










 本文介绍了如何在YOLOV8基础上结合双目测距技术,实现在指定区域对人和车辆进行多类别的计数,并展示了计数模块和判断模块的代码示例。实验结果显示了在视频流中实时计数的效果。
本文介绍了如何在YOLOV8基础上结合双目测距技术,实现在指定区域对人和车辆进行多类别的计数,并展示了计数模块和判断模块的代码示例。实验结果显示了在视频流中实时计数的效果。
1. 双目测距基础
本项目是在YOLOV8 + 双目测距的基础上实现的,测距原理可见上边文章
2. 计数功能
2.1 计数模块
在指定区域内计数模块
region_points = [(20, 20), (20, 600), (1200, 600), (1200, 20)]
count_class1 = 0
count_class2 = 0
for i, box in enumerate(boxes):
x1, y1, x2, y2 = box[:4]
x_center = (x1 + x2) / 2
y_center = (y1 + y2) / 2
center_point = (int(x_center), int(y_center))
if is_inside_region(center_point, region_points):
if box[-1] == 0: # 类别1的标签.人
count_class1 += 1
elif box[-1] == 2: # 类别2的标签,车
count_class2 += 1
2.2 判断模块
def is_inside_region(point, region_points):
"""
判断点是否在指定区域内
"""
return cv2.pointPolygonTest(np.array(region_points), point, False) >= 0
3. 初始代码
import time
import cv2
import numpy as np
from ultralytics import YOLO
from stereo import stereoconfig_040_2
from stereo.stereo import stereo_40
from stereo.stereo import stereo_threading, MyThread
from stereo.dianyuntu_yolo import preprocess, undistortion, getRectifyTransform, draw_line, rectifyImage, \
stereoMatchSGBM
def is_inside_region(point, region_points):
"""
判断点是否在指定区域内
"""
return cv2.pointPolygonTest(np.array(region_points), point, False) >= 0
def count_objects_in_region(boxes, region_points):
"""
在指定区域内计数物体
"""
count = 0
for box in boxes:
x_center, y_center, width, height = box
center_point = (int(x_center), int(y_center))
if is_inside_region(center_point, region_points):
count += 1
return count
def detect():
model = YOLO("yolov8n.pt")
cv2.namedWindow('region couter', cv2.WINDOW_NORMAL)
cv2.resizeWindow('region couter', 1280, 360) # 设置宽高
cap = cv2.VideoCapture('ultralytics/assets/a3.mp4')
out_video = cv2.VideoWriter('output.avi', cv2.VideoWriter_fourcc(*'XVID'), 30, (2560, 720))
region_points = [(20, 20), (20, 600), (1200, 600), (1200, 20)]
region_points_np = np.array(region_points)
assert cap.isOpened(), "Error reading video file"
while cap.isOpened():
success, im0 = cap.read()
if not success:
print("Video frame is empty or video processing has been successfully completed.")
break
config = stereoconfig_040_2.stereoCamera()
map1x, map1y, map2x, map2y, Q = getRectifyTransform(720, 1280, config)
thread = MyThread(stereo_threading, args=(config, im0, map1x, map1y, map2x, map2y, Q))
thread.start()
tracks = model.track(im0, persist=True)
annotated_frame = tracks[0].plot()
boxes = tracks[0].boxes.data
count_class1 = 0
count_class2 = 0
for i, box in enumerate(boxes):
x1, y1, x2, y2 = box[:4]
x_center = (x1 + x2) / 2
y_center = (y1 + y2) / 2
center_point = (int(x_center), int(y_center))
if is_inside_region(center_point, region_points):
if box[-1] == 0: # 类别1的标签.人
count_class1 += 1
elif box[-1] == 2: # 类别2的标签,车
count_class2 += 1
if (0 < x2 < 1280):
thread.join()
points_3d = thread.get_result()
a = points_3d[int(y_center), int(x_center), 0] / 1000
b = points_3d[int(y_center), int(x_center), 1] / 1000
c = points_3d[int(y_center), int(x_center), 2] / 1000
distance = ((a ** 2 + b ** 2 + c ** 2) ** 0.5)
if (distance != 0):
text_dis_avg = "dis:%0.2fm" % distance
cv2.putText(annotated_frame, text_dis_avg, (int(x2 + 5), int(y1 + 30)), cv2.FONT_ITALIC, 1.0,
(0, 255, 255), 2)
cv2.polylines(annotated_frame, [region_points_np], isClosed=True, color=(255, 0, 0), thickness=2)
print("Number of objects in class 1:", count_class1)
print("Number of objects in class 2:", count_class2)
cv2.imshow("region couter", annotated_frame)
out_video.write(annotated_frame)
if cv2.waitKey(1) == ord('q'):
break
out_video.release()
cap.release()
cv2.destroyAllWindows()
if __name__ == '__main__':
detect()
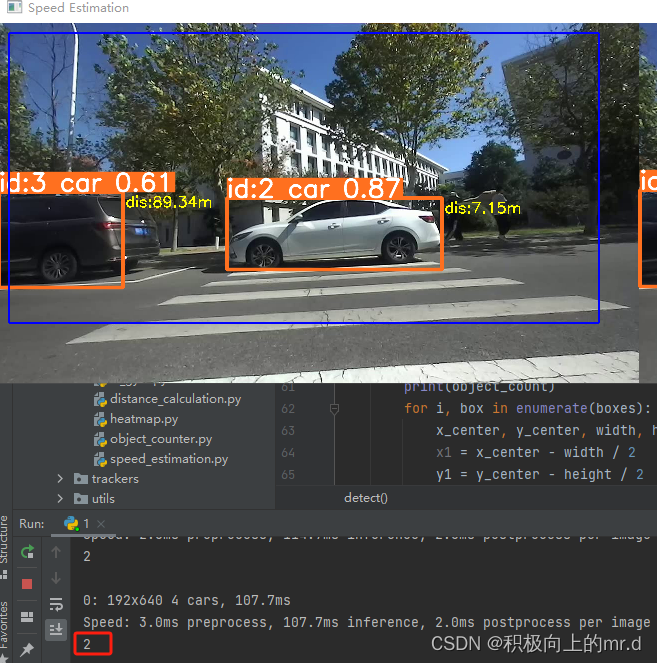
4. 实验结果
本实验可以实现区域多类别计数
(1)区域计数实验
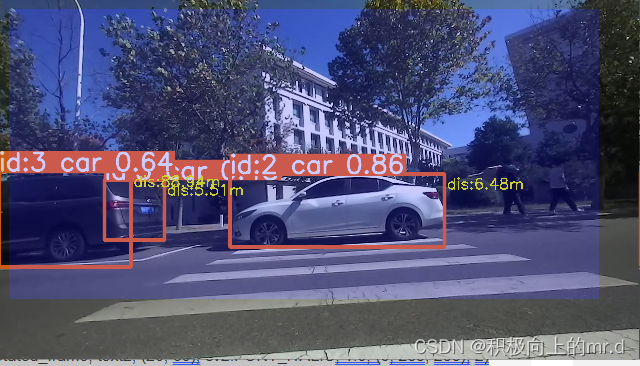
(2)如需把区域背景换成填充色,可将上边代码里的
cv2.polylines(annotated_frame, [region_points_np], isClosed=True, color=(255, 0, 0), thickness=2)
替换为
region_mask = np.zeros_like(annotated_frame)
cv2.fillPoly(region_mask, [region_points_np], color=(255, 0, 0))
# 使用透明度将填充后的区域与原始帧混合
alpha = 0.2 # 调整透明度
annotated_frame = cv2.addWeighted(annotated_frame, 1 - alpha, region_mask, alpha, 0)
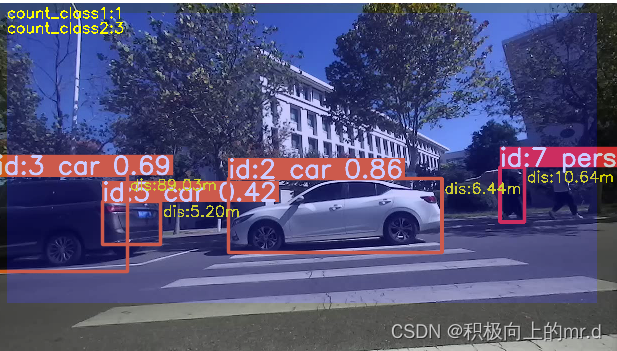
(3)计数在图上显示
在annotated_frame = cv2.addWeighted(annotated_frame, 1 - alpha, region_mask, alpha, 0)添加
text1 = "count_class1:%d" % count_class1
text2 = "count_class2:%d" % count_class2
cv2.putText(annotated_frame, text1, (20, 30), cv2.FONT_ITALIC, 1.0, (0, 255, 255), 2)
cv2.putText(annotated_frame, text2, (20, 60), cv2.FONT_ITALIC, 1.0, (0, 255, 255), 2)
5. 完整代码
import time
import cv2
import numpy as np
from ultralytics import YOLO
from stereo import stereoconfig_040_2
from stereo.stereo import stereo_40
from stereo.stereo import stereo_threading, MyThread
from stereo.dianyuntu_yolo import preprocess, undistortion, getRectifyTransform, draw_line, rectifyImage, \
stereoMatchSGBM
def is_inside_region(point, region_points):
"""
判断点是否在指定区域内
"""
return cv2.pointPolygonTest(np.array(region_points), point, False) >= 0
def count_objects_in_region(boxes, region_points):
"""
在指定区域内计数物体
"""
count = 0
for box in boxes:
x_center, y_center, width, height = box
center_point = (int(x_center), int(y_center))
if is_inside_region(center_point, region_points):
count += 1
return count
def detect():
model = YOLO("yolov8n.pt")
cv2.namedWindow('region couter', cv2.WINDOW_NORMAL)
cv2.resizeWindow('region couter', 1280, 360) # 设置宽高
cap = cv2.VideoCapture('ultralytics/assets/a3.mp4')
out_video = cv2.VideoWriter('output.avi', cv2.VideoWriter_fourcc(*'XVID'), 30, (2560, 720))
region_points = [(20, 20), (20, 600), (1200, 600), (1200, 20)]
region_points_np = np.array(region_points)
assert cap.isOpened(), "Error reading video file"
while cap.isOpened():
success, im0 = cap.read()
if not success:
print("Video frame is empty or video processing has been successfully completed.")
break
config = stereoconfig_040_2.stereoCamera()
map1x, map1y, map2x, map2y, Q = getRectifyTransform(720, 1280, config)
thread = MyThread(stereo_threading, args=(config, im0, map1x, map1y, map2x, map2y, Q))
thread.start()
tracks = model.track(im0, persist=True)
annotated_frame = tracks[0].plot()
boxes = tracks[0].boxes.data
count_class1 = 0
count_class2 = 0
for i, box in enumerate(boxes):
x1, y1, x2, y2 = box[:4]
x_center = (x1 + x2) / 2
y_center = (y1 + y2) / 2
center_point = (int(x_center), int(y_center))
if is_inside_region(center_point, region_points):
if box[-1] == 0: # 类别1的标签.人
count_class1 += 1
elif box[-1] == 2: # 类别2的标签,车
count_class2 += 1
if (0 < x2 < 1280):
thread.join()
points_3d = thread.get_result()
a = points_3d[int(y_center), int(x_center), 0] / 1000
b = points_3d[int(y_center), int(x_center), 1] / 1000
c = points_3d[int(y_center), int(x_center), 2] / 1000
distance = ((a ** 2 + b ** 2 + c ** 2) ** 0.5)
if (distance != 0):
text_dis_avg = "dis:%0.2fm" % distance
cv2.putText(annotated_frame, text_dis_avg, (int(x2 + 5), int(y1 + 30)), cv2.FONT_ITALIC, 1.0,
(0, 255, 255), 2)
# cv2.polylines(annotated_frame, [region_points_np], isClosed=True, color=(255, 0, 0), thickness=2)
region_mask = np.zeros_like(annotated_frame)
cv2.fillPoly(region_mask, [region_points_np], color=(255, 0, 0))
# 使用透明度将填充后的区域与原始帧混合
alpha = 0.2 # 调整透明度
annotated_frame = cv2.addWeighted(annotated_frame, 1 - alpha, region_mask, alpha, 0)
text1 = "count_class1:%d" % count_class1
text2 = "count_class2:%d" % count_class2
cv2.putText(annotated_frame, text1, (20, 30), cv2.FONT_ITALIC, 1.0, (0, 255, 255), 2)
cv2.putText(annotated_frame, text2, (20, 60), cv2.FONT_ITALIC, 1.0, (0, 255, 255), 2)
print("Number of objects in class 1:", count_class1)
print("Number of objects in class 2:", count_class2)
cv2.imshow("region couter", annotated_frame)
out_video.write(annotated_frame)
if cv2.waitKey(1) == ord('q'):
break
out_video.release()
cap.release()
cv2.destroyAllWindows()
if __name__ == '__main__':
detect()
6. 源码
可以去 YOLOV8 + 双目测距 下载源码,然后把上边主代码贴进去运行即可

















 2292
2292

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











