






在这个项目中,将构建简单的有限状态机 (FSM)。 有限状态机是系统的数学抽象,它可以在给定时间恰好处于有限状态之一,并且可以使用适当的输入信号将状态从一个状态更改为另一个状态(状态转换)。 状态是对系统状态的描述,该系统正在等待某个触发器来执行从一个状态到另一个状态的转换。
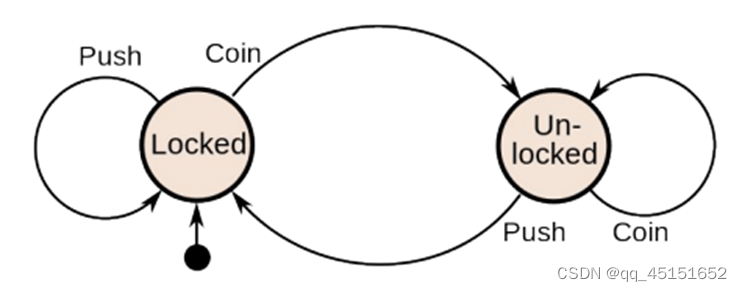
FSM 可以使用“状态图”来描述——这是一个有向图,其中包含状态以及这些状态之间的转换。 具有两个状态的 FSM 最简单的例子之一是十字转门。 在旋转门的输入槽中投入硬币可解锁臂(状态“解锁”)。 顾客通过后,手臂被锁定,直到插入另一枚硬币(状态“锁定”)。
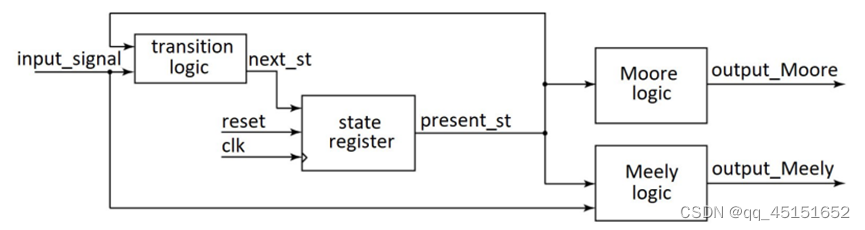
有两种流行的 FSM 实现:Moore FSM(输出仅取决于当前状态)和 Mealy FSM(输出取决于当前状态和输入信号)。 典型 FSM 的流程图如图 2 所示。它由转换逻辑、状态寄存器(更新当前状态)和解码逻辑组成。
在我们的项目中,将描述简单的 Moore FSM。 设计的 FSM 的状态图如图 3 所示。应该注意的是,我们将为未声明的状态、转换或输入信号添加额外的 ERR_STATE(参见下面的 Verilog 代码)。 只采用逻辑综合,没有映射和拟合到 FPGA 中。

FSM.v
`timescale 1ns / 1ps
module FSM(clk,reset,abc,state_out);
input wire clk,reset;
input wire [2:0] abc;
output reg [3:0] state_out;
localparam STATE_1 = 2’d1;
localparam STATE_2 = 2’d2;
localparam STATE_3 = 2’d3;
localparam ERR_STATE = 2’d0;
reg [1:0] present_state;
reg [1:0] next_state;
always @()
begin
case(present_state)
STATE_1:
begin
case(abc)
(3’b100): next_state = STATE_1;
(3’b010): next_state = STATE_2;
(3’b001): next_state = STATE_3;
//default: next_state = ERR_STATE;
endcase
end
STATE_2:
begin
case(abc)
(3’b010): next_state = STATE_2;
(3’b100): next_state = STATE_1;
(3’b001): next_state = STATE_3;
//default: next_state = ERR_STATE;
endcase
end
STATE_3:
begin
case(abc)
(3’b001): next_state = STATE_3;
(3’b010): next_state = STATE_2;
(3’b100): next_state = STATE_1;
//default: next_state = ERR_STATE;
endcase
end
ERR_STATE:
begin
case(abc)
(3’b001): next_state = STATE_3;
(3’b010): next_state = STATE_2;
(3’b100): next_state = STATE_1;
//default: next_state = ERR_STATE;
endcase
end
//default:
//next_state = ERR_STATE;
endcase
end
//state register
always @(posedge clk)
if (reset)
present_state <= ERR_STATE;
else
present_state <= next_state;
//output state decoder
always @()
begin
case(present_state)
STATE_1: state_out = 4’d1;
STATE_2: state_out = 4’d2;
STATE_3: state_out = 4’d3;
//ERR_STATE: state_out = 4’d14;
default: state_out = 4’d14;
endcase
end
endmodule
FSM_TB.v
`timescale 1ns / 1ps
module FSM_TB;
// Inputs
reg clk;
reg reset;
reg [2:0] abc;
// Outputs
wire [3:0] state_out;
// Instantiate the Unit Under Test (UUT)
FSM uut (
.clk(clk),
.reset(reset),
.abc(abc),
.state_out(state_out)
);
initial
begin
// Initialize Inputs
clk = 0;
reset = 1;
abc = 0;
// Wait 2 ns for global reset to finish
#20;
reset = 0;
//terminate simulation after 100ns
#100 $finish;
end
//Add stimulus here
initial forever
#1 clk = ~clk;
always @(posedge clk)
begin
abc <= abc +3’d1;
$display("time = %d,reset = %b,abc = %b,state_out = %d,",$time,reset,abc,state_out);
end
endmodule
然后看RTL,Technology Schematic图,以及Simulation里的simulate Behavioral Model。
问题:
1、为什么用localparam语句而不是parameter语句? 我们如何使用单热状态编码在 Verilog 中描述这个 FSM?
2. 尝试注释“ERR_STATE”case 语句并模拟设计。 为什么我们会得到这些结果? 请画出获得的 FSM 的状态图。














 7918
7918











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









