






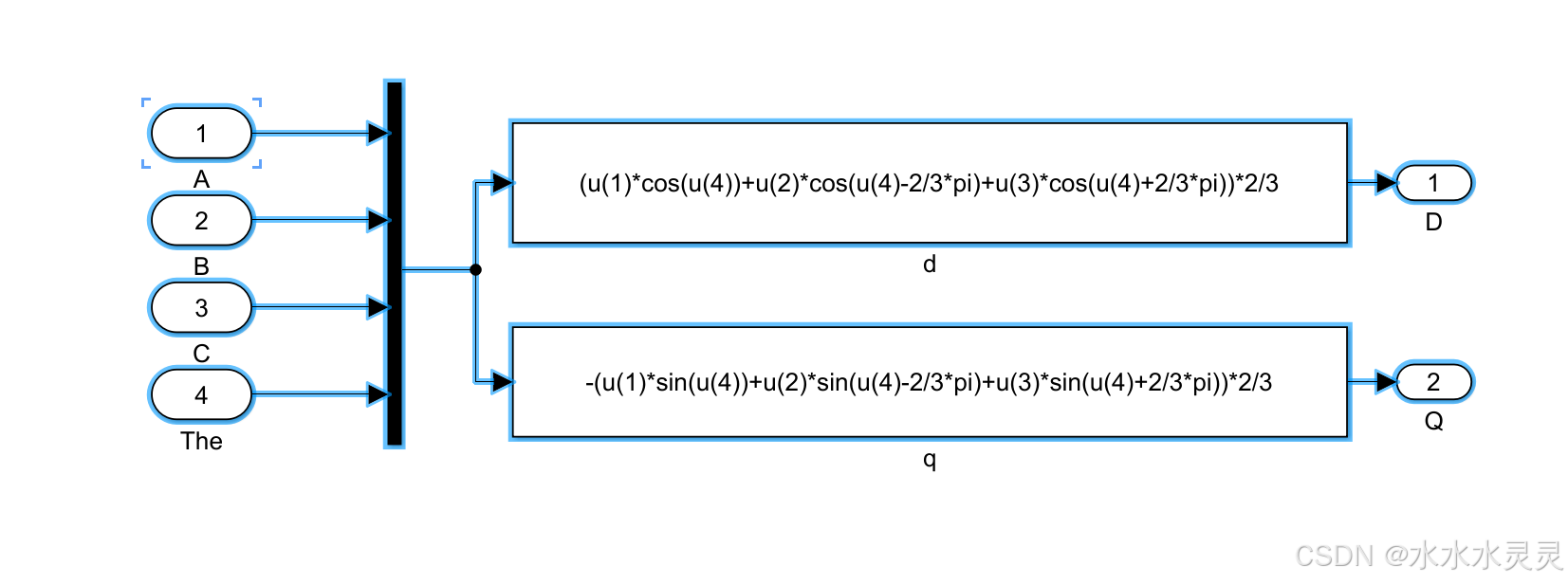
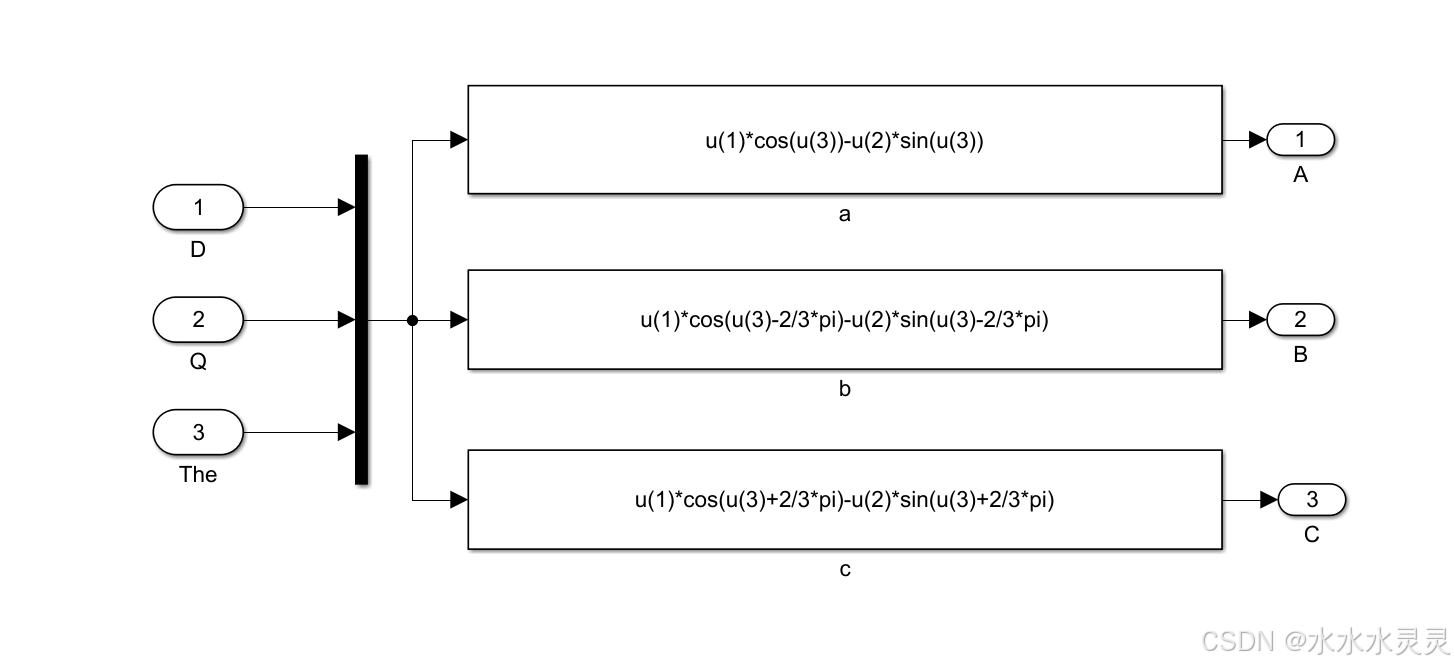
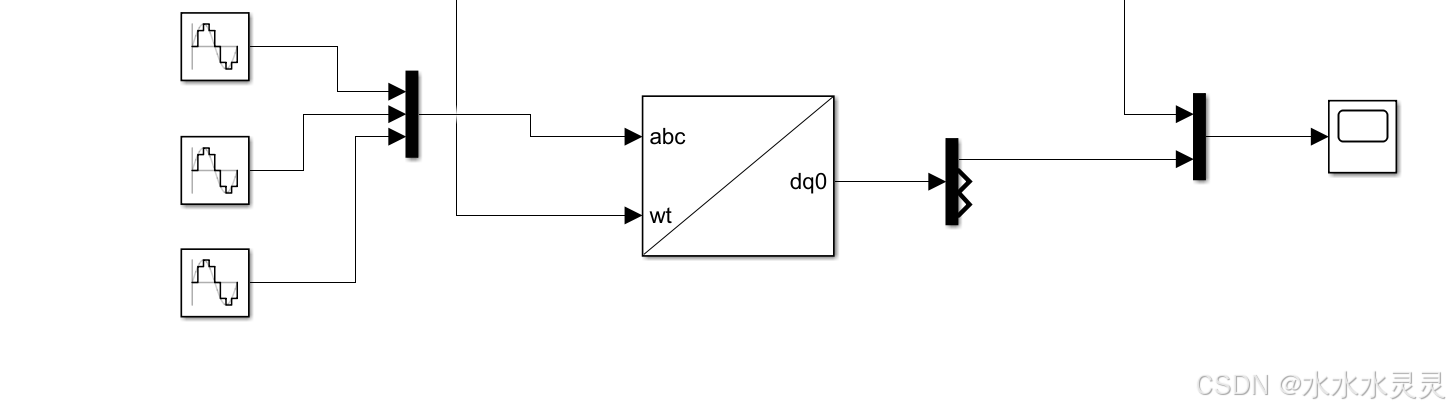
这边只讲解仿真过程中,simulink用到的工具,具体实现Park变化可以看视频了解。前面用到的元件也不会重新讲解,可以翻阅前面章节。
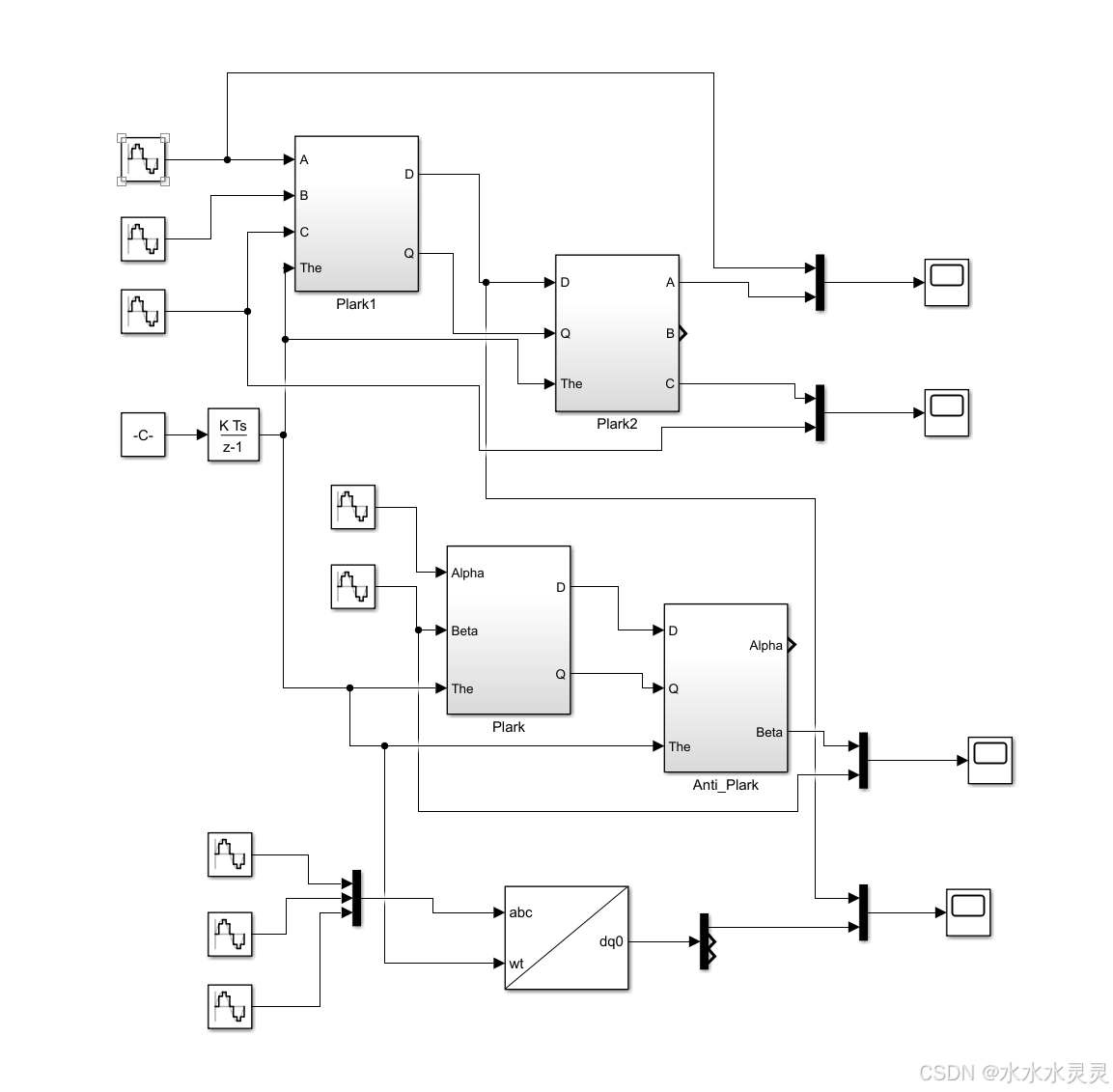
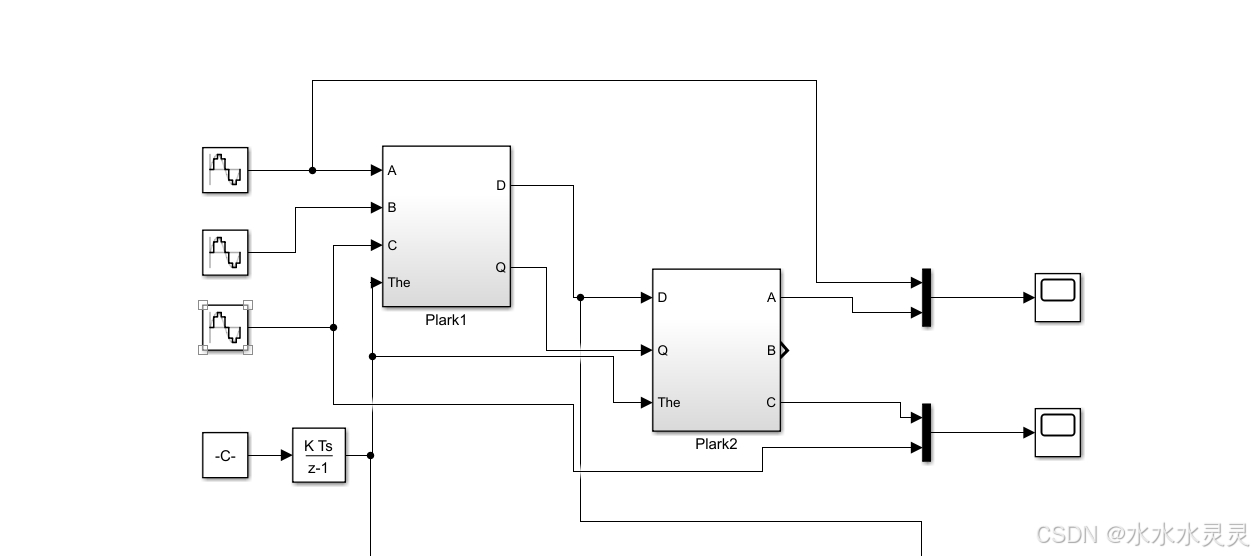
整体流程
其中用到的角速度积分
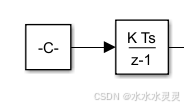
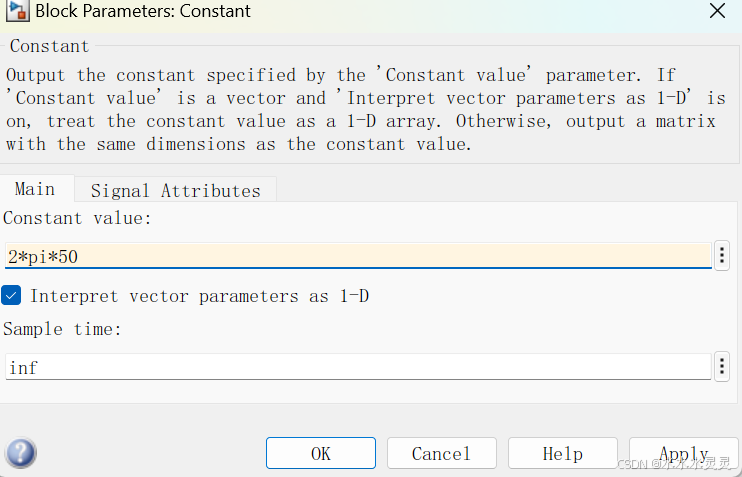
第一个是常量模块
输入常量为角速度频率为50hz,就是一秒50圈。
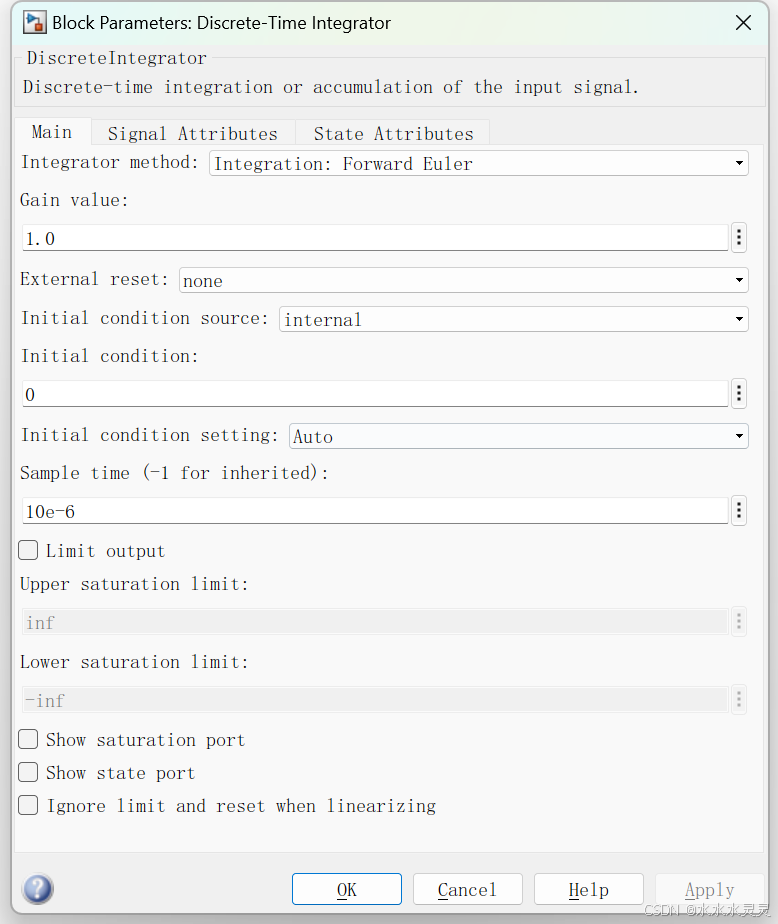
第二个模块是离散时间积分模块
参数
-
Integrator method(积分方法):
- 这里选择的是“Integration: Forward Euler”(前向欧拉法)。这是一种数值积分方法,用于离散时间信号的积分。
-
Gain value(增益值):
- 当前设置为 1.0,表示输入信号将直接以 1.0 的倍数积分,即对输入信号进行原始的积分。
-
External reset(外部复位):
- 这里设置为“none”,表示没有外部信号来重置积分器。如果选择其他选项,可以通过外部信号重置积分器的状态。
-
Initial condition source(初始条件来源):
- 选择了“internal”,表示初始条件是内部设置的,并且在下面的“Initial condition”字段中提供了初始值。
-
Initial condition(初始条件):
- 这里设置为 0,表示积分器的初始输出值是 0。
-
Initial condition setting(初始条件设置):
- 选择了“Auto”,表示 Simulink 会自动处理初始条件设置。
-
Sample time(采样时间)!!!!!!!!!!!!!!:
- 采样时间设置为
10e-6,表示这个模块每隔10e-6秒(或 1 微秒)进行一次计算。
- 采样时间设置为
-
Limit output(限制输出):
- 没有勾选,表示输出不受限制。如果勾选此选项,你可以设置上限和下限来限制输出值。
-
Upper saturation limit(上限值):
- 没有设置,默认是
inf(无限大),如果选择了限制输出,可以在这里设置输出的上限值。
- 没有设置,默认是
-
Lower saturation limit(下限值):没有设置,默认是
-inf(负无限大),同样,只有勾选了限制输出时,这里才会生效。
第三模块帕克变化和逆变化
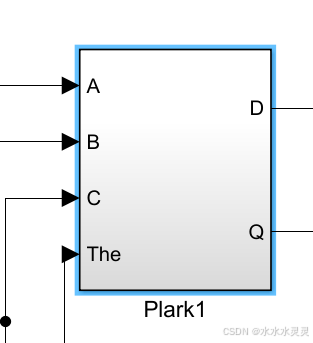
simulink自带帕克变化
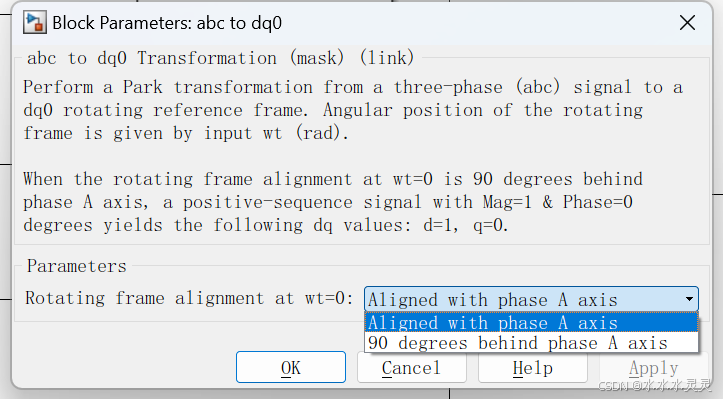
参数说明:
- Rotating frame alignment at wt=0:
- 该参数用于定义当 ωt=0\omega t = 0ωt=0 时,旋转坐标系相对于三相静止坐标系 abcabcabc 的起始对齐方式。可选择的对齐方式包括:
- Aligned with phase A axis(与 A 相对齐):在 t=0 时,
d轴与 A 相轴重合。 - 90 degrees behind phase A axis(落后 A 相轴 90 度):在 t=0 时,
q轴与 A 相轴重合。
- Aligned with phase A axis(与 A 相对齐):在 t=0 时,
d轴和q轴如何分解 A、B、C 三相信号。 - 该参数用于定义当 ωt=0\omega t = 0ωt=0 时,旋转坐标系相对于三相静止坐标系 abcabcabc 的起始对齐方式。可选择的对齐方式包括:

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









