







第2节:基于灰度值的特征&相关算子
1、区域的灰度特征值
| Image图像 / Features特征 用于计算指定区域的灰度特征值。 gray_features(Regions, Image : : Features : Value) Regions:输入参数,输入被计算的区域。 Image:输入参数,表示灰度值图像。 Features:输入参数,表示输入的特征的名称。 【 'alpha'接近水平的alpha参数, 'anisotropy'各向异性(或非均向性), 'area'区域内的灰度值总和,黑色0 白色255, 'beta'接近水平的beta参数, 'row'重心行坐标, 'column'重心列坐标, 'deviation'灰度偏离【像素越杂&灰度值差异越大,则Value的值越高】, 'entropy'平均信息量, 'fuzzy_entropy'区域的模糊平均信息量, 'fuzzy_perimeter'模糊区域的边沿周长, 'min'最小灰度值, 'max'最大灰度值, 'mean'平均灰度值, 'median'中值灰度(就是将图像中所有像素按照灰度大小排列,取这些数值里排在中间位置的那个值), 'moments_row'混合矩阵的行, 'moments_column'混合矩阵的列, 'phi'椭圆的方位角度, 'plane_deviation'近似平面的偏离, 'ra'椭圆的长轴半径, 'rb'椭圆的短轴半径 】 Value:输出参数,输出的特征的值 |
2、区域的最大和最小灰度值
| Image图像 / Features特征 计算区域内的最大与最小灰度值。 min_max_gray(Regions, Image : : Percent : Min, Max, Range) Regions:输入参数,输入被计算的区域。 Image:输入参数,输入的灰度图像。 Percent:输入参数,表示低于最大灰度值的百分比(即取直方图波峰与谷底指尖的区域,向内收缩此百分比,然后再进行下列计算)。 Min:输出参数,表示最小的灰度值。 Max:输出参数,表示最大的灰度值,【Max≥Min】。 Range:输出参数,表示最Min和ax之间的区间范围大小(Max-Min)。 |
3、灰度的平均值和偏差
| Image图像 / Features特征 计算单张图像上多个区域的灰度值的平均值和偏差。 intensity(Regions, Image : : : Mean, Deviation) Regions:输入参数,输入被计算的区域。 Image:输入参数,表示输入的灰度图像。 Mean:输出参数,表示输出的单个区域的平均灰度。 Deviation:输出参数,表示输出该区域的灰度值差别(灰度值的均匀程度)。 |
4、灰度区域的面积和中心
| Image图像 / Features特征 计算一个灰度值图像的区域面积和重心。 (图像的灰度值可以理解为像素"高度",面积可以理解为像素“体积”,在求重心,每个像素的灰度值可以理解为像素点的"质量") area_center_gray(Regions, Image : : : Area, Row, Column) Regions:输入参数,表示要计算的区域(数组)。 Image:输入参数,表示灰度值图像。 Area:输出参数,表示区域的总灰度值。 Row:输出参数,表示灰度值重心的行坐标。 Column:输出参数,表示灰度值重心的列坐标。 |
5、根据灰度特征值选择区域
| Image图像 / Features特征 选择基于灰度值特征的区域。 select_gray(Regions, Image : SelectedRegions : Features, Operation, Min, Max : ) Regions:输入参数,输入要计算的区域。 Image:输入参数,输入灰度值图像。 SelectedRegions:输出参数,表示对应灰度值特征的区域。 Features:输入参数,表示选择的特征。 【 'alpha'接近水平的alpha参数, 'anisotropy'各向异性(或非均向性), 'area'区域内的灰度值总和,黑色0 白色255, 'beta'接近水平的beta参数, 'row'重心行坐标, 'column'重心列坐标, 'deviation'灰度偏离, 'entropy'平均信息量, 'fuzzy_entropy'区域的模糊平均信息量, 'fuzzy_perimeter'模糊区域的边沿周长, 'min'最小灰度值, 'max'最大灰度值, 'mean'平均灰度值, 'median'中值灰度(就是将图像中所有像素按照灰度大小排列,取这些数值里排在中间位置的那个值), 'moments_row'混合矩阵的行, 'moments_column'混合矩阵的列, 'phi'椭圆的方位角度, 'plane_deviation'近似平面的偏离, 'ra'椭圆的长轴半径, 'rb'椭圆的短轴半径 】 Operation:输入参数,表示特征的逻辑链接,【 'and', 'or'】。 Min:输入参数,特征值的下限,即最小的灰度值。 Max:输入参数,特征值的上限,即最大的灰度值。 |
*读取输入图像
read_image (Image, 'data/village')
*将图像转化为灰度图像
rgb1_to_gray (Image, GrayImage)
*使用均值滤波对灰度图像进行平滑,以去除细节杂点
median_image (GrayImage, ImageMedian, 'circle', 2, 'mirrored')
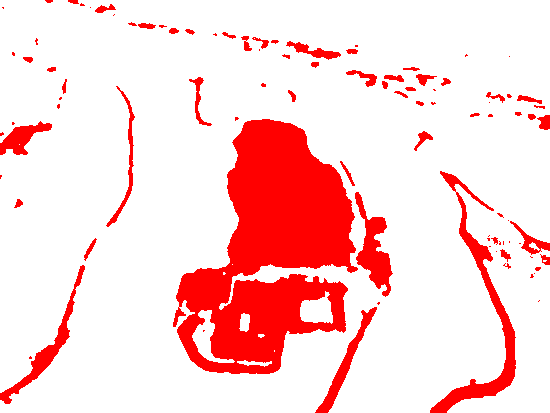
*进行阈值处理,提取出较亮部分
threshold (ImageMedian, BrightRegion, 180, 255)
*使用开运算使各区域分离
opening_circle (BrightRegion, RegionClosing, 6.5)
*将不相连通的区域分割开来
connection (RegionClosing, Snowcity)
*将面积较大的区域提取出来
select_shape (Snowcity, SelectedRegions1, 'area', 'and', 5000, 99999)
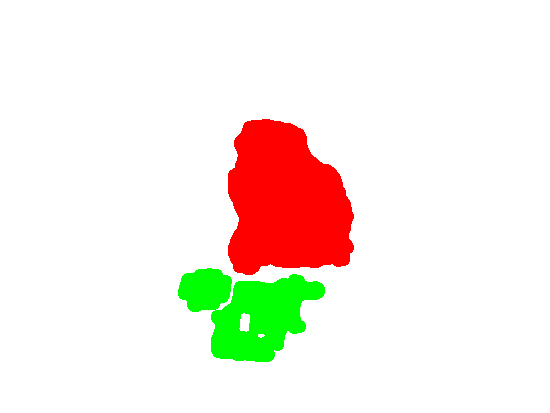
*获取这些区域的均值和偏差。由于湖面区域灰度值比较平滑,灰度偏差会比较小
intensity (SelectedRegions1, ImageMedian, Mean, Deviation)
*以灰度偏差为条件,选出符合条件的区域
select_gray (SelectedRegions1, ImageMedian, SelectedRegions, 'deviation', 'and', 4, 10)
dev_clear_window ()
dev_display (GrayImage)
dev_display (SelectedRegions)



参考文献:
杨青—《Halcon机器视觉算法原理与编程实战》















 4305
4305











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









