







 本文深入介绍了SPI总线的原理及其在DS1302实时时钟模块上的应用,包括SPI驱动代码解析、DS1302的读写操作流程和实现细节,以及如何通过SPI接口与DS1302交互,实现时间日期的读取和设置。
本文深入介绍了SPI总线的原理及其在DS1302实时时钟模块上的应用,包括SPI驱动代码解析、DS1302的读写操作流程和实现细节,以及如何通过SPI接口与DS1302交互,实现时间日期的读取和设置。
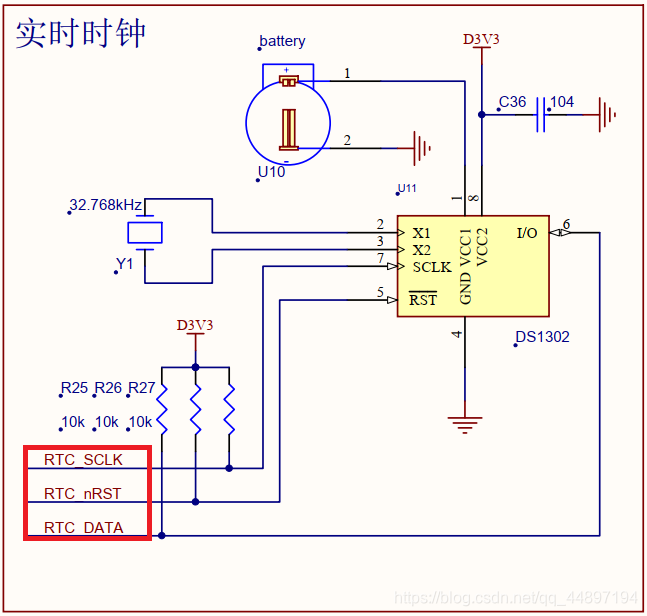
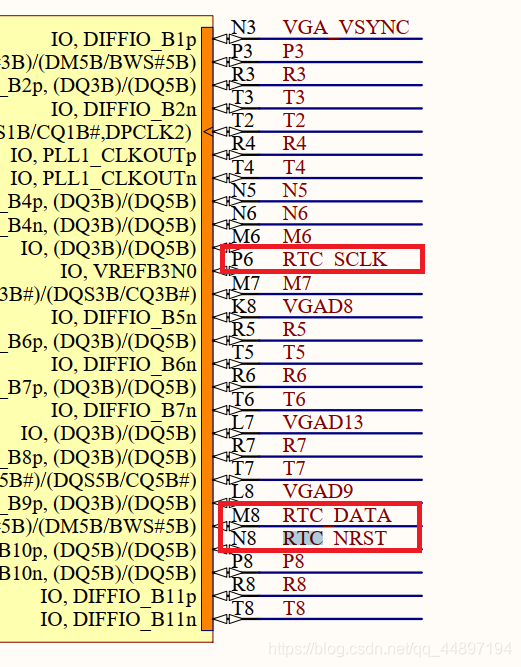
一.原理图
二.SPI驱动及代码解释
此实验采用黑金的代码!
和之前IIC介绍相同,先单独介绍SPI的底层驱动模块。具体的SPI协议此处不做详细介绍。
底层的SPI驱动是以标准的四线SPI编写。
1.端口定义、I/O说明和变量声明
module spi_master(
input sys_clk,
input rst,
output nCS, //SPI片选输出信号
output DCLK, //SPI时钟
output MOSI, //SPI的MOSI,主机发送
input MISO, //SPI的MISO,主机接收
input CPOL, //SPI极性,=0表示时钟空闲低电平;=1表示时钟空闲高电平
input CPHA, //SPI相位,=0表示第一个边沿触发,=1表示第二个边沿触发
input nCS_ctrl, //片选控制
input[15:0] clk_div, //时钟分频
input wr_req, //写请求触发信号
output wr_ack, //传输结束反馈信号
input[7:0] data_in, //要写的数据
output[7:0] data_out //读到的数据
);
localparam IDLE = 0; //空闲状态
localparam DCLK_EDGE = 1; //时钟产生边沿状态
localparam DCLK_IDLE = 2; //时钟空闲(等待)状态
localparam ACK = 3; //返回结束信号状态
localparam LAST_HALF_CYCLE = 4; //最后一个边沿状态
localparam ACK_WAIT = 5;
reg DCLK_reg; //暂存时钟输出信号
reg[7:0] MOSI_shift; //暂存要写的数据
reg[7:0] MISO_shift; //暂存读到的数据
reg[2:0] state; //当前状态
reg[2:0] next_state; //下一个状态
reg [15:0] clk_cnt; //时钟等待计数器
reg[4:0] clk_edge_cnt; //时钟边沿计数器
2.寄存值输出
assign MOSI = MOSI_shift[7]; //输出最高位
assign data_out = MISO_shift; //读到的数据输出
assign nCS = nCS_ctrl; //片选控制直接由输入转到输出
assign DCLK = DCLK_reg; //时钟寄存后输出
assign wr_ack = (state == ACK); //获得传输结束信号
3.SPI的CLK配置
此语句块用于产生SPI驱动所需的CLK(时钟线)脉冲信号
//SPI时钟线CLK状态机
always@(posedge sys_clk or posedge rst)
begin
if(rst)
state <= IDLE;
else
state <= next_state;
end
always@(*)
begin
case(state)
IDLE: //SPI空闲状态
if(wr_req == 1'b1)
next_state <= DCLK_IDLE;
else
next_state <= IDLE;
DCLK_IDLE: //触发后,时钟先等待clk_div个系统时钟周期
if(clk_cnt == clk_div)
next_state <= DCLK_EDGE;
else
next_state <= DCLK_IDLE;
DCLK_EDGE: //SPI时钟线开始产生8个时钟脉冲,每个系统时钟上升沿改变一次SPI时钟电平
if(clk_edge_cnt == 5'd15) //当计到第15个边沿时进入下一个状态,此时还差最后一个边沿
next_state <= LAST_HALF_CYCLE;
else
next_state <= DCLK_IDLE;
LAST_HALF_CYCLE: //准备最后一个边沿状态
if(clk_cnt == clk_div) //时钟等待clk_div个系统时钟周期
next_state <= ACK;
else
next_state <= LAST_HALF_CYCLE;
ACK: //响应状态
next_state <= ACK_WAIT;
//等待一个系统时钟周期,确定结束信号
ACK_WAIT:
next_state <= IDLE;
default:
next_state <= IDLE;
endcase
end
//SPI时钟线产生时钟脉冲
always@(posedge sys_clk or posedge rst)
begin
if(rst)
DCLK_reg <= 1'b0;
else if(state == IDLE)
DCLK_reg <= CPOL; //空闲时时钟恢复空闲极性
else if(state == DCLK_EDGE) //SPI时钟线每个系统时钟上升沿改变一次电平,产生时钟脉冲
DCLK_reg <= ~DCLK_reg; //相当于系统时钟的2分频
end
//SPI时钟线等待时间计数(传输开始和结束时使用)
always@(posedge sys_clk or posedge rst)
begin
if(rst)
clk_cnt <= 16'd0;
else if(state == DCLK_IDLE || state == LAST_HALF_CYCLE)
clk_cnt <= clk_cnt + 16'd1;
else
clk_cnt <= 16'd0;
end
//SPI时钟边沿个数计数器
always@(posedge sys_clk or posedge rst)
begin
if(rst)
clk_edge_cnt <= 5'd0;
else if(state == DCLK_EDGE) //CLK每改变一次电平计数器加1
clk_edge_cnt <= clk_edge_cnt + 5'd1;
else if(state == IDLE)
clk_edge_cnt <= 5'd0;
end
4.读写时序描述
时序图:
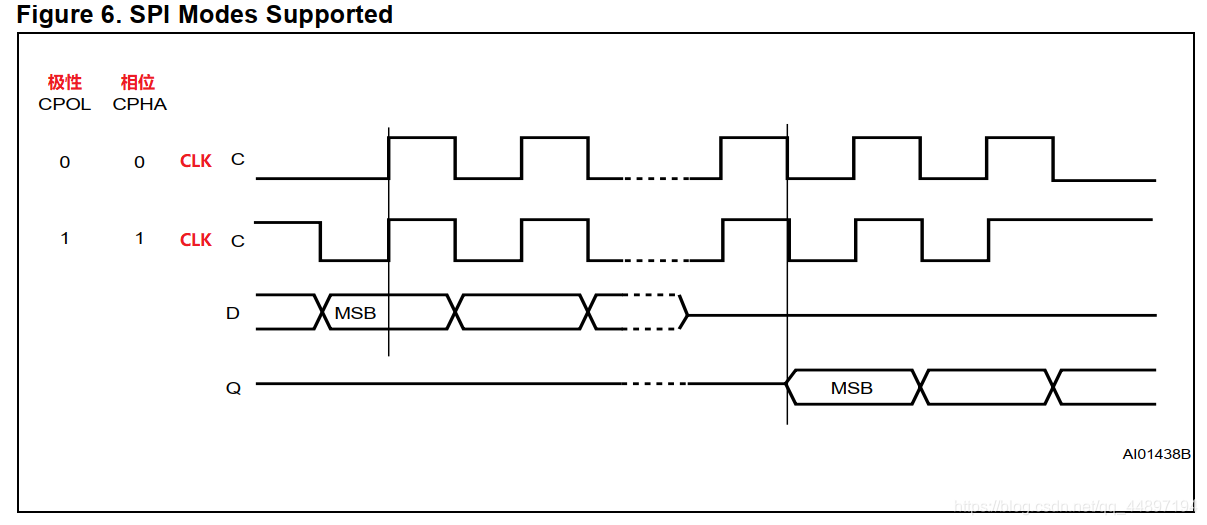
读/写数据:要在时钟有效触发边沿到来之前把要读/写的位准备好。
//SPI写数据
always@(posedge sys_clk or posedge rst)
begin
if(rst)
MOSI_shift <= 8'd0;
else if(state == IDLE && wr_req)
MOSI_shift <= data_in; //一旦触发立即把要写的数据传递到寄存器
else if(state == DCLK_EDGE) //工作在边沿触发状态
if(CPHA == 1'b0 && clk_edge_cnt[0] == 1'b1) //第一个边沿触发且第二个边沿刚好到来(因此还未加1)
MOSI_shift <= {MOSI_shift[6:0],MOSI_shift[7]}; //准备下一位,把第6高位调到最高位
else if(CPHA == 1'b1 && (clk_edge_cnt != 5'd0 && clk_edge_cnt[0] == 1'b0)) //每个CLK的第二个边沿
MOSI_shift <= {MOSI_shift[6:0],MOSI_shift[7]};
end
//SPI读数据,流程与写数据类似
always@(posedge sys_clk or posedge rst)
begin
if(rst)
MISO_shift <= 8'd0;
else if(state == IDLE && wr_req)
MISO_shift <= 8'h00;
else if(state == DCLK_EDGE)
if(CPHA == 1'b0 && clk_edge_cnt[0] == 1'b0) //此处的if判断还未理解
MISO_shift <= {MISO_shift[6:0],MISO}; //把刚读到的位放到最低位
else if(CPHA == 1'b1 && (clk_edge_cnt[0] == 1'b1))
MISO_shift <= {MISO_shift[6:0],MISO};
end
endmodule
三.DS1302的读写
DS1302的读写时序图:

1.ds1302_io.v
此模块是对ds1302的完整地读/写字节过程进行封装(先写地址再读/写数据)。底层是SPI驱动模块。
ds1302采用的实际是三线SPI,即将MISO和MOSI两根线合并,从全双工变成半双工。
module ds1302_io(
input clk,
input rst,
output ds1302_ce, //ds1302的ce片选脚
output ds1302_sclk, //ds1302的时钟管脚
inout ds1302_io, //ds1302的数据管脚
input cmd_read, //读命令
input cmd_write, //写命令
output cmd_read_ack,
output cmd_write_ack,
input[7:0] read_addr, //读数据的地址
input[7:0] write_addr, //写数据的地址
output reg[7:0] read_data, //读到的数据
input[7:0] write_data //要写的数据
);
localparam S_IDLE = 0; //空闲状态
localparam S_CE_HIGH = 1; //片选置高状态
localparam S_READ = 2; //读操作过渡状态
localparam S_READ_ADDR = 3; //写入要读的地址
localparam S_READ_DATA = 4; //读数据状态
localparam S_WRITE = 5; //写操作过渡状态
localparam S_WRITE_ADDR = 6; //写入要写的地址
localparam S_WRITE_DATA = 7; //写数据状态
localparam S_CE_LOW = 8; //片选拉低状态
localparam S_ACK = 9; //流程结束反馈状态
reg[3:0] state, next_state;
reg[19:0] delay_cnt;
reg wr_req; //SPI读写请求触发信号,实例化SPI模块
wire wr_ack; //SPI操作结束信号,实例化SPI模块
reg CS_reg; //暂存片选信号,实例化SPI模块
wire DCLK; //SPI的时钟线,实例化SPI模块
wire MOSI; //SPI的MOSI,实例化SPI模块
wire MISO; //SPI的MISO,实例化SPI模块
reg[7:0] send_data; //暂存需要写入的数据,实例化SPI模块
wire[7:0] data_rec; //暂存读到的数据,实例化SPI模块
reg ds1302_io_dir; //数据线方向,=0写输出(高阻态),=1读输入
assign ds1302_io = ~ds1302_io_dir ? MOSI : 1'bz; //数据管脚方向,输出或者高阻态
assign MISO = ds1302_io; //把MISO和MOSI合并到di1302_io上,变成三线SPI
//assign ds1302_ce = CS_reg;
assign ds1302_sclk = DCLK;
assign cmd_read_ack = (state == S_ACK);
assign cmd_write_ack = (state == S_ACK);
//ds1302数据流状态机
always@(posedge clk or posedge rst)
begin
if(rst)
state <= S_IDLE;
else
state <= next_state;
end
always@(*)
begin
case(state)
S_IDLE: //空闲
if(cmd_read || cmd_write) //有读或写的命令
next_state <= S_CE_HIGH;
else
next_state <= S_IDLE;
S_CE_HIGH: //片选拉高
if(delay_cnt == 20'd255) //延时
next_state <= cmd_read ? S_READ : S_WRITE; //判断读或写
else
next_state <= S_CE_HIGH;
S_READ:
next_state <= S_READ_ADDR;
S_READ_ADDR: //写入要读的地址
if(wr_ack) //传输结束
next_state <= S_READ_DATA;
else
next_state <= S_READ_ADDR;
S_READ_DATA: //读数据
if(wr_ack)
next_state <= S_ACK;
else
next_state <= S_READ_DATA;
S_WRITE:
next_state <= S_WRITE_ADDR;
S_WRITE_ADDR: //写入要写的地址
if(wr_ack)
next_state <= S_WRITE_DATA;
else
next_state <= S_WRITE_ADDR;
S_WRITE_DATA: //写数据
if(wr_ack)
next_state <= S_ACK;
else
next_state <= S_WRITE_DATA;
S_ACK: //准备结束
next_state <= S_CE_LOW;
S_CE_LOW:
if(delay_cnt == 20'd255) //延时然后进入空闲状态
next_state <= S_IDLE;
else
next_state <= S_CE_LOW;
default:next_state <= S_IDLE;
endcase
end
//片选信号控制
always@(posedge clk or posedge rst)
begin
if(rst)
CS_reg <= 1'b0;
else if(state == S_CE_HIGH)
CS_reg <= 1'b1;
else if(state == S_CE_LOW)
CS_reg <= 1'b0;
end
//片选信号改变后延时
always@(posedge clk or posedge rst)
begin
if(rst)
delay_cnt <= 20'd0;
else if(state == S_CE_HIGH || state == S_CE_LOW)
delay_cnt <= delay_cnt + 20'd1;
else
delay_cnt <= 20'd0;
end
//配置SPI请求触发信号
always@(posedge clk or posedge rst)
begin
if(rst)
wr_req <= 1'b0;
else if(wr_ack)
wr_req <= 1'b0;
else if(state == S_READ_ADDR || state == S_READ_DATA || state == S_WRITE_ADDR || state == S_WRITE_DATA)
wr_req <= 1'b1; //该四种状态需要触发SPI驱动
end
//改变数据口方向
always@(posedge clk or posedge rst)
begin
if(rst)
ds1302_io_dir <= 1'b0;
else
ds1302_io_dir <= (state == S_READ_DATA);
end
//将SPI驱动模块读到的数据输出
always@(posedge clk or posedge rst)
begin
if(rst)
read_data <= 8'h00;
else if(state == S_READ_DATA && wr_ack)
read_data <= {data_rec[0],data_rec[1],data_rec[2],data_rec[3],data_rec[4],data_rec[5],data_rec[6],data_rec[7]}; //把读到的数据高低位反转,因为实际先读
end
//把要写的地址或数据传给SPI驱动模块的输入
always@(posedge clk or posedge rst)
begin
if(rst)
send_data <= 8'h00;
else if(state == S_READ_ADDR) //低位在前高位在后,先写低位
send_data <= {1'b1,read_addr[1],read_addr[2],read_addr[3],read_addr[4],read_addr[5],read_addr[6],1'b1};
else if(state == S_WRITE_ADDR)
send_data <= {1'b0,write_addr[1],write_addr[2],write_addr[3],write_addr[4],write_addr[5],write_addr[6],1'b1};
else if(state == S_WRITE_DATA)
send_data <= {write_data[0],write_data[1],write_data[2],write_data[3],write_data[4],write_data[5],write_data[6],write_data[7]};
end
//实例化SPI驱动模块
spi_master spi_master_m0(
.sys_clk(clk),
.rst(rst),
.nCS(ds1302_ce),
.DCLK(DCLK),
.MOSI(MOSI),
.MISO(MISO),
.CPOL(1'b0),
.CPHA(1'b0),
.nCS_ctrl(CS_reg),
.clk_div(16'd50),
.wr_req(wr_req),
.wr_ack(wr_ack),
.data_in(send_data),
.data_out(data_rec)
);
endmodule
2.ds1302.v
地址/控制字节:

第7位:固定值1;
第6位:1—使用RAM功能,0—使用时钟功能;
第5~1位:寄存器地址;
第0位:1—读,0—写;
DS1302相关寄存器:

前7个寄存器是保存时间(通过上表可看出,时间的存储方式采用BCD码)。
补充:第一个寄存器的最高位CH用来控制是否开始计数。0—正常计数;1—停止计数。默认为0。
第8个寄存器是写保护寄存器:第7位为1—打开写保护,禁止向其他寄存器写数据;为0—关闭写保护。
module ds1302(
input rst,
input clk,
output ds1302_ce,
output ds1302_sclk,
inout ds1302_io,
input write_time_req, //上层给出的写请求
output write_time_ack, //返回给上层写完成信号(年月日等所有数据)
input[7:0] write_second,
input[7:0] write_minute,
input[7:0] write_hour,
input[7:0] write_date,
input[7:0] write_month,
input[7:0] write_week,
input[7:0] write_year,
input read_time_req, //上层给出的读请求
output read_time_ack, //返回给上层读完成信号(年月日等所有数据)
output reg[7:0] read_second, //bcd码存储,高四位代表十位,低四位代表个位
output reg[7:0] read_minute,
output reg[7:0] read_hour,
output reg[7:0] read_date,
output reg[7:0] read_month,
output reg[7:0] read_week,
output reg[7:0] read_year
);
localparam S_IDLE = 0; //空闲状态
localparam S_WR_WP = 1; //写保护
localparam S_WR_SEC = 2; //写秒
localparam S_WR_MIN = 3; //写分
localparam S_WR_HOUR = 4; //写时
localparam S_WR_DATE = 5; //写日
localparam S_WR_MON = 6; //写月
localparam S_WR_WEEK = 7; //写周
localparam S_WR_YEAR = 8; //写年
localparam S_RD_SEC = 9;
localparam S_RD_MIN = 10;
localparam S_RD_HOUR = 11;
localparam S_RD_MON = 12;
localparam S_RD_WEEK = 13;
localparam S_RD_YEAR = 14;
localparam S_RD_DATE = 15;
localparam S_ACK = 16; //返回结束信号
reg[4:0] state, next_state;
reg[7:0] read_addr; //暂存读取数据的地址
reg[7:0] write_addr; //暂存写入的地址
reg[7:0] write_data; //暂存写入的数据
wire[7:0] read_data; //暂存读取的数据
reg cmd_write; //写命令信号
reg cmd_read; //读命令信号
wire cmd_read_ack; //读操作完成信号
wire cmd_write_ack; //写操作完成信号
assign write_time_ack = (state == S_ACK);
assign read_time_ack = (state == S_ACK);
//给出写命令信号
always@(posedge clk or posedge rst)
begin
if(rst)
cmd_write <= 1'b0;
else if(cmd_write_ack)
cmd_write <= 1'b0;
else
case(state)
S_WR_WP,
S_WR_SEC,
S_WR_MIN,
S_WR_HOUR,
S_WR_DATE,
S_WR_MON,
S_WR_WEEK,
S_WR_YEAR:
cmd_write <= 1'b1;
endcase
end
//给出读命令信号
always@(posedge clk or posedge rst)
begin
if(rst)
cmd_read <= 1'b0;
else if(cmd_read_ack)
cmd_read <= 1'b0;
else
case(state)
S_RD_SEC,
S_RD_MIN,
S_RD_HOUR,
S_RD_DATE,
S_RD_MON,
S_RD_WEEK,
S_RD_YEAR:
cmd_read <= 1'b1;
endcase
end
//输出读到的数据
always@(posedge clk or posedge rst)
begin
if(rst)
read_second <= 8'h00;
else if(state == S_RD_SEC && cmd_read_ack)
read_second <= read_data;
end
always@(posedge clk or posedge rst)
begin
if(rst)
read_minute <= 8'h00;
else if(state == S_RD_MIN && cmd_read_ack)
read_minute <= read_data;
end
always@(posedge clk or posedge rst)
begin
if(rst)
read_hour <= 8'h00;
else if(state == S_RD_HOUR && cmd_read_ack)
read_hour <= read_data;
end
always@(posedge clk or posedge rst)
begin
if(rst)
read_date <= 8'h00;
else if(state == S_RD_DATE && cmd_read_ack)
read_date <= read_data;
end
always@(posedge clk or posedge rst)
begin
if(rst)
read_month <= 8'h00;
else if(state == S_RD_MON && cmd_read_ack)
read_month <= read_data;
end
always@(posedge clk or posedge rst)
begin
if(rst)
read_week <= 8'h00;
else if(state == S_RD_WEEK && cmd_read_ack)
read_week <= read_data;
end
always@(posedge clk or posedge rst)
begin
if(rst)
read_year <= 8'h00;
else if(state == S_RD_YEAR && cmd_read_ack)
read_year <= read_data;
end
//控制当前要读数据的地址
always@(posedge clk or posedge rst)
begin
if(rst)
read_addr <= 8'h00;
else
case(state)
S_RD_SEC:
read_addr <= 8'h81;
S_RD_MIN:
read_addr <= 8'h83;
S_RD_HOUR:
read_addr <= 8'h85;
S_RD_DATE:
read_addr <= 8'h87;
S_RD_MON:
read_addr <= 8'h89;
S_RD_WEEK:
read_addr <= 8'h8b;
S_RD_YEAR:
read_addr <= 8'h8d;
default:
read_addr <= read_addr;
endcase
end
//控制当前要写数据的地址和数据
always@(posedge clk or posedge rst)
begin
if(rst)
begin
write_addr <= 8'h00;
write_data <= 8'h00;
end
else
case(state)
S_WR_WP: //打开写保护
begin
write_addr <= 8'h8e;
write_data <= 8'h00;
end
S_WR_SEC:
begin
write_addr <= 8'h80;
write_data <= write_second;
end
S_WR_MIN:
begin
write_addr <= 8'h82;
write_data <= write_minute;
end
S_WR_HOUR:
begin
write_addr <= 8'h84;
write_data <= write_hour;
end
S_WR_DATE:
begin
write_addr <= 8'h86;
write_data <= write_date;
end
S_WR_MON:
begin
write_addr <= 8'h88;
write_data <= write_month;
end
S_WR_WEEK:
begin
write_addr <= 8'h8a;
write_data <= write_week;
end
S_WR_YEAR:
begin
write_addr <= 8'h8c;
write_data <= write_year;
end
default:
begin
write_addr <= 8'h00;
write_data <= 8'h00;
end
endcase
end
//读写状态机
always@(posedge clk or posedge rst)
begin
if(rst)
state <= S_IDLE;
else
state <= next_state;
end
always@(*)
begin
case(state)
S_IDLE:
if(write_time_req)
next_state <= S_WR_WP;
else if(read_time_req)
next_state <= S_RD_SEC;
else
next_state <= S_IDLE;
S_WR_WP:
if(cmd_write_ack)
next_state <= S_WR_SEC;
else
next_state <= S_WR_WP;
S_WR_SEC:
if(cmd_write_ack)
next_state <= S_WR_MIN;
else
next_state <= S_WR_SEC;
S_WR_MIN:
if(cmd_write_ack)
next_state <= S_WR_HOUR;
else
next_state <= S_WR_MIN;
S_WR_HOUR:
if(cmd_write_ack)
next_state <= S_WR_DATE;
else
next_state <= S_WR_HOUR;
S_WR_DATE:
if(cmd_write_ack)
next_state <= S_WR_MON;
else
next_state <= S_WR_DATE;
S_WR_MON:
if(cmd_write_ack)
next_state <= S_WR_WEEK;
else
next_state <= S_WR_MON;
S_WR_WEEK:
if(cmd_write_ack)
next_state <= S_WR_YEAR;
else
next_state <= S_WR_WEEK;
S_WR_YEAR:
if(cmd_write_ack)
next_state <= S_ACK;
else
next_state <= S_WR_YEAR;
S_RD_SEC:
if(cmd_read_ack)
next_state <= S_RD_MIN;
else
next_state <= S_RD_SEC;
S_RD_MIN:
if(cmd_read_ack)
next_state <= S_RD_HOUR;
else
next_state <= S_RD_MIN;
S_RD_HOUR:
if(cmd_read_ack)
next_state <= S_RD_DATE;
else
next_state <= S_RD_HOUR;
S_RD_DATE:
if(cmd_read_ack)
next_state <= S_RD_MON;
else
next_state <= S_RD_DATE;
S_RD_MON:
if(cmd_read_ack)
next_state <= S_RD_WEEK;
else
next_state <= S_RD_MON;
S_RD_WEEK:
if(cmd_read_ack)
next_state <= S_RD_YEAR;
else
next_state <= S_RD_WEEK;
S_RD_YEAR:
if(cmd_read_ack)
next_state <= S_ACK;
else
next_state <= S_RD_YEAR;
S_ACK:
next_state <= S_IDLE;
default:
next_state <= S_IDLE;
endcase
end
//实例化ds1302读写数据流模块
ds1302_io ds1302_io_m0(
.clk(clk),
.rst(rst),
.ds1302_ce(ds1302_ce),
.ds1302_sclk(ds1302_sclk),
.ds1302_io(ds1302_io),
.cmd_read(cmd_read),
.cmd_write(cmd_write),
.cmd_read_ack(cmd_read_ack),
.cmd_write_ack(cmd_write_ack),
.read_addr(read_addr),
.write_addr(write_addr),
.read_data(read_data),
.write_data(write_data)
);
endmodule
3.ds1302_test.v
ds1302的测试模块,后续的使用只需更改此模块即可,上面的三个模块均可直接调用。
同时可以看到对于ds1302的读写采用了模块的层层嵌套。
module ds1302_test(
input rst,
input clk,
//ds1302的三根线
output ds1302_ce,
output ds1302_sclk,
inout ds1302_io,
//从ds1302读出的数据
output[7:0] read_second,
output[7:0] read_minute,
output[7:0] read_hour,
output[7:0] read_date,
output[7:0] read_month,
output[7:0] read_week,
output[7:0] read_year
);
localparam S_IDLE = 0;
localparam S_READ = 1;
localparam S_WRITE = 2;
localparam S_READ_CH = 3;
localparam S_WRITE_CH = 4;
localparam S_WAIT = 5;
reg[2:0] state,next_state;
reg write_time_req; //写请求
wire write_time_ack; //写结束
reg read_time_req; //读请求
wire read_time_ack; //读结束
//写数据寄存器
reg[7:0] write_second_reg;
reg[7:0] write_minute_reg;
reg[7:0] write_hour_reg;
reg[7:0] write_date_reg;
reg[7:0] write_month_reg;
reg[7:0] write_week_reg;
reg[7:0] write_year_reg;
wire CH; //ds1302计数使能位
//wire[7:0] read_second;
//wire[7:0] read_minute;
//wire[7:0] read_hour;
//wire[7:0] read_date;
//wire[7:0] read_month;
//wire[7:0] read_week;
//wire[7:0] read_year;
assign CH = read_second[7]; //得到计数使能CH位的值
//标记写请求
always@(posedge clk)
begin
if(write_time_ack)
write_time_req <= 1'b0;
else if(state == S_WRITE_CH)
write_time_req <= 1'b1;
end
//标记读请求
always@(posedge clk)
begin
if(read_time_ack)
read_time_req <= 1'b0;
else if(state == S_READ || state == S_READ_CH)
read_time_req <= 1'b1;
end
//状态机
always@(posedge clk or posedge rst)
begin
if(rst)
state <= S_IDLE;
else
state <= next_state;
end
always@(posedge clk or posedge rst)
begin
if(rst)
begin
write_second_reg <= 8'h00;
write_minute_reg <= 8'h00;
write_hour_reg <= 8'h00;
write_date_reg <= 8'h00;
write_month_reg <= 8'h00;
write_week_reg <= 8'h00;
write_year_reg <= 8'h00;
end
else if(state == S_WRITE_CH) //如果计数未打开,则写入数据并打开计数
begin
// write_second_reg <= read_second; //更换此块代码可以使ds1302从上一次的时间继续计数
// write_minute_reg <= read_minute;
// write_hour_reg <= read_hour;
// write_date_reg <= read_date;
// write_month_reg <= read_month;
// write_week_reg <= read_week;
// write_year_reg <= read_year;
write_second_reg <= 8'h01;
write_minute_reg <= 8'h10;
write_hour_reg <= 8'h13;
write_date_reg <= 8'h13;
write_month_reg <= 8'h12;
write_week_reg <= 8'h02;
write_year_reg <= 8'h16;//2016-12-13 13:10:01
end
end
always@(*)
begin
case(state)
S_IDLE:
next_state <= S_READ_CH;
S_READ_CH: //判断CH位的值,计数是否打开,0—打开,1—关闭
if(read_time_ack)
next_state <= CH ? S_WRITE_CH : S_READ;
else
next_state <= S_READ_CH;
S_WRITE_CH: //如果计数未打开
if(write_time_ack)
next_state <= S_WAIT;
else
next_state <= S_WRITE_CH;
S_WAIT:
next_state <= S_READ;
S_READ: //读数据
if(read_time_ack)
next_state <= S_IDLE;
else
next_state <= S_READ;
default:
next_state <= S_IDLE;
endcase
end
ds1302 ds1302_m0(
.rst(rst),
.clk(clk),
.ds1302_ce(ds1302_ce),
.ds1302_sclk(ds1302_sclk),
.ds1302_io(ds1302_io),
.write_time_req(write_time_req),
.write_time_ack(write_time_ack),
.write_second(write_second_reg),
.write_minute(write_minute_reg),
.write_hour(write_hour_reg),
.write_date(write_date_reg),
.write_month(write_month_reg),
.write_week(write_week_reg),
.write_year(write_year_reg),
.read_time_req(read_time_req),
.read_time_ack(read_time_ack),
.read_second(read_second),
.read_minute(read_minute),
.read_hour(read_hour),
.read_date(read_date),
.read_month(read_month),
.read_week(read_week),
.read_year(read_year)
);
endmodule
四.数码管模块
数码管结构图:
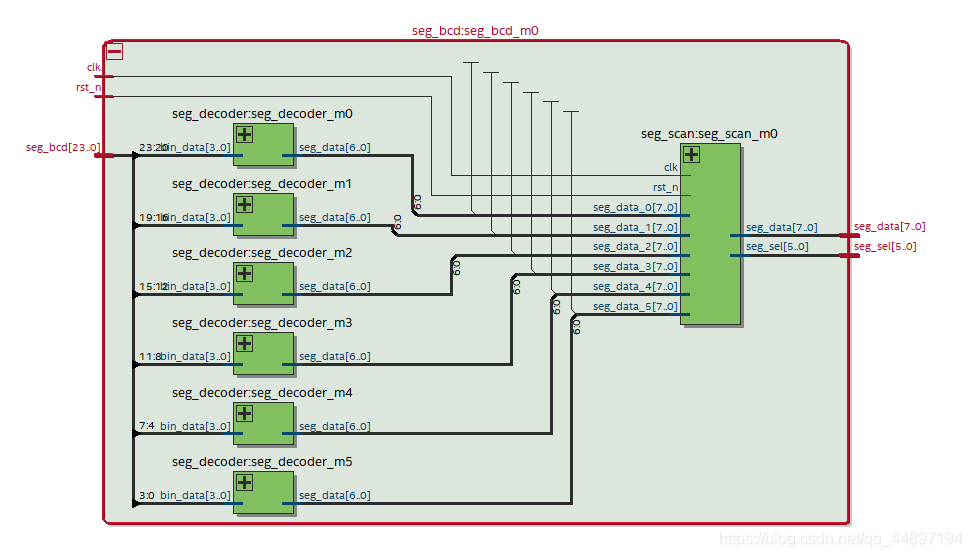
seg_bcd.v
数码管的顶层模块。解码器模块和动态扫描此处不再列出(第六节下篇有相关代码)
module seg_bcd(
input clk,
input rst_n,
output[5:0] seg_sel, //数码管位选
output[7:0] seg_data, //数码管段选
input [23:0] seg_bcd //需要显示的数据
);
//实例化解码器模块。对数据解码,转换成数码管段选。每四位一个数据。(bcd码)
wire[6:0] seg7_data_0;
seg_decoder seg_decoder_m0(
.bin_data(seg_bcd[23:20]),
.seg_data(seg7_data_0)
);
wire[6:0] seg7_data_1;
seg_decoder seg_decoder_m1(
.bin_data(seg_bcd[19:16]),
.seg_data(seg7_data_1)
);
wire[6:0] seg7_data_2;
seg_decoder seg_decoder_m2(
.bin_data(seg_bcd[15:12]),
.seg_data(seg7_data_2)
);
wire[6:0] seg7_data_3;
seg_decoder seg_decoder_m3(
.bin_data(seg_bcd[11:8]),
.seg_data(seg7_data_3)
);
wire[6:0] seg7_data_4;
seg_decoder seg_decoder_m4(
.bin_data(seg_bcd[7:4]),
.seg_data(seg7_data_4)
);
wire[6:0] seg7_data_5;
seg_decoder seg_decoder_m5(
.bin_data(seg_bcd[3:0]),
.seg_data(seg7_data_5)
);
wire[7:0] seg_data_0;
wire[7:0] seg_data_1;
wire[7:0] seg_data_2;
wire[7:0] seg_data_3;
wire[7:0] seg_data_4;
wire[7:0] seg_data_5;
assign seg_data_0 = {1'b1,seg7_data_0}; //最高位为小数点,共阳极数码管,高电平熄灭
assign seg_data_1 = {1'b1,seg7_data_1};
assign seg_data_2 = {1'b1,seg7_data_2};
assign seg_data_3 = {1'b1,seg7_data_3};
assign seg_data_4 = {1'b1,seg7_data_4};
assign seg_data_5 = {1'b1,seg7_data_5};
//实例化动态扫描模块
seg_scan seg_scan_m0(
.clk(clk),
.rst_n(rst_n),
.seg_sel(seg_sel),
.seg_data(seg_data),
.seg_data_0(seg_data_0),
.seg_data_1(seg_data_1),
.seg_data_2(seg_data_2),
.seg_data_3(seg_data_3),
.seg_data_4(seg_data_4),
.seg_data_5(seg_data_5)
);
endmodule
五.主模块
整体结构图:
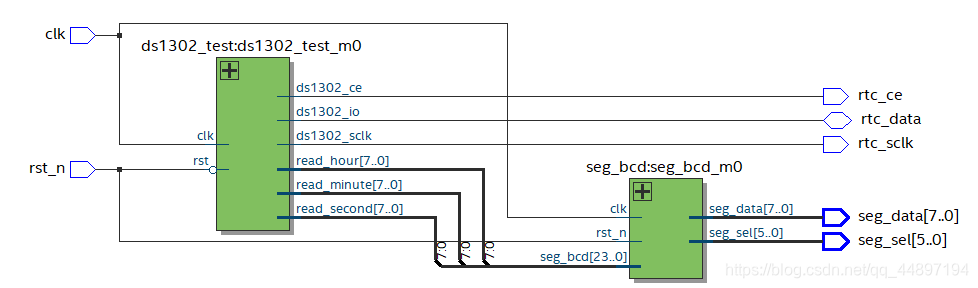
top.v
module top(
input clk, //系统时钟
input rst_n, //复位按键
output rtc_sclk, //ds1302时钟线
output rtc_ce, //ds1302片选线
inout rtc_data, //ds1302数据线
output [5:0] seg_sel, //数码管位选
output [7:0] seg_data //数码管段选
);
wire[7:0] read_second;
wire[7:0] read_minute;
wire[7:0] read_hour;
wire[7:0] read_date;
wire[7:0] read_month;
wire[7:0] read_week;
wire[7:0] read_year;
//数码管动态扫描实例化
seg_bcd seg_bcd_m0(
.clk (clk),
.rst_n (rst_n),
.seg_sel (seg_sel),
.seg_data (seg_data),
.seg_bcd ({read_hour,read_minute,read_second}) //显示时分秒
);
//ds1302模块实例化
ds1302_test ds1302_test_m0(
.rst (~rst_n),
.clk (clk),
.ds1302_ce (rtc_ce),
.ds1302_sclk (rtc_sclk),
.ds1302_io (rtc_data),
.read_second (read_second),
.read_minute (read_minute),
.read_hour (read_hour),
.read_date (read_date),
.read_month (read_month),
.read_week (read_week),
.read_year (read_year)
);
endmodule



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











