







1.开发环境
ESP-12F、Arduino、INA226传感器检测电压
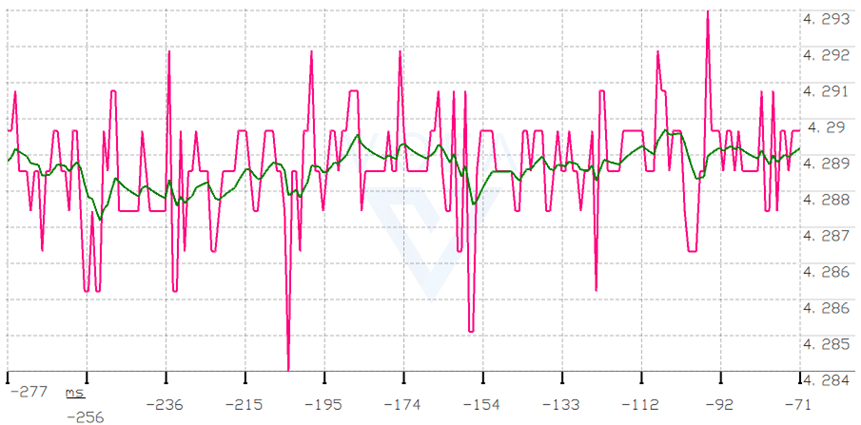
2.滑动均值滤波
// 滑动均值滤波
float slideFilter(const float Z)
{
static const int N = 8;
static float filterBuff[N];
static int num = 0;
static float sum = 0.0;
if (num < N)
{
filterBuff[num] = Z;
sum += filterBuff[num];
num++;
return sum / num;
}
else
{
sum -= sum / N;
sum += Z;
return sum / N;
}
}
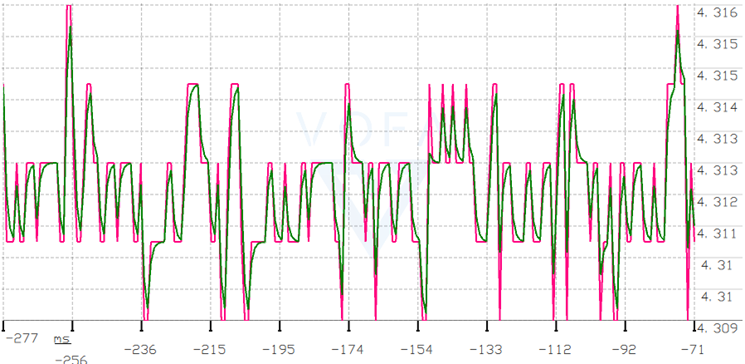
3.一阶互补滤波
// 一阶互补滤波
float firstOrderFilter(const float Z)
{
static const float alpha = 0.7;
static float prevData = Z;
float filterValue = Z * alpha + (1 - alpha) * prevData;
prevData = filterValue;
return filterValue;
}
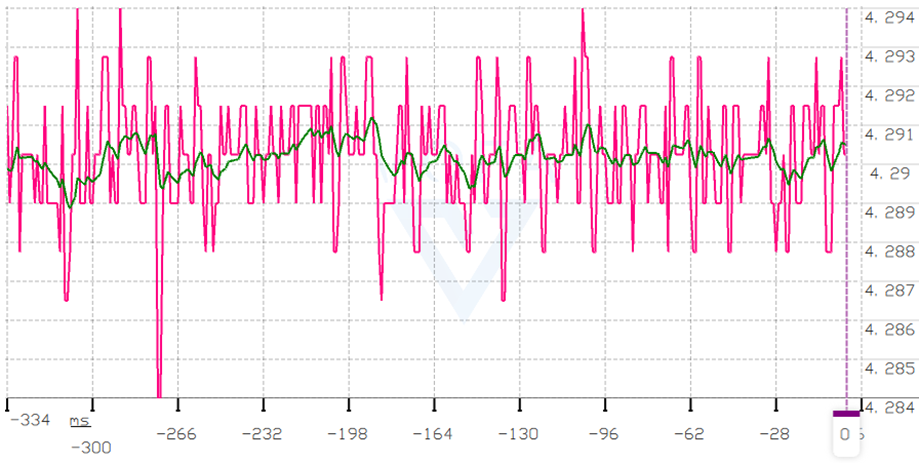
4.卡尔曼滤波
// 卡尔曼滤波
float kalmanFilter(float Z)
{
static float K = 0; // 卡尔曼增益
static float P = 1; // 估计误差协方差
static const float Q = 0.0025; // 过程噪声协方差,值增大,动态响应变快,收敛稳定性变差, Q控制误差,R控制响应速度
static const float R = 0.2; // 测量噪声协方差,传感器产生的噪声,值增大,动态响应变慢,收敛稳定性变好
static float prevData = 0;
P = P + Q;
K = P / (P + R);
Z = prevData + K * (Z - prevData);
P = (1.0 - K) * P;
prevData = Z;
return Z;
}
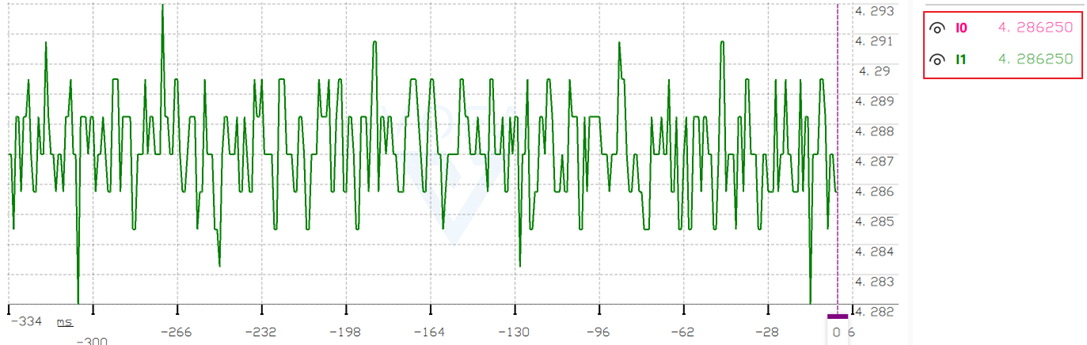
5.中值滤波
// 中值滤波
float medianFilter(const float Z)
{
static const int N = 9;
static float filterBuff[N];
for (int i = 0; i < N; i++)
{
filterBuff[i] = Z;
}
// 将采样值从小到大排序(冒泡排序算法)
bubbleSort(filterBuff, N);
return filterBuff[(N - 1) / 2];
}
// 冒泡排序
void bubbleSort(float arr[], int n)
{
for (int i = 0; i < n - 1; i++)
{
bool flag = true; // 没有排序为true,本趟有排序为false
for (int j = 0; j < n - 1 - i; j++)
{
if (arr[j] > arr[j + 1])
{
flag = false;
float temp = arr[j];
arr[j] = arr[j + 1];
arr[j + 1] = temp;
}
}
if (flag)
{
break;
}
}
}
6.完整程序
// 传感器滤波算法测试
#include <Arduino.h>
#include <INA226.h>
#include <Wire.h>
INA226 battery(0x44); // 对象实例化
void initINA226(); // 采样电阻设置0.01,最大电流8A
void ArduinoSheet();
void VofaDebug();
float slideFilter(const float Z); // 滑动均值滤波算法
float firstOrderFilter(const float Z); // 一阶低通滤波
float kalmanFilter(float Z); // 卡尔曼滤波
float medianFilter(const float Z); // 中值滤波
void bubbleSort(float arr[], int n); // 冒泡排序
int rowNumber = 0;
const int rowCount = 500; // 统计500个数据
void setup()
{
Serial.begin(115200);
Wire.begin();
initINA226();
}
void loop()
{
// // 记录传感器数据
// ArduinoSheet();
// 采用Vofa+进行调试
VofaDebug();
}
void initINA226()
{
battery.setMaxCurrentShunt(8, 0.01);
}
/*********************************************************************************************/
void ArduinoSheet()
{
if (rowNumber < rowCount)
{
float initData = battery.getBusVoltage();
float filterData1 = slideFilter(initData); // 滑动均值滤波
Serial.print(rowNumber++); // 行号
Serial.print(',');
Serial.print(initData); // 原始数据
Serial.print(',');
Serial.println(filterData1);
}
}
void VofaDebug()
{
float initData = battery.getBusVoltage();
float filterData1 = slideFilter(initData); // 滑动均值滤波
float filterData2 = firstOrderFilter(initData); // 一阶互补滤波
float filterData3 = kalmanFilter(initData); // 卡尔曼滤波
float filterData4 = medianFilter(initData); // 中值滤波
Serial.printf("%f,%f,%f,%f,%f\n", initData, filterData1, filterData2, filterData3, filterData4);
}
/*********************************************************************************************/
// 滑动均值滤波
float slideFilter(const float Z)
{
static const int N = 8;
static float filterBuff[N];
static int num = 0;
static float sum = 0.0;
if (num < N)
{
filterBuff[num] = Z;
sum += filterBuff[num];
num++;
return sum / num;
}
else
{
sum -= sum / N;
sum += Z;
return sum / N;
}
}
// 一阶互补滤波
float firstOrderFilter(const float Z)
{
static const float alpha = 0.7;
static float prevData = Z;
float filterValue = Z * alpha + (1 - alpha) * prevData;
prevData = filterValue;
return filterValue;
}
// 卡尔曼滤波
float kalmanFilter(float Z)
{
static float K = 0; // 卡尔曼增益
static float P = 1; // 估计误差协方差
static const float Q = 0.0025; // 过程噪声协方差,值增大,动态响应变快,收敛稳定性变差, Q控制误差,R控制响应速度
static const float R = 0.2; // 测量噪声协方差,传感器产生的噪声,值增大,动态响应变慢,收敛稳定性变好
static float prevData = 0;
P = P + Q;
K = P / (P + R);
Z = prevData + K * (Z - prevData);
P = (1.0 - K) * P;
prevData = Z;
return Z;
}
// 中值滤波
float medianFilter(const float Z)
{
static const int N = 9;
static float filterBuff[N];
for (int i = 0; i < N; i++)
{
filterBuff[i] = Z;
}
// 将采样值从小到大排序(冒泡排序算法)
bubbleSort(filterBuff, N);
return filterBuff[(N - 1) / 2];
}
// 冒泡排序
void bubbleSort(float arr[], int n)
{
for (int i = 0; i < n - 1; i++)
{
bool flag = true; // 没有排序为true,本趟有排序为false
for (int j = 0; j < n - 1 - i; j++)
{
if (arr[j] > arr[j + 1])
{
flag = false;
float temp = arr[j];
arr[j] = arr[j + 1];
arr[j + 1] = temp;
}
}
if (flag)
{
break;
}
}
}
















 2174
2174











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









