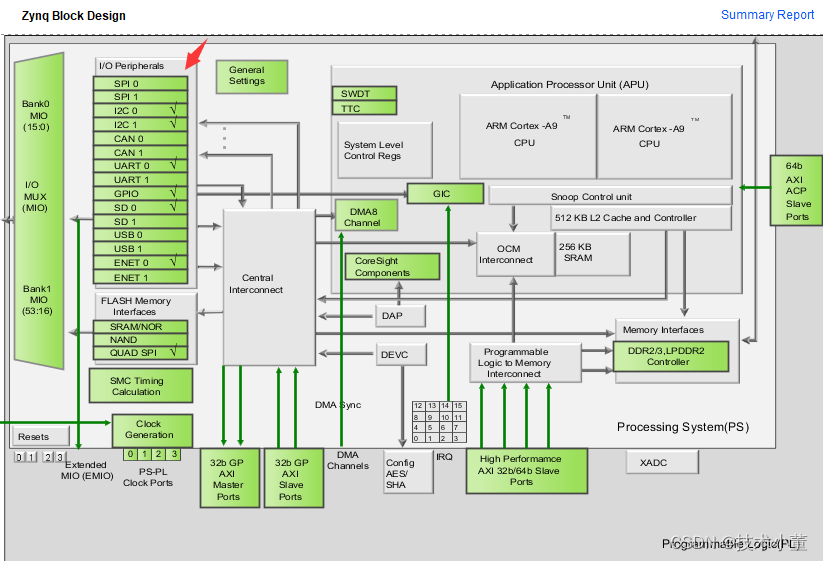
网上一大堆对于EMIO接口的介绍,话不多说,我直接给出自己的理解。Zynq它分为PL和PS两大单元,PS其实是主要的控制单元,PL你可以看作是挂载到PS上的一个外设,专门用来做一些数据量比较大的、需要并行进行处理的工作。而PS其实跟我们的单片机差不多,带有浮点数运算,做一些对速度、实时性没什么要求的操作。
它这个PS上面引出来的接口中,有两个接口分别是MIO接口和EMIO接口,这两个整体就被称之为GPIO口。那么MIO接口其实它是固定在PS上面的,它是没有办法被映射到PL上面去的,你可以认做它是属于PS的专用接口。而EMIO不同,我觉得它就是一个外部接口,它可以被配置并且被映射到PL端去,具体怎么被映射,其实就是你在Zynq核里面把EMIO接口配置好,然后把这个接口从bd里面引出来,再到PL端的v文件把这个引脚例化出来即可。
EMIO和MIO接口都属于GPIO接口,各自有对应的引脚号,其中MIO引脚号是0-53,EMIO是54-117号引脚
二、两种EMIO的使用
1.PS端外设引出来的EMIO
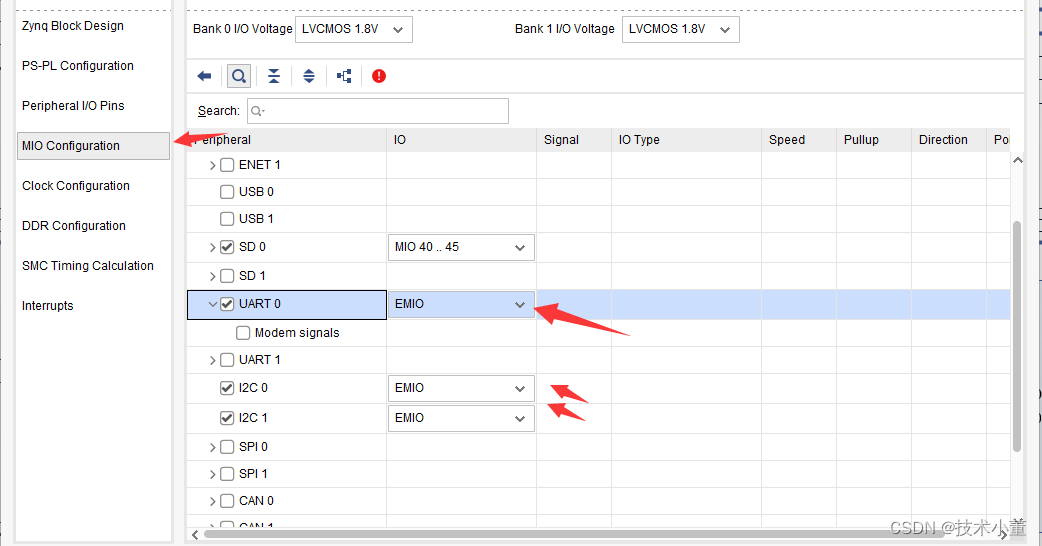
我们的接口其实是可以配置成很多功能的,比如I2C,比如UART。这两种比较通用的接口就可以配置成EMIO接口输出,由于这都是直接引用的PS端代码去进行驱动的,我们只需要在PS端去写入数据即可,然后把这个引出来的EMIO接口在PL端进行例化,跟你的外设对应好。比如你如果PL端弄了一个串口,那么你就可以把tx和rx两个接口通过EMIO接口引出去,然后约束成你串口对应的引脚号,这样你PS端发送的数据就可以通过PL端的串口输出了。
具体就是在MIO Configuration里面将想要输出的外设口勾选,并且把MIO的接口改成EMIO接口,这样你的接口才能顺利导出到PL端。
在bd里面将这几个接口make external即可,这种接口一般只需要跟我们外部驱动的引脚连接在一起即可,将bd文件例化后添加到我们的顶层文件中,配置好管脚信号的约束即可。其余如果想驱动这几个管脚的话只需要在PS端进行操作,比如你串口在PL端,那么只需要在PS端操作xil_printf这个函数即可。

2.正常的EMIO口
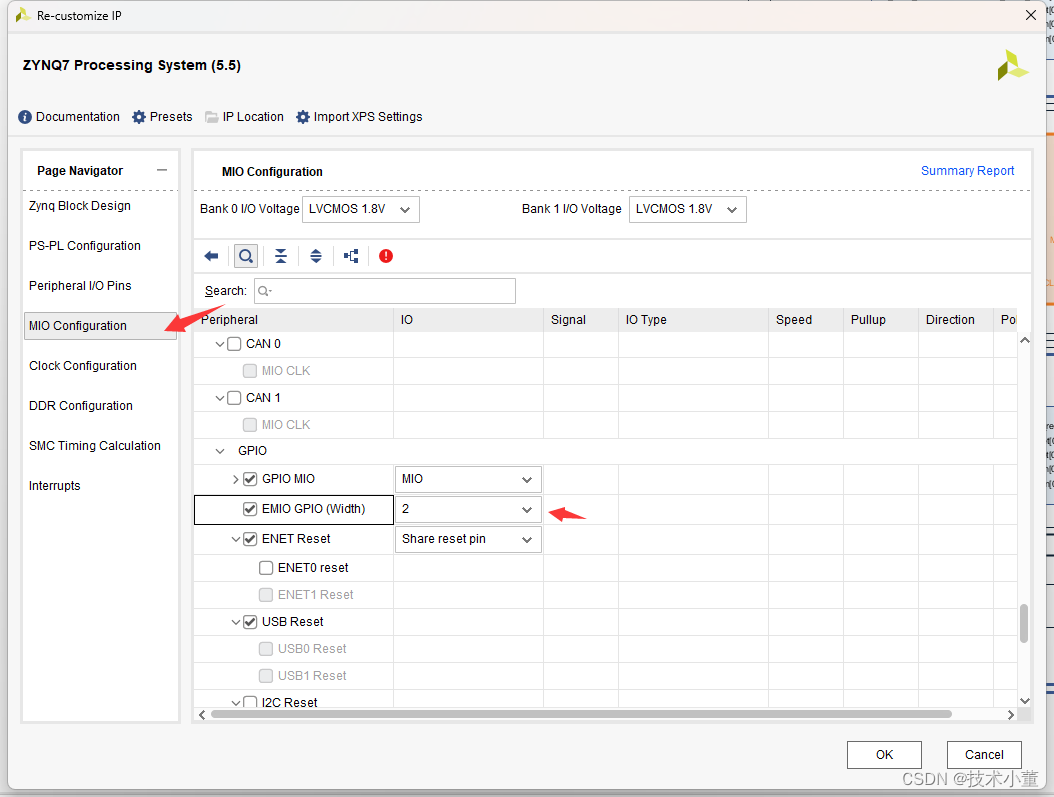
另外一种EMIO口就是我们专门去设置并且引出来,同样是MIO_Configuration,我们找到GPIO口对应的地方,同时勾选EMIO GPIO,选择位宽为2位(因为此处设计是ov5640的rst和pwdn引脚),点击勾选ok以后即可。
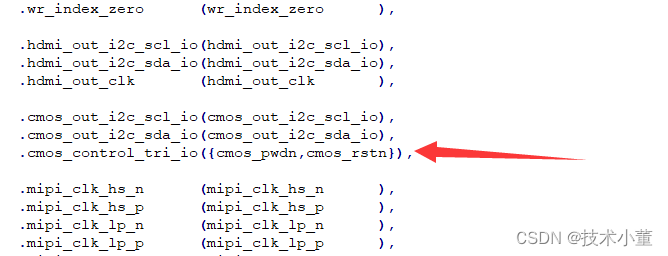
cmos_control引脚就是我们要引出的cmos控制信号,我们在bd里面可以例化出来。
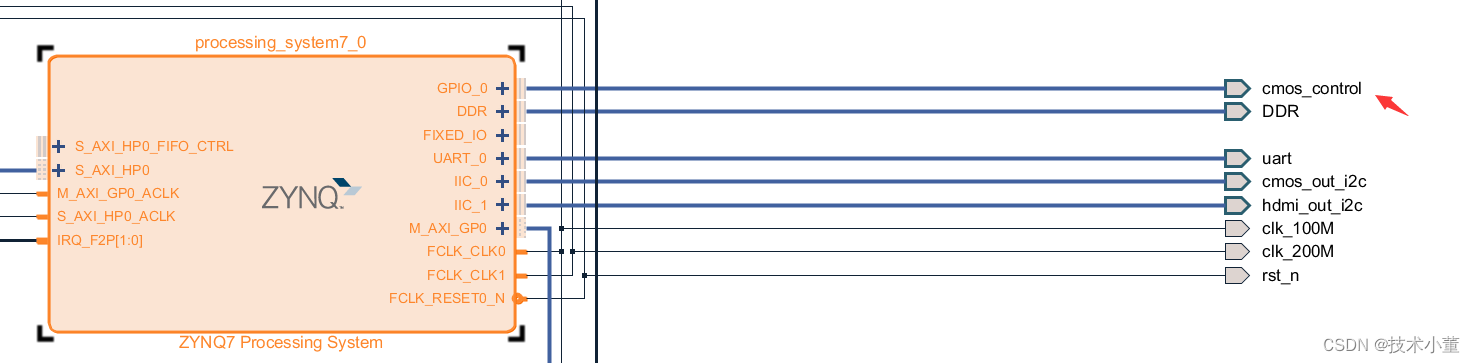
我喜欢的例化方式是通过位拼接去例化,因为这里面带着我要驱动的两个信号,例化的格式是高位在前,低位在后。因为EMIO口对应引脚号54-117,故cmos_rstn这个信号就是54引脚号,cmos_pwdn是55引脚号。
3.PS端驱动源码
完成了例化以后,我们就可以打开PS端了,可以直接新建一个c和h文件,名字您随意,代码我附在下面
在GPIO的c文件中,我们只需要改动XGpioPs_SetDirectionPin和XGpioPs_SetOutputEnablePin函数,其中前者是设置我们接口的方向,1代表输出,0代表输入。后者是使能我们的端口,1是使能,0是不使能。rstn和pwdn都在GPIO的h文件中定义了。
#include "gpio.h"
int PsGpioSetup()
{
XGpioPs_Config *GPIO_CONFIG ;
int Status ;
GPIO_CONFIG = XGpioPs_LookupConfig(XPAR_XGPIOPS_0_DEVICE_ID) ;
Status = XGpioPs_CfgInitialize(&Gpio, GPIO_CONFIG, GPIO_CONFIG->BaseAddr) ;
if (Status != XST_SUCCESS)
{
return XST_FAILURE ;
}
XGpioPs_SetDirectionPin(&Gpio, rstn, 1) ;
XGpioPs_SetOutputEnablePin(&Gpio, rstn, 1);
XGpioPs_SetDirectionPin(&Gpio, pwdn, 1) ;
XGpioPs_SetOutputEnablePin(&Gpio, pwdn, 1);
return XST_SUCCESS ;
}
#ifndef _GPIO_H_
#define _GPIO_H_
#include "xgpiops.h"
#define rstn 54
#define pwdn 55
XGpioPs Gpio;
int PsGpioSetup() ;
#endif
在我们的主函数中进行调用即可,格式如下面的代码所示,这样就可以对rstn和pwdn进行配置了。
PsGpioSetup() ;
XGpioPs_WritePin(&Gpio, rstn, 0) ;//cmos_rstn
usleep(10000);
XGpioPs_WritePin(&Gpio, pwdn, 0) ;//cmos_pwdn
usleep(1000000);
XGpioPs_WritePin(&Gpio, rstn, 1) ;//复位成功,正式进行配置
usleep(1000000);
总结
今天晚上本来点卤肉饭来着,结果店家说没有了,给我换了猪脚饭,味道还可以,就是肉稍微肥了一点,配上一杯酸梅汁儿,味道真不错。人生三大乐事,写代码,健身,吃饭















 64
64











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









